三轴跟踪平台框架轴的惯量耦合特性研究*
2020-03-30刘艳行
杨 辉,王 明,肖 曦,刘艳行
(1 西安电子工程研究所, 西安 721200; 2 清华大学电机工程与应用电子技术系, 北京 100084)
0 引言
尽管两轴跟踪平台具有体积小、质量轻和控制方法成熟等优点,但由于受框架结构的影响,两轴平台都存在着一个跟踪无法到达的盲区,所以它的应用受到了极大的限制[1-3]。为了使探测器在空域实现对目标的全方位、无盲区跟踪,对导引头三轴跟踪平台进行研究便成了必然趋势。导引头三轴跟踪平台作为一个复杂的光、机、电一体化装置,它的性能通常会受载体扰动、传感器误差及框架间转动惯量耦合等因素的影响[4-5]。
文中基于导引头三轴跟踪平台的组成结构及工作原理对其框架轴的惯量耦合关系进行了建模分析,最后进行了转动惯量的耦合仿真实验。
1 导引头跟踪平台的组成及工作原理
红外导引头跟踪平台是制导武器用于实现探测器视轴稳定和对目标精确跟踪的核心部件,一般由机械支撑装置、框架平面、力矩电机、传感器以及信息处理电路等组成,其组成结构如图1所示。
图1 红外导引头跟踪平台的组成结构
以红外制导原理分析,在导弹的末制导阶段,导引头跟踪平台安装的红外探测器接收到目标辐射的光信号后,先转换成易处理的电信号,再由调理电路进行滤波和标度变换,最后将其送至微控制器进行信息处理。微控制器根据检出的目标位置及姿态误差信息驱动伺服跟踪装置对光学接收部件进行调节,使光轴向着减少目标位置误差的方向运动,从而实现导引系统对目标的角跟踪[6-7]。
2 跟踪平台的框架结构及坐标系定义
三轴跟踪平台的结构如图2所示,包括外框、中框和内框3个转动自由度,外框架固定在载体基座上,中框架固定在外框架上,内框架固定在中框架上,探测器安装于内框架平面上。
图2 惯性跟踪平台框架结构

图3 平台框架各坐标系的相对关系
(1)
(2)
(3)
3 转动惯量耦合特性的建模与分析
定义Jh(h可取为p, m, o)依次表示内框架、中框架、外框架相对于各自坐标系的转动惯量阵。由转动惯量的计算公式可得:
(4)
式(4)中,各分量的计算公式如式(5)所示。
(5)
式(5)中,xh,yh,zh分别为各个框架轴重心到其旋转轴的距离在其坐标系上的投影。
假设各个框架相对各自坐标系均是轴对称的。则式(4)就可以表示为:
(6)
定义Jpy_total表示内框架(包含各类传感器等有效载荷)对其转动轴ooyp的转动惯量,则有:
Jpy_total=Jpy
(7)
中框架的转动惯量由两部分组成:一部分是中框架自身的转动惯量,另一部分是由内框架(包含各类传感器等有效载荷)耦合而来的转动惯量。
定义Jm_total表示中框架的总转动惯量,根据刚体力学的相关理论及前文所定义的框架轴旋转的方向余弦矩阵可得:
(8)

(9)
定义Jmz_total表示中框架(包含内框架及其各类传感器等有效载荷)对其转动轴omzm的转动惯量,则由式(9)可得:
(10)
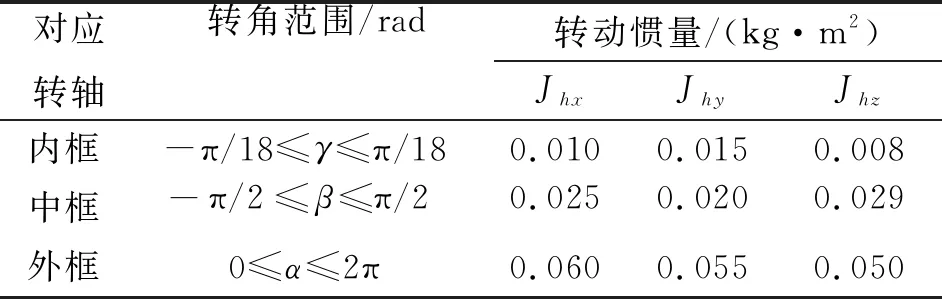
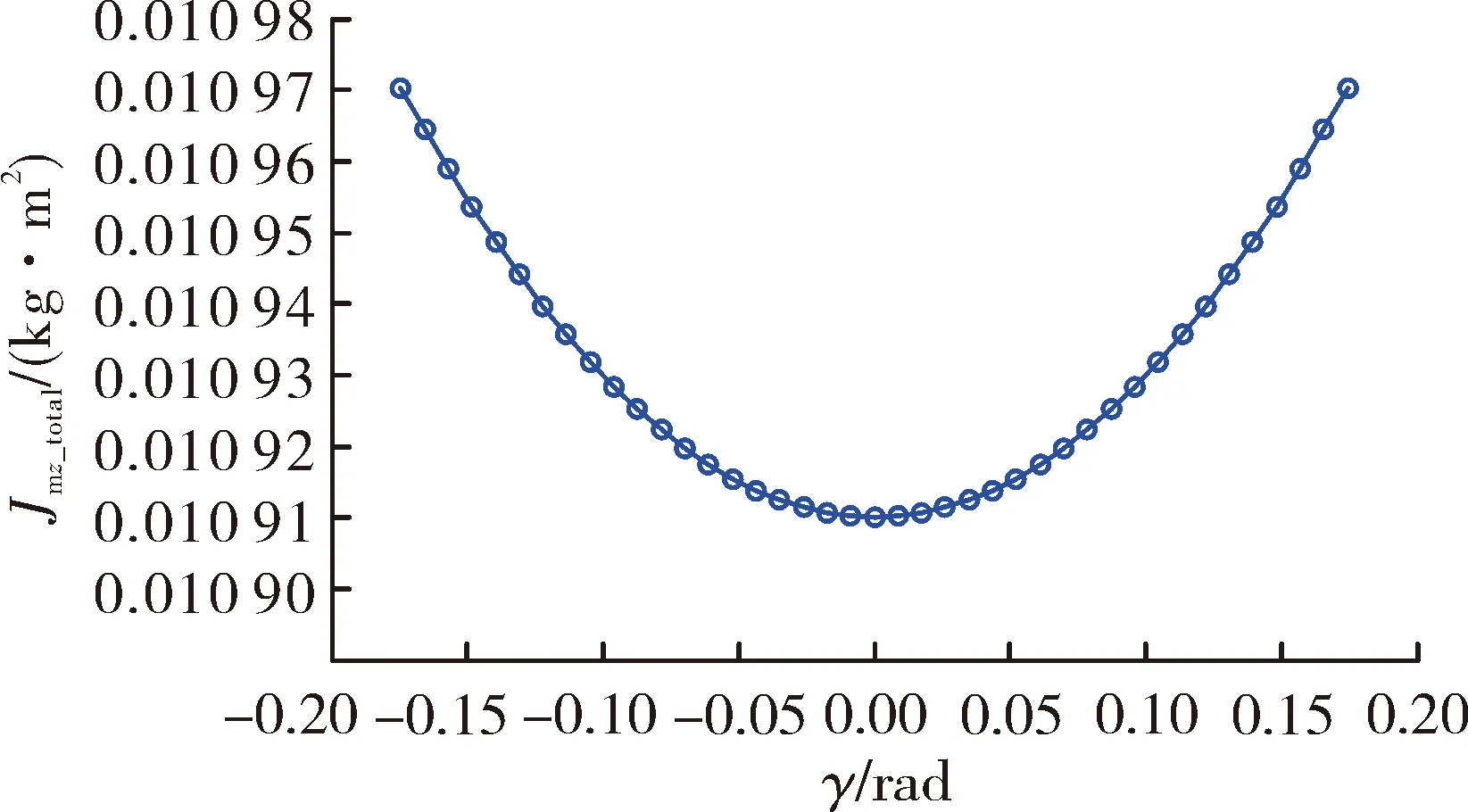
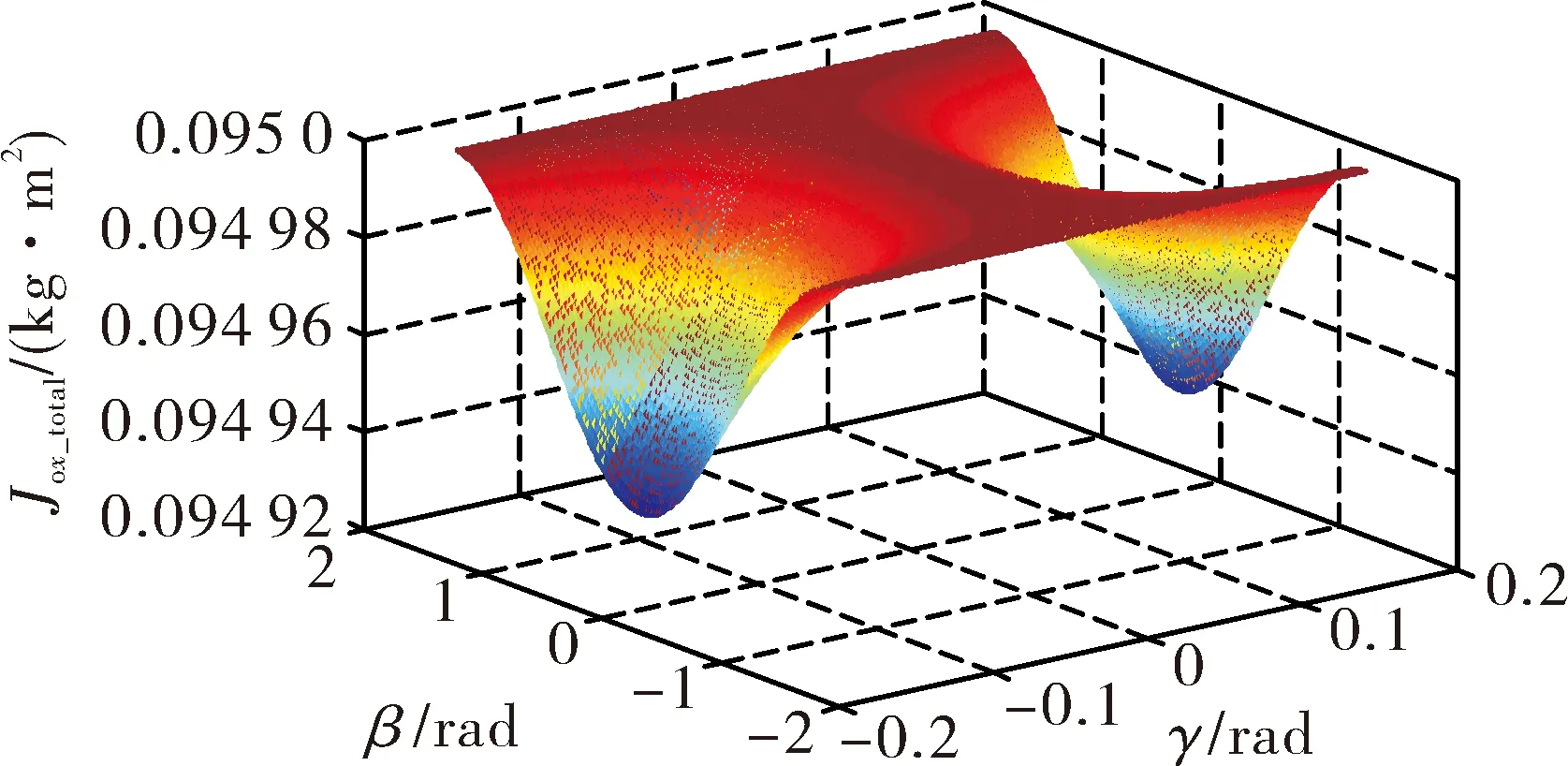
由于所研究的三轴跟踪平台其内框架轴所能转动的范围为-10°~+10°,中框架轴所能转动的范围为-90°~+90°,所以由式(10)可知,中框架绕其转动轴omzm转动时,由内框转角γ所引起的转动惯量耦合到中框架的部分对中框转动轴的影响不大,最大不会超过5%;如果给定各个框架轴自身的转动惯量,那么,当Jpx>Jpz时,中框架轴的转动惯量随内框转角绝对值|γ|的减小而减小,随|γ|的增大而增大;Jpx 外框架的转动惯量由三部分组成:第一部分来自于内框架(包含各类传感器等有效载荷)转动惯量的耦合部分;第二部分来自于中框架转动惯量的耦合部分;第三部分为外框架自身的转动惯量。 定义Jo_total表示外框架的总转动惯量,根据刚体力学的相关理论及前文定义的方向余弦矩阵可得: (11) (12) 式中: Jox_total=Jox+Jmxcos2β+Jmysin2β+Jpxcos2βcos2γ+Jpzcos2βsin2γ+Jpysin2β Jo_xy=Jmxcosβsinβ-Jmysinβcosβ+Jpxcosβsinβcos2γ+Jpzcosβsinβsin2γ-Jpysinβcosβ Jo_xz=-Jpxcosβcosγsinγ+Jpzcosβsinγcosγ 定义Jox_total表示外框架(包含中框架、内框架及其各类传感器等有效载荷)对其转动轴ooxo的转动惯量,可以看出当外框架绕其转动轴ooxo转动时,其转动惯量不仅受内框架轴运动的影响,也受中框架轴运动的影响,然而它们的影响均为二阶小量,所以各自的运动均不会对外框架轴的转动惯量造成大的影响,而且这种微小的影响是可以通过结构优化及其控制方法的设计进行补偿的。还可以看出如果内框架沿其各个方向的惯量分布匀质对称,同时中框架沿其X向与Y向的惯量分布也匀质对称,即同时存在条件Jpx=Jpy=Jpz=Jpp且Jmx=Jmy=Jmm时,Jox_total就可以写成: Jox_total=Jox+Jmm+Jpp (13) 从以上分析过程可以看出:当三轴跟踪平台的3个框架轴同时运动时,除内框架轴绕其自转轴转动的惯量为常量外,外框架及中框架绕各自转轴转动的惯量均不是常量,即跟踪平台框架之间的转动惯量存在耦合,外层框架轴耦合惯量的大小与内层框架轴的转角有一定的关系。因此在设计、加工与装配三轴跟踪平台时,如果能采用先进的生产工艺严格保证三轴跟踪平台的每个框架沿其各个方向匀质对称,并且相对于各自坐标系均是轴对称的,那么就可以使每个框架的转动惯量在其耦合负载框架轴的转角发生变化的情况下仍然保持为常值。 某型号导引头三轴跟踪平台各个框架轴的转角范围和经过计算得出该跟踪平台每个框架相对各自坐标系的转动惯量如表1所示,h对应内、中、外3个框架轴依次取为p、m、o。 表1 各个框架的转动惯量及转角范围 把表1所列转动惯量的值分别代入式(7)、式(10)、式(13)可得: Jpy_total=0.015 (14) Jmz_total=0.0119-0.001cos2γ (15) Jox_total=0.095-0.002cos2βsin2γ (16) 根据表1所列内框架轴的转角范围,由式(15)可以绘出中框架轴的转动惯量与内框架转角γ的关系曲线如图4所示。从图4可以看出,内框架轴的转角γ会对中框架轴的耦合转动惯量产生影响,但影响不大,最大不会超过7×10-5kg·m2。这和第3节的分析结果是一致的。 图4 中框架的耦合转动惯量与内框转角γ的关系曲线 根据表1所列参数,由式(16)绘出的外框架轴的耦合转动惯量与内框架转角γ及中框架转角β的关系曲线如图5所示。从图5可以看出,内框架转角γ和中框架转角β均会对外框架的转动惯量产生一定的影响,但这种影响最大不会超过1×10-4kg·m2。 图5 外框架的耦合转动惯量与内框转角γ及中框转角β的关系曲线 载体扰动、传感器误差及框架间的转动惯量耦合等因素会对导引头三轴跟踪平台的光轴稳定、随动和跟踪造成一定的影响。文中基于导引头三轴跟踪平台的基本组成及工作原理分析了框架轴的惯量耦合关系,最后进行了转动惯量的耦合仿真实验。仿真结果证实:内框架转角γ对中框架转动惯量产生的耦合影响不会超过7×10-5kg·m2;内框架转角γ和中框架转角β均会对外框架的转动惯量产生耦合影响,但影响最大不会超过1×10-4kg·m2。文中的研究为三轴跟踪平台的结构优化和控制系统的设计提供了方法依据。


Jo_yx=Jmxsinβcosβ-Jmycosβsinβ+Jpxsinβcosβcos2γ+Jpzsinβcosβsin2γ-Jpysinβcosβ
Jo_zx=-Jpxcosβsinγcosγ+Jpzcosβcosγsinγ
Joy_total=Joy+Jmxsin2β+Jmycos2β+Jpxsin2βcos2γ+Jpzsin2βsin2γ+Jpycos2β
Jo_zy=-Jpxsinβsinγcosγ+Jpzsinβcosγsinγ
Jo_yz=-Jpxsinβsinγcosγ+Jpzsinβsinγcosγ
Joz_total=Joz+Jmz+Jpxsin2γ+Jpzcos2γ4 框架轴转动惯量的耦合仿真实验
5 结论
