基于自抗扰控制方法的自动着陆飞行控制律设计*
2020-03-30李广文曹睿婷薛广龙
张 祥,李广文,曹睿婷,薛广龙
(1 西北工业大学自动化学院, 西安 710072; 2 西安飞行自动控制研究所, 西安 710065;3 中国航空无线电电子研究所, 上海 200233)
0 引言
民机进近着陆在整个飞行过程中占的时间很短暂,但是却是飞行过程中最复杂、事故发生最多的阶段[1]。在着陆阶段,各种大气扰动对飞机着陆产生不利影响[2],给飞机着陆控制带来困难。
我国韩京清等提出的自抗扰控制(ADRC)方法,充分吸收现代控制理论成果,完善了PID控制的一些缺陷,在不依赖被控对象精确的数学模型,也无需知道外界干扰的具体模型的前提下,根据输入输出信号实时的估计系统的总和扰动,在控制输入中将干扰补偿[3-6],使控制对象只受控制舵面的作用,具有鲁棒性强、控制精度高、易于实现等特点。
鉴于自抗扰控制方法的优势,文中采用自抗扰控制方法来设计着陆控制律。首先对自抗扰控制算法中不光滑的非线性函数fal函数进行改进,将其改进成连续光滑函数以提高自抗扰控制器性能,并利用改进后的自抗扰控制算法设计飞机的姿态控制律和自动油门控制律。最后在大气紊流、参数摄动条件下进行仿真。仿真结果表明,基于自抗扰控制方法的自动着陆控制律控制效果很好,能满足控制要求。
1 自抗扰控制器基本原理及算法
自抗扰控制器(ADRC)由跟踪微分器(TD)、扩张状态观测器(ESO)、状态非线性误差反馈(NLSEF)和输入补偿等构成[6]。自抗扰控制器原理框图见图1。
跟踪微分器主要为指令信号安排一个过渡过程,同时获得指令信号的近似微分信号。在图1中,v1跟踪信号v0,v2是v0的微分信号。扩张状态观测器是自抗扰控制器的核心,主要对系统的总和扰动进行实时的观测估计,以便在输入控制中进行补偿,其中z1是输出y的估计值,z2是输出y的微分信号,z3是系统扰动估计量。非线性误差反馈采用非线性函数,将得到的偏差信号、偏差信号的微分信号进行非线性组合得到初始控制量u。扰动输入补偿在输入控制中将实时估计的扰动作用进行补偿。
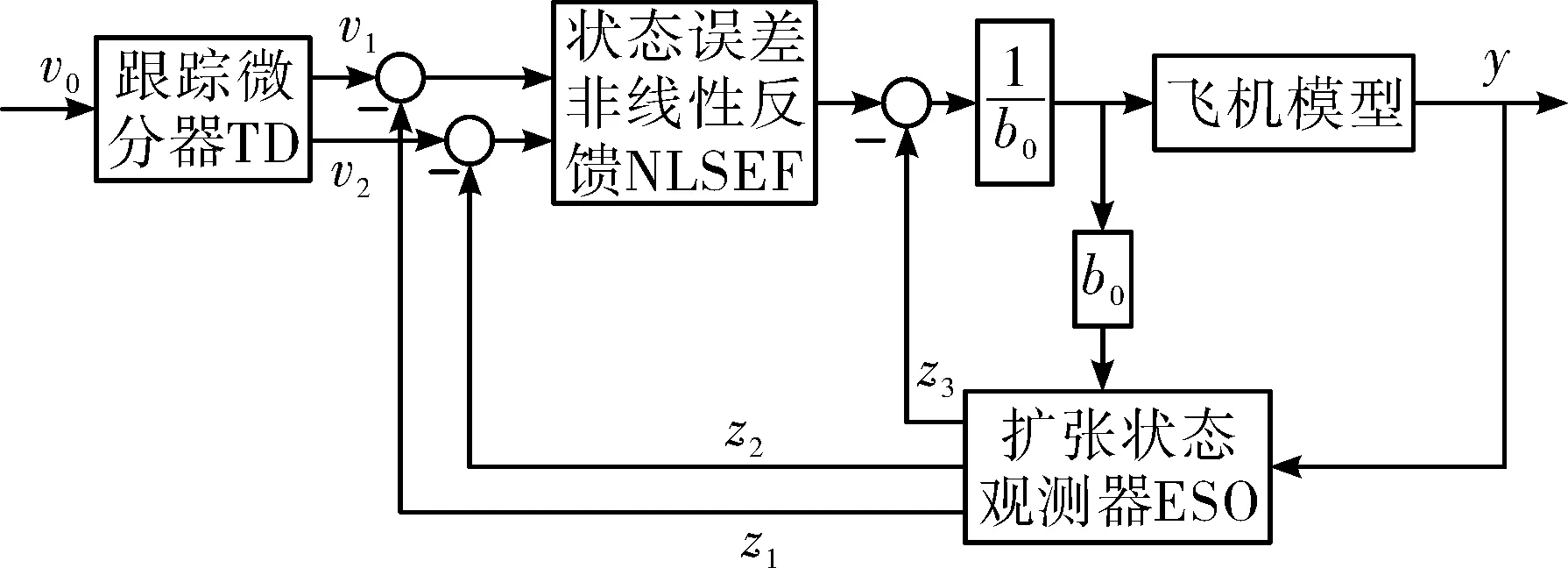
图1 自抗扰控制原理柜图
在实际过程中,自抗扰控制器通过离散化算法来实现,具体算法描述如下:
1)安排过渡过程
(1)
2)扩张状态观测器
(2)
3)非线性误差反馈
(3)
4)扰动误差补偿
u=(u0-z3)/b0
(4)
其中fhan(x1,x2,r,h)是最速综合控制函数,其表达式可见参考文献[6],r表示 “速度因子”,h0是 “滤波因子”,h是采样时间步长,e是扩张状态观测器中实际输出值与输出估计值的误差,其余参数详见文献[7]。
2 非线性函数fal函数的改进
fal是ADRC中的关键函数,是一种特殊的非线性结构,是对“大误差、小增益;小误差、大增益”这一经验的数学拟合[8]。在ESO中用fal函数和适当的观测器参数可以得到系统所有状态的观测值;在NLSEF中使用fal函数可以得到控制指令值;fal函数还具有滤波功能[9],可以说fal是ADRC的核心单元,其表达式如下:
(5)
fal虽然连续但不可导,其随误差e的变化如图2实线所示(a=0.25,δ=0.1)。当e在线性段内(±δ)变化,则能有效解决ADRC高频震颤问题;但当δ需要调节的很小时,导数会出现突变导致性能变差,产生更大幅度的振荡[10]。因此文中将fal函数改进成在整个实数域内连续光滑,以改良其性能。
2.1 连续光滑Ifal函数的构造
将fal函数改进成连续光滑的关键在于将线性段部分改造成连续光滑的部分,将改进的函数称Ifal(e,a,δ)。在|e|>δ的区间内,函数与原函数一致。
(6)
在|e|≤δ的区间内,为保证函数在原点的取值为零且连续,选取Ifal(e,a,δ)为:
Ifal(e,a,δ)=pe3+qe2+re
(7)
于是改进的关键在于求取p,q,r参数的值。在此采用反推法,假设Ifal函数是连续可导的,则在分段点处应该满足:
(8)
此外Ifal应满足在原点处可导,因此有:
(9)
根据上述条件可以得到:
(10)
对式(7)进行方程求解可以得到:
(11)
因此改进后Ifal函数的完整表达式为:
(12)
当a=0.25,δ=0.1,Ifal函数随误差e变化图如图2虚线所示,可以看出在分段点处,函数是以光滑平稳的趋势进行过渡的,这样便能有效的解决分段点处的高频振荡问题。
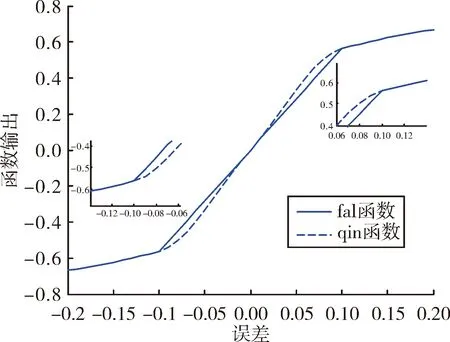
图2 fal和qin函数随误差变化曲线
2.2 Ifal函数的连续可导证明
按2.1所述方法构造出的函数是连续光滑的,此处对其连续可导性进行数学证明。由于各分段函数本身是连续可导的,在此主要证明分段点处是否连续可导。
连续性证明,在分段点e=δ处:
当e=δ+时:Ifal(δ+)=|δ|asign(δ)=δa;
当e=δ时:Ifal(δ)=(a-1)δa-3·e3-(a-1)δa-2·
e2sign(e)+δa-1e=δa。
所以有Ifal(e=δ)=Ifal(e=δ+),可以说明函数在分段点e=δ处连续,同理可证函数在分段点e=-δ处也连续。
可导性证明,在分段点e=δ处:
当e=δ+时:Ifal′(δ+)=a|e|a-1sign(e)+|e|a·(sign(e))′,因为当e>0时,有sign(e)′=0,因此有:Ifal′(δ+)=aδa-1;
当e=δ时:Ifal′(δ)=3(a-1)δa-3·e2-2(a-1)·δa-2esign(e)-(a-1)δa-2e2(sign(e))′+δa-1=aδa-1。
因此有Ifal′(e=δ)=Ifal′(e=δ+),可以说明函数在分段点e=δ处可导,同理可证函数在分段点e=-δ也可导。
综上,Ifal函数是连续可导的光滑函数。
3 基于ADRC的着陆控制律设计
大型民机的着陆控制系统是一个复杂的多输入多输出系统,它的俯仰通道、偏航通道以及速度通道之间存在着耦合作用[11]。依照自抗扰控制思想,将各通道间的耦合作用、外界大气扰动、气动参数摄动等作为整个系统总和扰动进行实时估计,最后在控制输入中将总和扰动进行补偿,从而使得控制器本身拥有自己抵御干扰的能力。综上,在此对俯仰、滚转姿态控制设计二阶的自抗扰控制器,对速度控制设计一阶自抗扰控制器,其控制结构图如图3所示。

图3 采用自抗扰控制方法的控制结构
3.1 基于自抗扰控制的姿态控制律设计
根据飞机的数学模型,可以得到飞机俯仰运动的非线性运动方程为[12]:

(13)
按自抗扰控制思想和飞行动力学的知识,将其改写为二阶微分形式:

(14)

(15)
式中,Ix、Iy、Iz、Ixz是飞机的转动惯量和惯性积;p是滚转角速率;M是俯仰力矩,其表达式为:
其中,ρ是大气密度;V是空速;S是机翼参考面积。其余参数定义见文献[12]。
将式(15)代入式(14)中可以得到:
(16)
式中,fθ表示系统的总和扰动,由于飞机在做俯仰运动时,认为φ保持配平初值状态不变,近似为0,故cosφ≈1。

(17)
式(17)便是俯仰角自抗扰控制器中的核心部分ESO的状态方程,使用式(1)~式(4)中自抗扰控制器的离散化算法,整定相应变量参数,便能得到很好的俯仰角控制效果。
针对ADRC中的参数b0,一般是作为未知参数进行整定,但是由式(16)可得出b0=(0.5ρV2ScACmδe·δe)/Iy,由该式可以在初始配平条件下计算出b0的初始估计值,在此值的基础上进行参数整定,可以降低参数整定难度和加快调参过程。
同理,在设计滚转姿态控制时,只考虑横侧向运动,不考虑纵向运动,此时可认为θ和q是固定的,保持配平初值不变。由于滚转姿态控制与俯仰姿态控制的原理与设计步骤几乎一致,只是滚转角方程以及其二次微分方程和滚转力矩的计算公式不同,在此只列出相关公式,具体设计过程可参照上述的俯仰角设计。
(18)

3.2 基于ADRC方法的自动油门控制
在飞机着陆时,自动油门控制主要将速度降低到着陆速度并保持着陆速度稳定。
根据飞行动力学的知识,可以得到飞机的速度微分方程为:
(19)
式中:T、D、m分别表示推力、阻力和飞机质量;Gx是飞机重力在机体轴x轴的分量。
在设计自动油门控制律时,认为飞行速度只受油门开度δp的影响,将其它因素对速度的作用都视为系统扰动。由于无法直接得出飞行速度与油门开度的显式函数关系,将采用隐式方式表达如下:
(20)
式中:fv(t)是总和扰动;δp是油门开度。

(21)
使用式(1)~式(4)中的自抗扰离散化算法,将ESO的二阶算法换成一阶的离散化算法,整定参数,即可得到较好的控制效果。
此处参数b0无法通过表达式计算出初始估计值,在此借用配平线性化方式来确定b0的初始估计值。在h=1 000 m、V=100 m/s 处进行配平线性化,得到:
(22)
式中δp的系数2.193 8就是b0的初始估计值,在此基础上进行参数整定,可以降低调参难度和加快调参过程。
4 仿真结果与分析
为验证文中基于ADRC着陆控制律的有效性,以某型运输机为对象,在紊流和参数摄动条件下进行仿真验证。
仿真条件1:为验证改进的Ifal函数能否提升控制器性能,以俯仰角姿态控制进行仿真验证。分别使用两个非线性函数进行控制器设计,经过参数调节,在同一组参数下(ESO中的fal和Ifal内部参数δ取0.1)。配平俯仰角为3.01°,给定10°的俯仰角指令,仿真结果如图4所示。

图4 δ=0.1时的俯仰角响应曲线
可见在该组参数下,使用fal函数和Ifal函数的效果几乎完全一致。但是在其余参数不变,改变δ的值后,Ifal中的δ可以变得极小而不会影响控制效果,而fal的δ变的较小时将会发散。如把δ从0.1调节到0.02以下时,Ifal的效果几乎不变,而fal的曲线产生振荡,如图5所示,其原因在于当δ发生变化时,ESO使用fal估计状态微分时产生了高频振荡,而改进的Ifal具有很好的稳定性。这表明改进的Ifal函数对参数δ不敏感,δ选取范围大,能有效避免振荡,提升控制器性能。
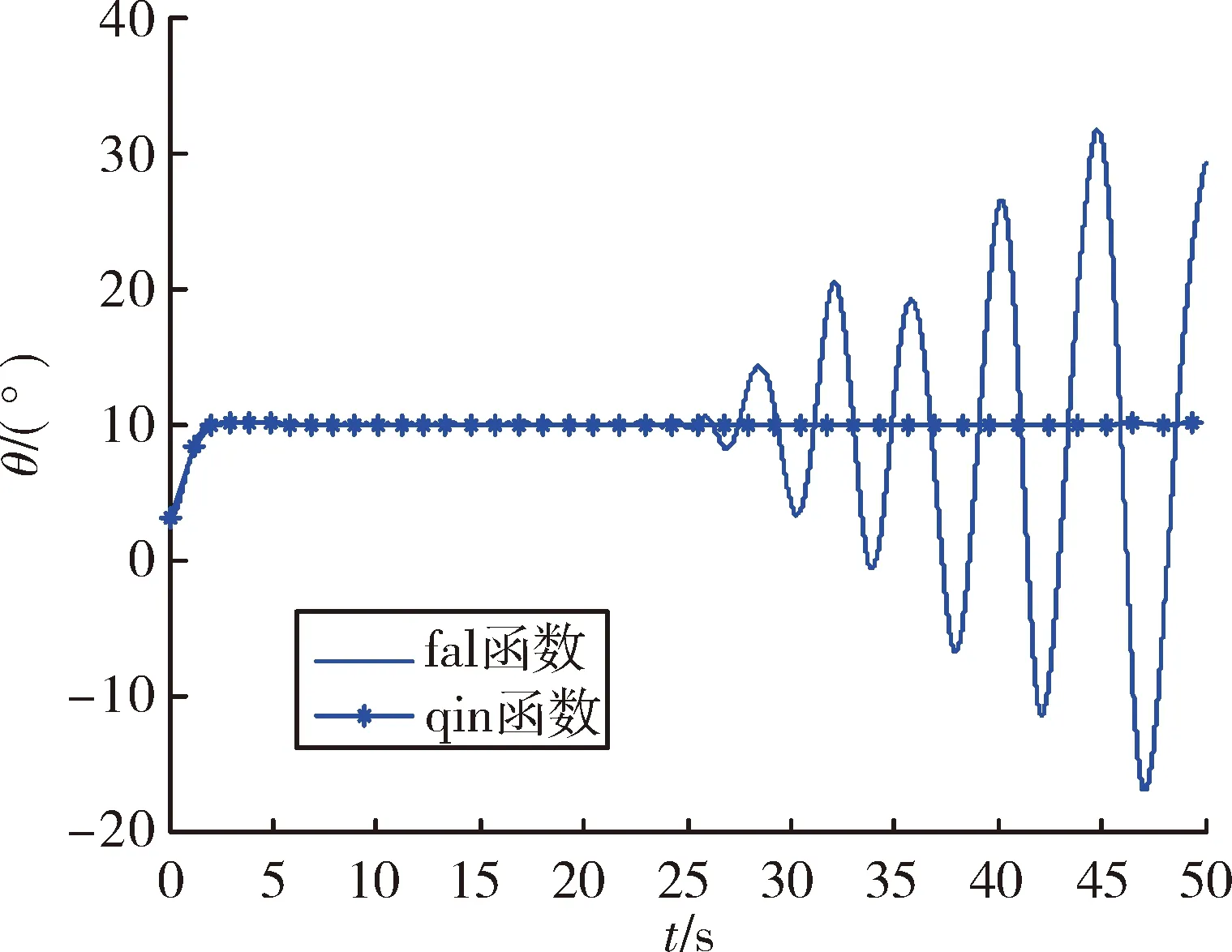
图5 δ=0.02时俯仰角响应曲线
仿真条件2:选取配平状态为H=500 m,V=80 m/s的定常平飞状态。飞机先在500 m定高飞行,当飞机截获下滑波束后,沿3°的下滑波束中心线下滑直至接地。该实验针对飞机无干扰着陆和在中度大气紊流干扰下着陆进行对比仿真,大气紊流模型采用典型的Dryden模型[14-16],根据文献[14]中大气紊流风干扰强度σu、σv、σw的范围,取σw=5 m/s,σu=σv=8 m/s来模拟中度大气紊流,沿机体轴三轴的风速变化可见图7。飞行状态和着陆轨迹如图6~图12。

图6 沿机体轴三轴的风速随时间变化
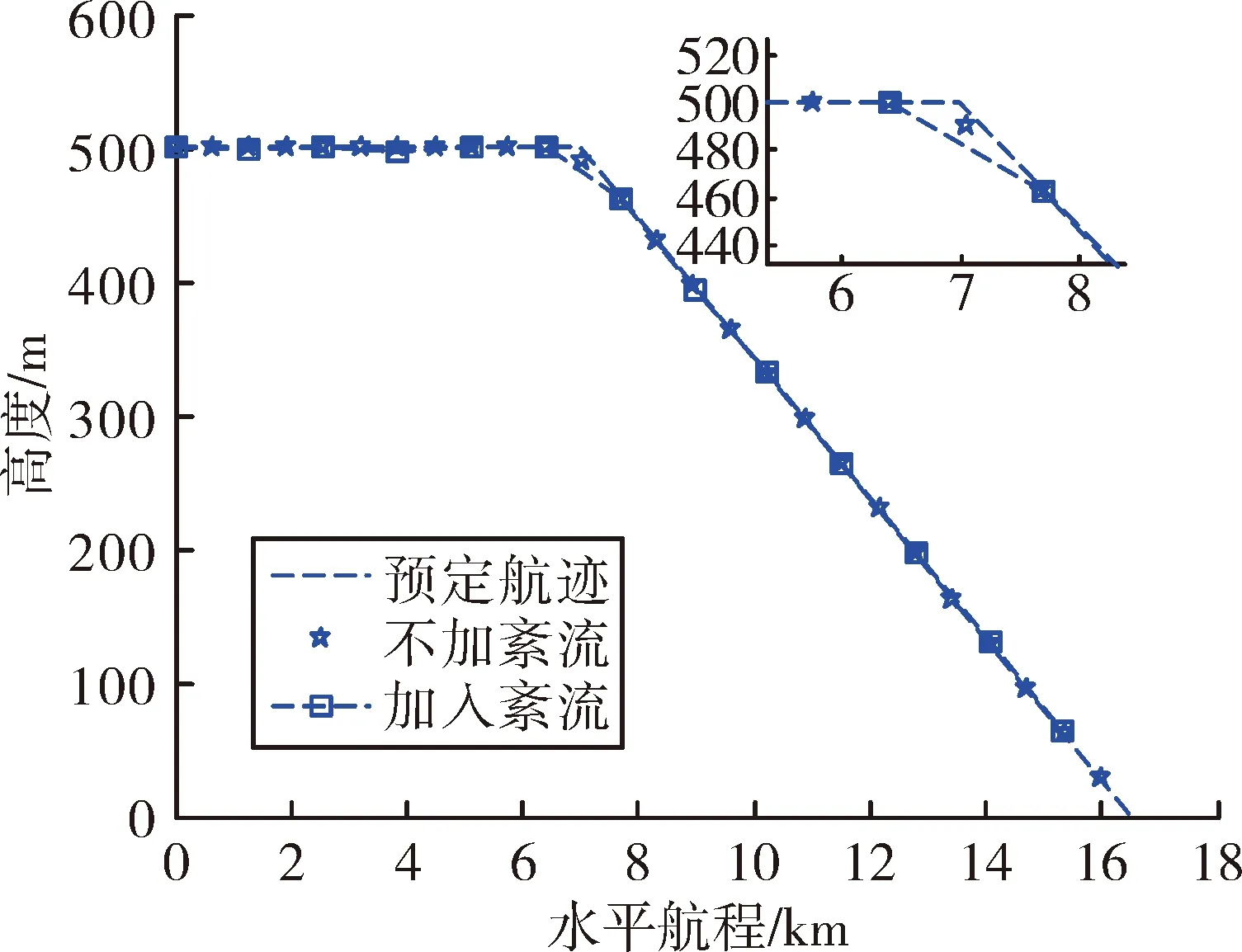
图7 飞机着陆的垂直剖面
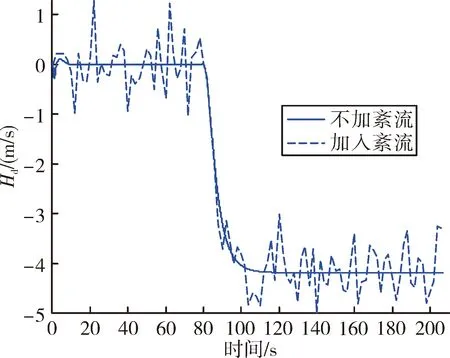
图8 飞机的垂直速率变化曲线
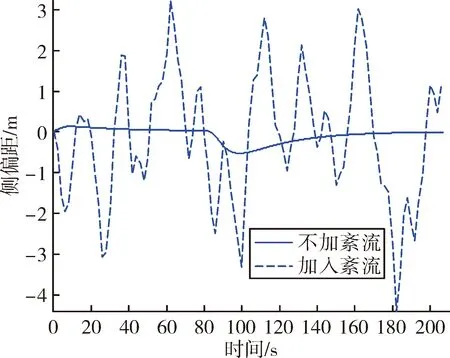
图9 飞机的侧偏距变化曲线
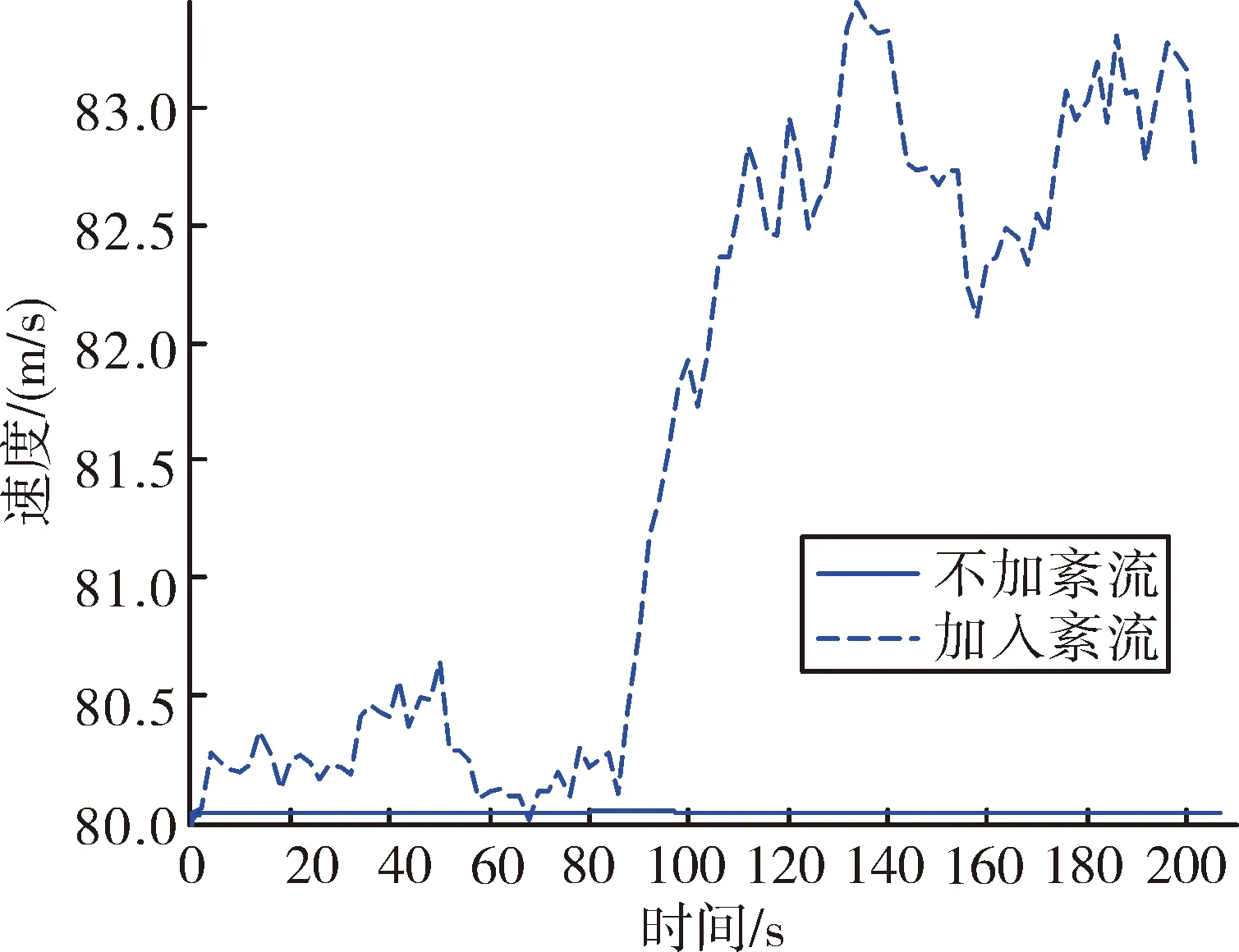
图10 速度变化曲线
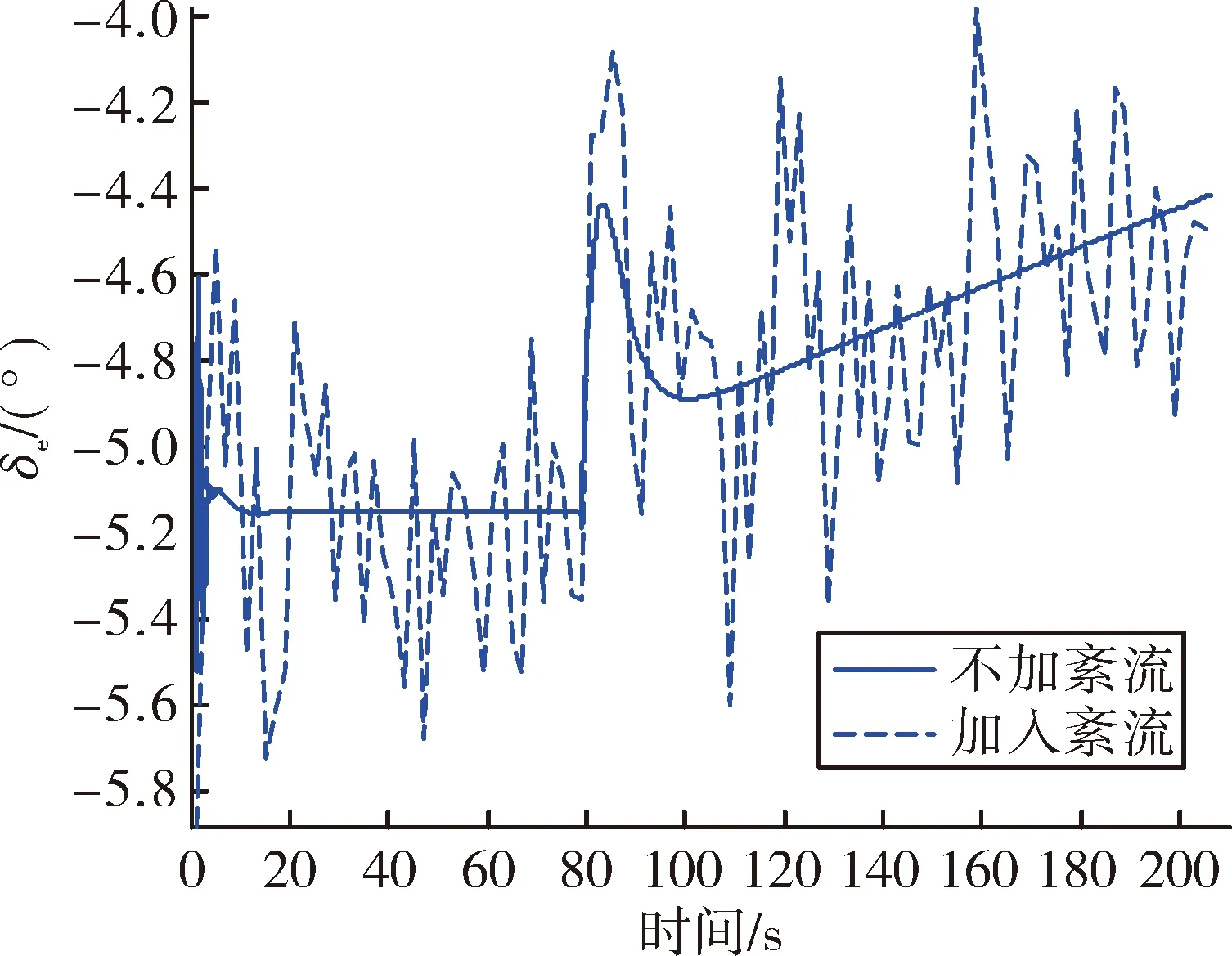
图11 升降舵变化曲线
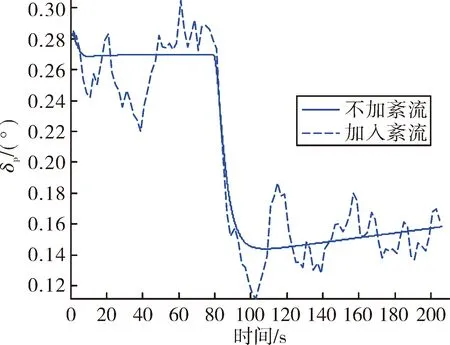
图12 油门开度变化曲线
由上述仿真结果可看出:在没有大气紊流干扰的情况下,飞机着陆控制效果很好,飞机实际的着陆飞行轨迹几乎与计划着陆轨迹几乎重合;飞机与期望着陆轨迹的侧向偏离始终控制在±1 m的范围之内,控制精度很高;飞机与期望着陆轨迹的高度偏差在平飞段和沿3°下滑线下降的过程中控制在±0.5 m之内,只是在下滑道截获的时候,控制律和导引参数进行切换,使得高度偏差突然变大,但是能很快的稳定在±0.5 m内。
当加入中度大气紊流扰动后,飞机的姿态、高度和侧偏距都会产生明显的振荡,这是由于紊流的风速风向时刻在变化,作用在飞机上的力和力矩也因此变化,飞机无法保持姿态稳定,从而影响了着陆轨迹跟踪的稳定性,同时内环的自抗扰控制器估计的扰动加速度实时不同,经扰动补偿后导致舵面偏转较为剧烈;尽管紊流强度很大,姿态和舵面偏转剧烈,除了截获下滑道后切换至沿3°下滑角下滑的这一过程外,所设计的着陆控制律能将飞机的高度偏差控制在±3 m范围内,侧向偏差控制在±5 m范围内,飞机依旧能进行着陆,且与预计的着陆偏差较小,这说明控制律能有效抑制强紊流干扰,既兼顾了系统的动态特性又具有较强的鲁棒性。
仿真条件3:为验证所设计的着陆控制律具有抑制气动参数变化的能力,选配平状态为H=500 m,V=80 m/s的定常平飞状态。飞机先在500 m高度定高飞行,当飞机截获下滑波束后,沿3°的下滑波束中心线下滑直至接地。在仿真过程中加入模型参数的不确定性,主要参数变化范围为±50%。主要参数在随机摄动条件下进行100次蒙特卡洛仿真,仿真结果见图13~图17。
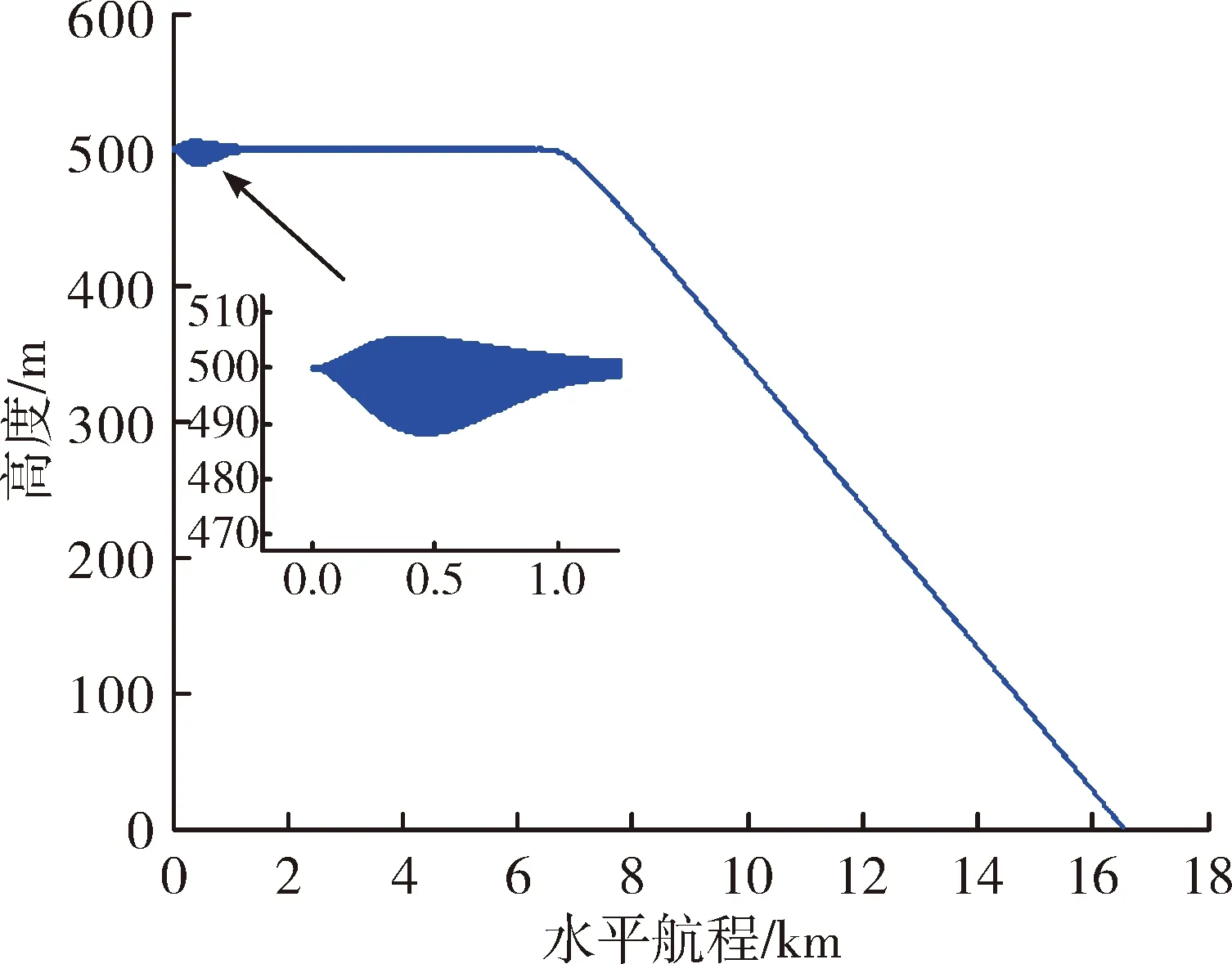
图13 参数摄动下的垂直剖面
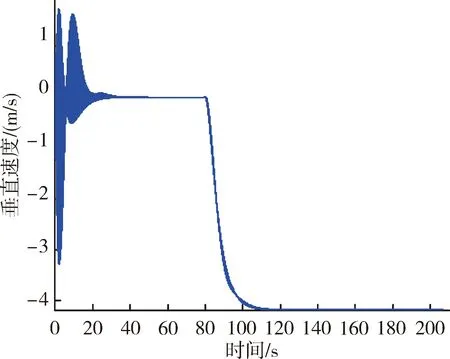
图14 参数摄动下的垂直速率
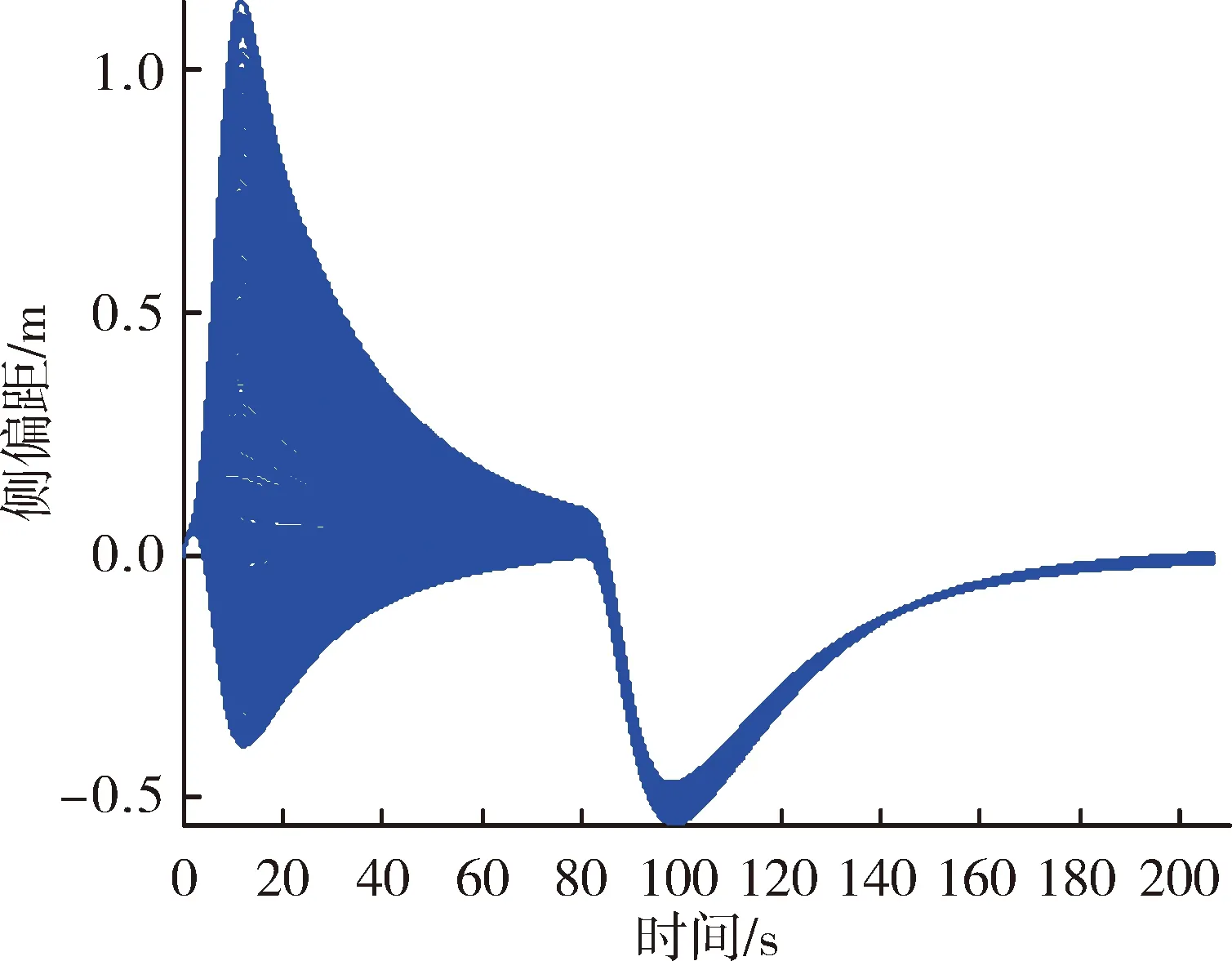
图15 参数摄动下的侧偏距

图16 升降舵偏角变化曲线
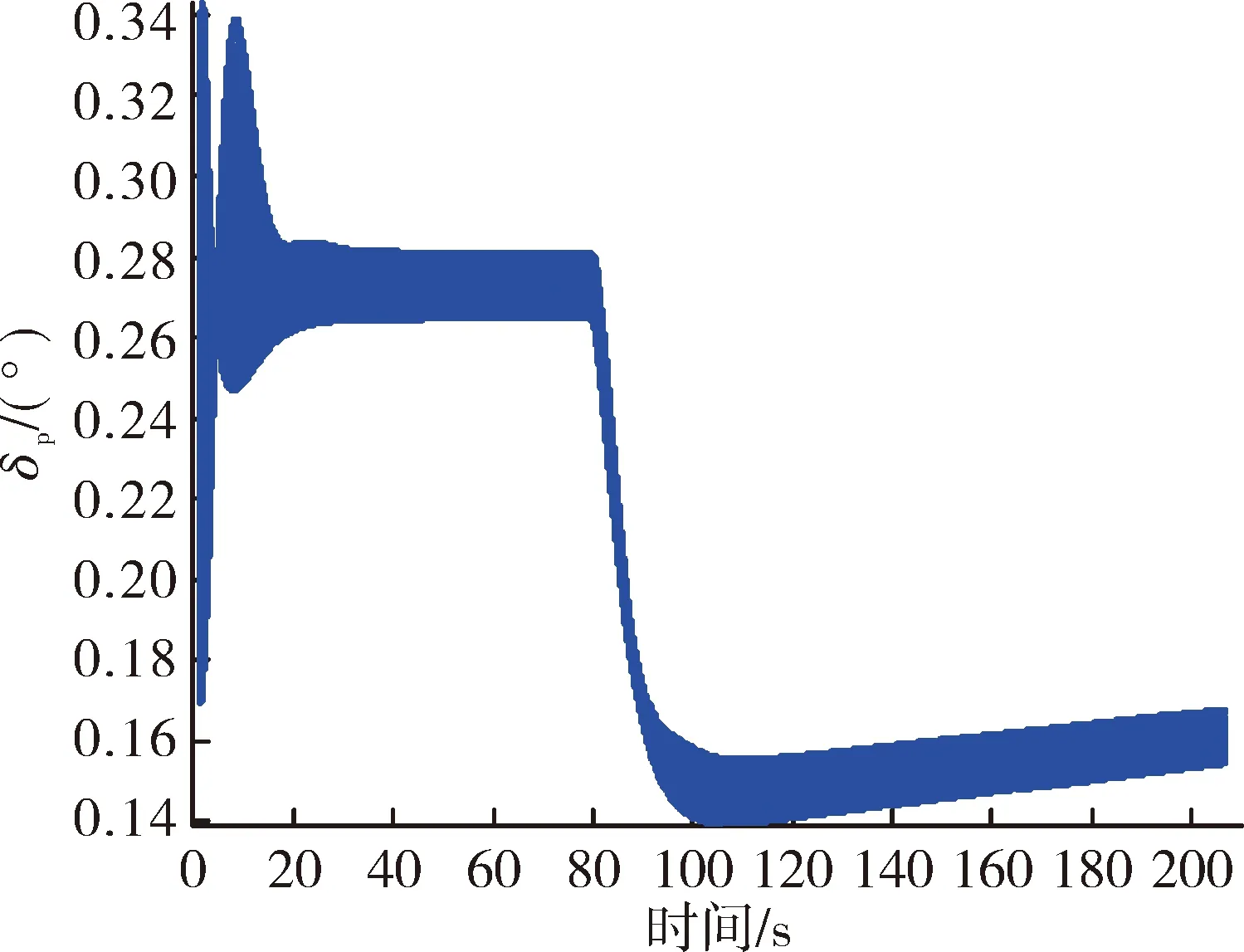
图17 油门开度变化曲线
由参数摄动下的蒙特卡洛仿真结果可知:当飞机的关键参数在摄动范围内随机摄动时,在开始的平飞段对飞机着陆控制有明显的作用,这是因为起始飞机的初始输入和初始状态是基于配平数据的,但参数的变化使得飞机重新配平的输入值和状态值与原来的有所不同,这导致飞机在起始平飞段有所波动,但该波动能迅速减弱到0;升降舵响应变化很大,这是由于每次仿真中,参数摄动导致的扰动加速度不同,扰动变化主要由升降舵变化来体现。总的来看,除起始平飞段,其余时间段高度偏差几乎为0,侧向偏差能控制在±0.6 m之内,飞机能保持很高的精度沿下滑轨迹着陆,控制效果很好,说明所设计的着陆控制律具有很强的鲁棒性,能有效抑制参数摄动带来的不利影响。
5 结论
自抗扰控制方法设计的自动着陆控制律能够根据估计的系统外界总扰动量对控制信号进行补偿,使着陆控制系统具有主动抗扰能力。从设计的姿态控制律和自动油门控制律过程来看,在很大的包线范围内,当飞机遇到外界大气扰动时,或者飞机内部参数发生摄动,自抗扰控制器的参数是不需要变化的,而且能保证很好的控制效果,这表明采用自抗扰方法设计自动着陆飞行控制律能够满足设计要求。
