基于X波段双线偏振雷达质量控制及云内水成物粒子识别方法研究
2020-03-30李晓敏魏挪巍娄宇航
李晓敏,魏挪巍,娄宇航
(1.四川省气象灾害防御技术中心,成都 610072;2.中国农业银行研发中心成都研发部,成都 610041)
引言
双线偏振天气雷达能交替(或同时)发射和接收水平和垂直方向的线性偏振波。相较普通多普勒雷达只能探测到3种参量,该雷达能探测到多达8种参量。这也意味着,在强对流天气监测[1]、雷暴云的结构分析[2]、云内水成物粒子的识别[3]、冰雹或冰雹区的识别[4]等方面双线偏振天气雷达具有明显的优势。
但是,双线偏振天气雷达的探测存在误差,在开展各项应用研究之前,需要对雷达数据进行质量控制,主要包括对差分传播相移(φDP)进行相位退折叠、滤波。如果是X波段或C波段的雷达,还需要进行衰减订正[5]。其中,退折叠则是检查的径向连续性后,将发生折叠的φDP加上180°(或360°),以保证其连续递增[6]。而滤波,国内早期则主要采用相对简单的滑动平均、中值滤波;近年来,随着相关研究的深入,小波去噪等方法也开始应用于双偏振雷达[7]。一般,滤波后的φDP就可以应用于反射率因子(ZH)以及差分反射率因子(ZDR)的衰减订正。目前,求取衰减率的方法主要有:ZH订正法、KDP订正法、降雨廓线算法、ZH-KDP综合订正法和自适应约束算法[8-11]。国内外的许多研究都表明,自适应约束算法相较于前三种方法,有更广泛的适用性[12]。
双线偏振天气雷达的多探测量可设定阈值以实现对水成物粒子的分类。目前,已知主要有5种可用于粒子识别的方法[13]。其中,模糊逻辑算法可较为有效的解决决策树识别中阈值重叠的问题;并且,相对于统计决策理论又具有简便和易于建立隶属函数的两个优势。此外,神经网络[14]和聚类分析[15]需要基于大量雷达观测资料进行自我训练,达到对水成物粒子的识别,而车载雷达一般仅在雷暴天气进行观测,数据积累较少难以广泛使用[16]。可以说,模糊逻辑算法是目前可以采用的最优识别方法。但单一的模糊逻辑算法本身对一些冰水混合粒子的识别效果较差,还有待分析。
虽然关于质量控制及粒子识别已有较多的研究,但是,这些方法都只注重某一方面的研究,例如单纯从滤波方面进行比较研究,缺乏对整个质量控制过程的梳理,对后续开展相应的云微物理过程、降水估测等应用研究帮助不大。因此,本文将基于双线偏振天气雷达进行退折叠、滤波、衰减订正及水成物粒子识别效果的对比研究,以期能得到一套较好的质量控制及粒子识别方法,为X波段双线偏振天气雷达的应用研究提供更多的参考。
1 数据与方法
1.1 数据
本文使用的资料主要为雷达数据,分别来自北京的714XDP-A型车载X波段双线偏振天气雷达和SA波段雷达探测。其中,X波段双线偏振天气雷达位于北京顺义(40.18°N,116.68°E),采用同时发射体制,可探测8个参量,其具体参数如表1所示。SA波段雷达位于北京大兴(39.81°N,116.47°E),可探测9个仰角(0.48°、1.32°、2.29°、3.21°、4.17°、5.89°、9.76°、14.41°、19.34°)的3个参量,包括:反射率因子(Z)、多普勒速度(V)和速度谱宽(W)。
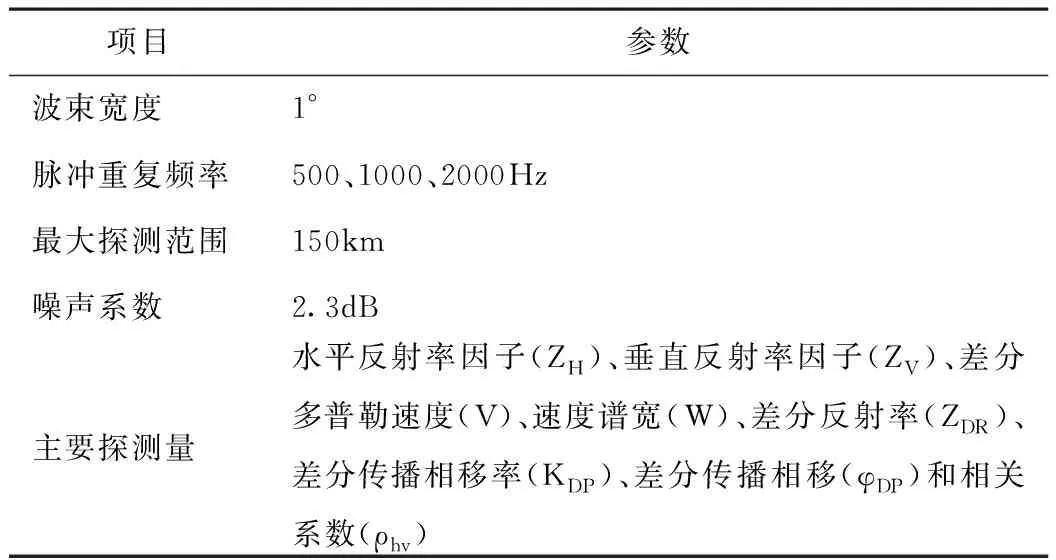
表1 714XDP-A型X波段双线偏振天气雷达主要参数
1.2 方法
本文所用的方法包括质量控制的相位退折叠、滤波、衰减订正,以及粒子识别的模糊逻辑算法,并针对几种方法进行比较分析。
差分传播相移是电磁波在降水区域传播时由非球形降水粒子引起的水平偏振传播常数和垂直偏振传播常数之差,也是双偏振天气雷达区别于普通天气雷达的重要参量之一,并且,其值会对衰减订正的结果产生影响。差分传播相移是距离累计量,其值随距离增大。退折叠则便是检查φDP的径向连续性后,将发生折叠的φDP加上180°(或360°),以保证其连续性[11]。
滤波是为了能有效的剔除由于非瑞利散射造成的后向差分传播相移,即δ效应,如下面公式1:
φDP=φDP+δ
(1)
其中,φDP是雷达探测的总差分相移,φDP是差分传播相移,δ是后向差分传播相移。φDP是信号,δ是噪声。早期,国内外主要采用相对简单的滑动平均、中值滤波。近年来,随着基于双线偏振天气雷达研究的深入,又相继提出小波去噪[17]等新方法。
所谓衰减是粒子对电磁波吸收作用和散射作用的总和。其中,X波段雷达受衰减影响最为严重,S波段雷达则不需要做衰减订正,可用于对比衰减订正效果。本文主要采用自适应约束算法,动态计算衰减率(AH)进行衰减订正[17]。
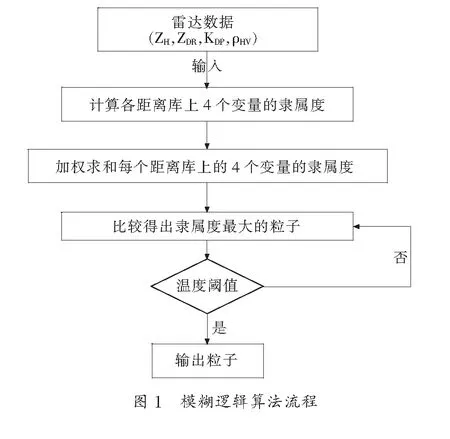
最后,基于模糊逻辑算法对云内水成物粒子识别开展的研究。模糊逻辑算法流程如图1所示,在本文中输出的粒子分为10种:毛毛雨(DR)、雨(RA)、干雪(DS)、干冰晶(DC)、湿雪(WS)、干霰(DG)、湿霰(WG)、小冰雹(SH)、大冰雹(LH)、雨夹雹(RH)。
根据雷达参数、研究目的等差异,隶属成员函数主要有beta型、对称梯型和不对称梯型函数三种。诸多研究表明,对称型函数并不适用于所有的粒子类型。因此,本文采用不对称梯型函数进行水成物粒子的识别,如下面公式2:
(2)
其中,X1,X2,X3,X4的值参考Park[16]、曹俊武[18]等的成果。由于不同参数的识别能力不同,本研究采用各参数非等权重的设置,根据参数的识别能力由大到小[16,19]将ZH、ZDR、KDP、ρHV的权重进行调整,分别设为0.4、0.3、0.2、0.1。
2 基于X波段双线偏振雷达的质量控制
2.1 差分传播相移退折叠
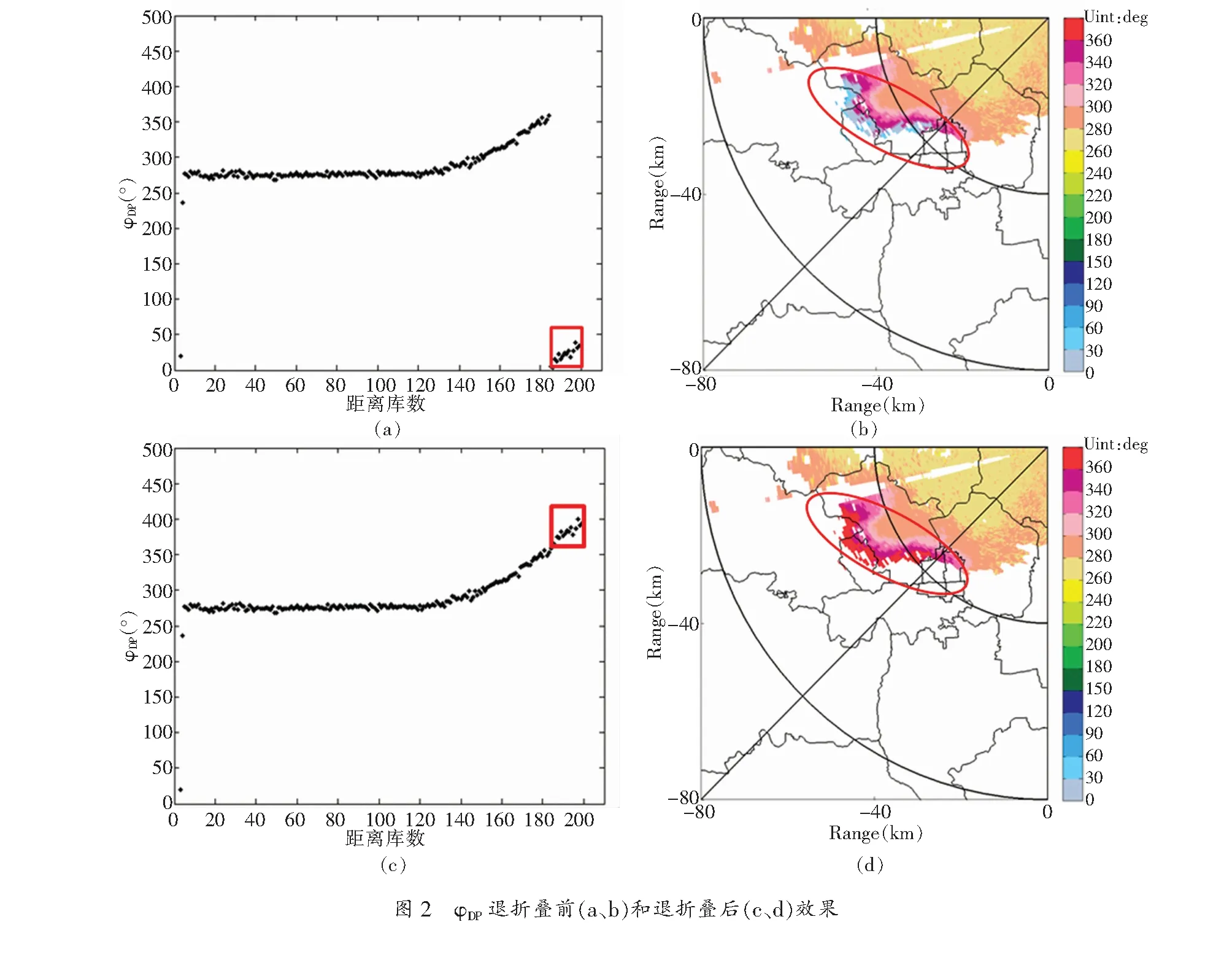
差分传播相移是电磁波在降水区域传播时,由非球形降水粒子引起的水平偏振传播常数和垂直偏振传播常数之差,也是双偏振天气雷达区别于普通天气雷达的重要参量之一,并且其值会对衰减订正的结果产生影响。差分传播相移是距离累计量,即随距离增大。这里,所使用雷达的φDP值区间为0°~360°,当φDP真实值超过区间范围时,其探测值会从360°跳转到0°,重新开始递增,这就是所谓的相位折叠。图2(a)就清楚展示了φDP发生相位退折叠时其距离廓线的情况,在180°距离库左右,φDP的值突然从360°左右降低到0°左右,然后再随距离逐渐增加,因此,需要对φDP进行相位退折叠。选取2015年6月26日20:35时的φDP数据进行退折叠,图2(a)、(c)为方位角240°的φDP距离廓线,图2(b)、(d)为西南方向的φDP分布。可以看到:对φDP进行退折叠后,其距离廓线相较退折叠前具有更好的连续性,呈现单调递增趋势;而该时刻φDP整体分布也显示出:退折叠后的φDP相较于退折叠前的φDP,数据质量有明显提升,离雷达40km外大量存在的0°~60°的φDP得到修正,数据质量明显提高。
2.2 滤波
为了尽量减少δ效应对测量φDP的影响,这里,采用近两年应用于双线偏振天气雷达的小波去噪[8]对原始差分传播相移φDP进行滤波,由此得到φDP,并与早期相对简单的滑动平均和中值滤波进行对比分析。同样选取2015年6月26日20:35时方位角为240°的φDP,可得到结果(图3):滑动平均和中值滤波分别采用了5点、9点和13点滤波(即N=5,9,13),对比可以看到N值越大,滤波后信号越平滑,但13点滑动平均和13点中值滤波不仅剔除了由于δ效应造成的噪声,近地处的地物信息也同时被滤去。而采用db5小波去噪的方法,相比13点滑动平均和13点中值滤波,既能保留靠近雷达处的地物信息,也能较好地去除其他信息造成的毛刺,这与魏庆等[20]的对比研究结果基本一致。因此,在后续的研究中均采用小波去噪的方法对该雷达数据进行处理。
2.3 衰减订正
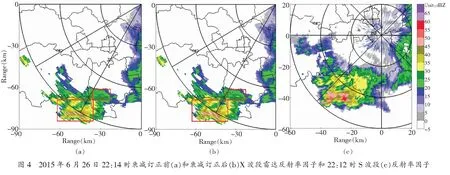
X波段雷达的波长相较于S、C波段雷达较短,仅为3cm,云、雨滴和气体分子等会对其能量产生吸收和散射,造成的衰减严重。因此,参考Park[21]和毕永恒[12]的改进自适应约束算法对ZH进行衰减订正,结果如图4、图5所示。
从图4可以看到:订正后方框内ZH>45dBZ的极大值区范围扩大,强度增强至50dBZ;而ZH>30dBZ相对大值区也有所增强,订正后反射率因子大小与S波段雷达探测结果更接近。但是,由于雷暴云相对于X波段雷达和S波段雷达的位置不同,探测时间、仰角、距离都有一定的差异,所以订正后难以与S波段雷达探测效果一致。
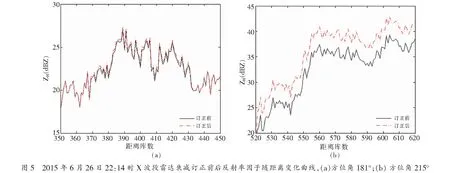
为了进一步分析衰减订正的效果,挑选方位角181°和215°两个径向作回波强度随距离的变化曲线(图5),可以看到:对于较弱的回波区,订正后的ZH相比订正前的ZH略有增加,在0~1dBZ;而对于较强的回波区,订正后的ZH增强明显,增幅可达5dBZ左右。
3 基于X波段双线偏振雷达的云内水成物粒子识别方法
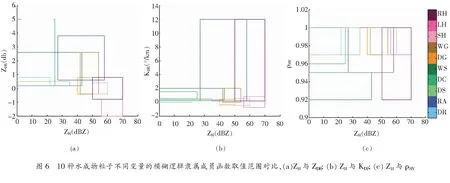
下面,对模糊逻辑算法识别云内水成物粒子的优势及参数设置的合理性进行简要讨论。图6给出了不同变量模糊逻辑隶属成员函数取值中心所在范围的对比情况。由ZH和ZDR的关系(图6a)可见,虽然在ZH方向上有多种相态重叠在一起的情况,但在考虑ZDR后可进行一定程度的区分。例如,雨的ZH范围虽然和湿雪、霰、冰雹等多种水成物粒子都有重叠,但其ZDR正值范围要比上述相态都大,这是因为大雨滴下落过程中因空气阻力会变形,使得横轴大于纵轴,从而使ZDR值较大,且多为正值;而冰雹等固态粒子则不具有这种特性。对于冰雹而言,其很可能在上升或下降的过程中,上下翻滚使得被探测时的纵轴看起来更大,因此,ZDR更可能为负值。而在ZH与KDP、ρHV(图6 b,c)的范围对比中也可以用类似的情况区分不同的粒子。总体而言,模糊逻辑算法可以较全面地考虑到各种水成物粒子在不同参数中重叠的情况,而这也是双线偏振雷达与传统单极化雷达相比的优势所在。

此外,为了提高识别的准确性,根据不同粒子存在所需的温度条件,引入常规探空资料的环境温度(T)对其做一定的限制:如毛毛雨不能在0℃层以上出现,雨夹雹等只能出现在-10℃层以下等。各种粒子具体的温度参数设置亦可见表2。
并且,根据2015年6月26日20时、8月7日20时的温度廓线,对其各温度层高度进行了统计,结果见表3。

表3 2015年6月26日和8月7日各温度层高度(单位:km)
由图7a~d可知:ZH由粒子相态、数密度和尺寸决定;ZDR则是由水平和垂直偏振反射率因子之比决定,通常液态粒子的值>0dB,且尺寸越大值越大,而固态粒子则较小;KDP主要由液态粒子决定,液态粒子数密度越大其值越大;而ρHV则随不同情况有所不同,一般液态粒子的值可达0.95及以上,其他相态粒子则要视情况而定。
图7(f)中雷达正南方向40~70km的雨滴区,其对应ZH值>20dBZ,ZDR值就明显大于其他区域,达到1.5dB,KDP值也相对较大,ρHV也普遍>0.95。而在雷达西南向80~100km的区域,由于此时所探测高度已经略微高于0℃层,识别中排出了小雨滴即毛毛雨,此区域ZH值>30dBZ,部分>45dBZ,ZDR值则位于0.5~1dB;KDP值为0~0.5°/km,这可能是由于其间有固态粒子;相关系数普遍>0.95,ZH值>45dBZ部分相关系数多为0.9以上;综合来看,此区域外围30~45dBZ区域多为雨滴,>45dBZ的区域为霰粒子。对比图7(e)、(f),在0℃层内,未加入环境温度参数的识别效果多为冰相粒子,与理论不符。
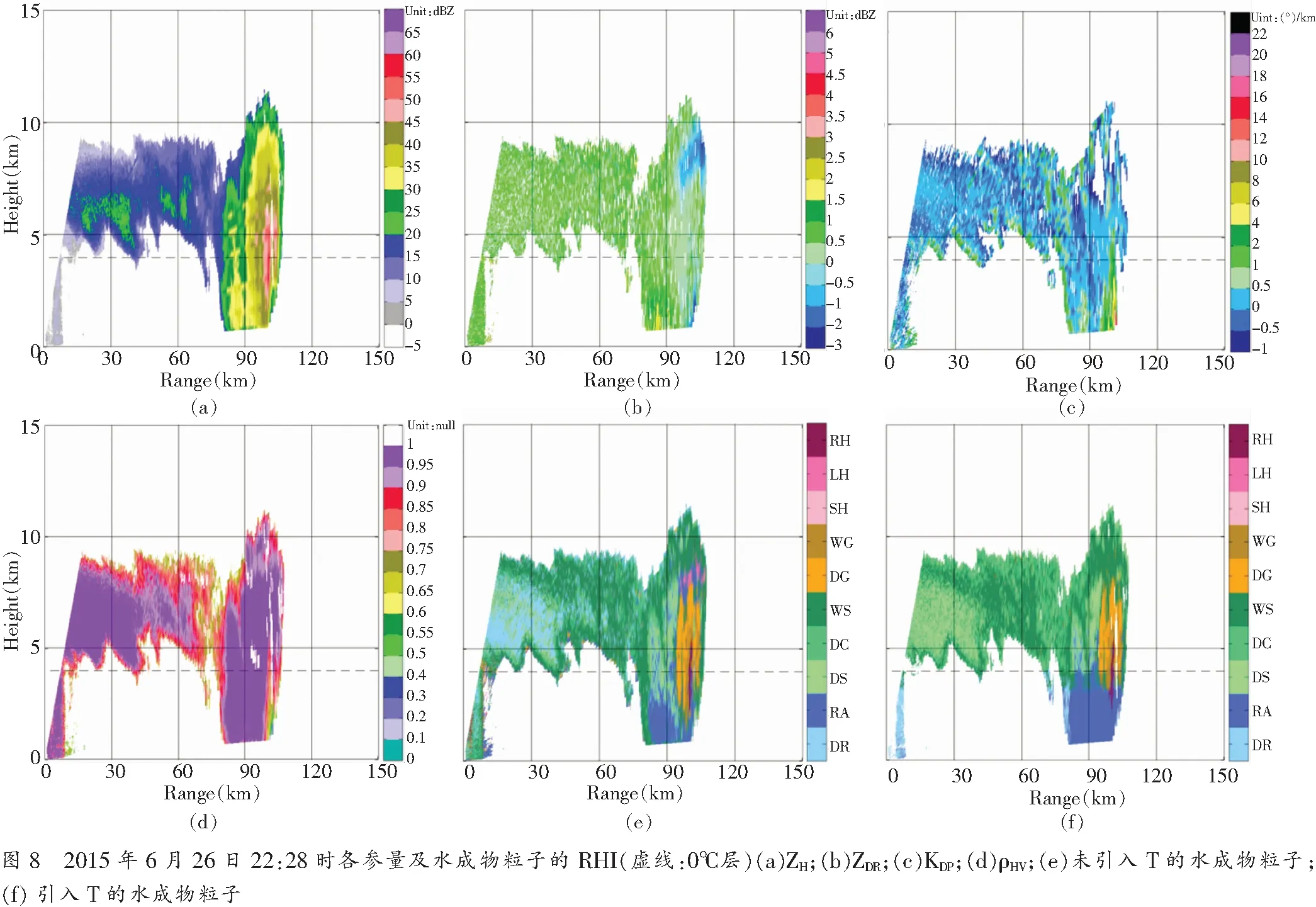
图8表明:距雷达100km、高3~8km为ZH值>40dBZ的强回波区,中心值可达50dBZ以上,ZDR值为0~0.5dB,KDP值<0.5°/km,ρHV也普遍>0.95;对图8 (e)、(f)的识别,该区域均对应大量霰子夹杂冰雹粒子,其分布都较为合理。然而,未引入环境温度的图8(e),其识别结果存在两处不合理:一是同PPI图相似,其0℃层以下,有大量冰相粒子存在,冰水粒子混合;二是在距雷达100km、高8~9km处分布有大冰雹,而图8(a)该区域ZH值低于40dBZ,推测是由于此处的ZDR明显偏小,而KDP存在缺测所致。而加入环境温度作为识别参量的图8(f),这两种不合理都得到明显的改善。

4 结论与讨论
本文讨论了X波段双线偏振天气雷达的质量控制方法,并比较了基于模糊逻辑算法进行水成物粒子识别的效果,由此构建一套较为完整的X波段双线偏振雷达的质量控制与粒子识别方法。得到的主要结论如下:
(1)采用径向连续性检查的方法对差分传播相移进行相位退折叠后,其连续性得到明显提升。滤波方法对比发现,13点滑动平均和中值滤波的效果好于5点、9点滑动平均和中值滤波,但是二者均过度滤去了有效回波信息。而小波去噪相较13点滑动平均和中值滤波既能较好地去除毛刺,也能较完整地保留有效信息。采用自适应约束算法进行衰减订正后,X波段与S波段雷达差异减小。其中,强回波区的回波强度明显增强,增幅可达5 dBZ;而弱回波区的增幅较小。
(2) 基于模糊逻辑算法能较好地解决阈值重叠所造成的识别困难。此外,环境温度参数作为限制条件,对解决0℃层以下液态粒子与冰相粒子混合,以及其他粒子分布不合理的现象有明显效果。
(3) 在以上基础上,构建一套基于径向连续性检查-小波去噪-自适应约束算法的质量控制方法和引入环境温度限制的模糊逻辑算法的粒子识别方法。
需要指出的是,本研究所建立的X波段双线偏振雷达质量控制与粒子识别方法,虽然能为X波段双线偏振雷达的应用,特别是云内微物理过程的研究提供一定的参考。但仍存在不足,如加入环境温度参数后,各温度层间的水成物粒子识别结果有较为明显的界限,这还有待改进。并且,由于缺乏实测的云内水成物粒子分布,其基于模糊逻辑算法的识别效果研究更多的是基于理论层面,今后应进一步分析验证。
