无人机视觉定位与避障子系统研究
2020-03-27林涛
林涛
(1.天津科技大学机械工程学院,天津300222;天津航天长征火箭制造有限公司,天津300462)
0 引 言
无人机是指有动力驱动、机上无人驾驶、能携带多种任务设备、执行多种任务,并能重复使用的航空飞行器,是一种由无线电遥控设备或自身程序控制装置操纵的不载人飞行器[1-3]。由于其成本较低、结构简单、操作控制便利占据了大部分市场,其发展前景备受关注。高精度地定位目标执行任务已经成为无人机的必备技能之一,目前,大多无人机依赖于自带的惯性导航系统和全球卫星定位系统,但二者都无法估计地面目标状态。对于微型无人飞行器而言,增加精度就意味着成本、机身质量上的改变,针对有限的负载和运算能力,目前行之有效的方法即是使用机载摄像机。无人机利用视觉传感器具有不易察觉、信息量全面且准确等优势。
美国麻省理工科学家Robert[4]于20世纪60年代提出了将三维立体场景二维化,使用二维图像解析实现了立体视觉系统的初步形成;奥地利的Christian Zinner等[5]利用携带智能摄像机的嵌入式平台,实现了平台中基于区域的立体匹配算法;法国的S.Kramm等[6]提出了一种基于稀疏的立体视觉和聚类的障碍物检测算法;我国的张博翰等[7]采用双目立体视觉引导电动VTOL飞行器在未知的室内环境下感知和躲避障碍物。
由于基于单目视觉的实时定位与图像处理是当前无人机的视觉定位与避障系统问题研究中的热点,相比基于双目视觉系统的算法或者全景视觉系统的算法,单目视觉系统具有结构简单、计算简便、成本较低等优点。本文主要针对基于单目视觉的视觉定位与避障系统算法展开研究。
1 系统设计方案
六旋翼无人机系统分为机身系统、地面监控系统(PC端通信系统)、实时图像采集处理系统、数据存储系统及飞控的定位系统,系统模块总布局如图1所示。

2 基于摄像机定位的单目视觉算法研究
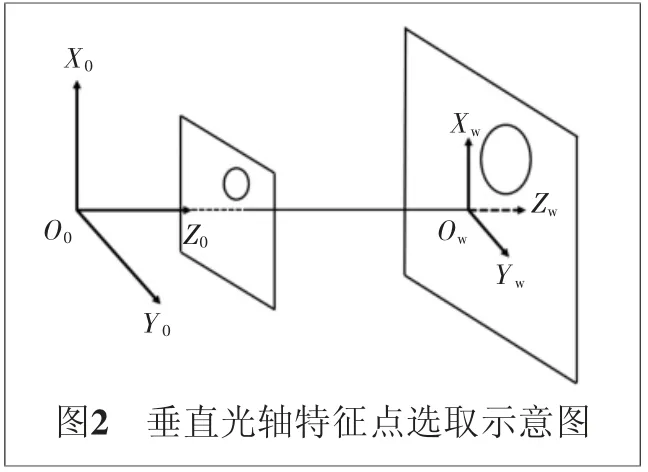
单目视觉实时监测无人机与障碍物的距离,可以为无人机避障的回控系统提供准确的参数依据,以便及时做出判断进行实时避障。无人机垂直光轴方向飞行一定距离,遇到目标障碍物,此时满足条件机载摄像机坐标系与世界坐标系重合,无人机摄像机前后拍摄目标特征点图像如图2所示。
在图像中心建立坐标系,则原点坐标为(x0,y0),此时R=1,T=[0 0 d]T,由此可得
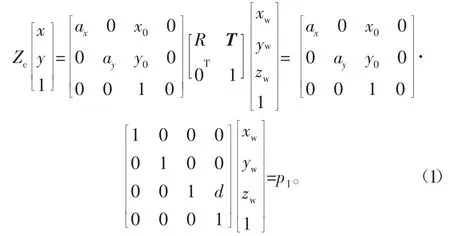
当光轴垂直被测物体时,p1坐标为(xw,yw,0 ),所以又可以得到

由上述公式可得无人机机载摄像机所测的距离,即目标物体到摄像机的距离。
障碍检测判定是指在飞行过程中遇到障碍物判定是否为撞击模型,若为非撞击物则减少绕行导航,提高无人机工作效率。本文将采用以AABB模型为参考的无人机视界区碰撞检测方法。
根据计算出的无人机到物体距离,将无人机真实大小投影到图形平面内。假设摄像机水平视角为α,垂直视场角为β,图像分辨率为m×n(每行像素为m,每列像素为n),无人机长宽的最大值分别为a、b,并通过测得无人机距障碍物距离为d,无人机投影长宽a′、b′在图像像素平面的换算关系如下:

无人机的碰撞检测转化为二维图像相交问题,若障碍物对无人机造成威胁,则图像平面上表现为投影必定相交,且不存在分离轴,如图3所示。

3 基于视觉信息的避障实时规划
通过无人机搭载Phantom 4一体化云台相机平台,DPS处理器完成对MEMS惯性器件、GPS导航定位、CCD传感器等信息实时采集,输出传送至无线设备。
3.1 建立图像模型
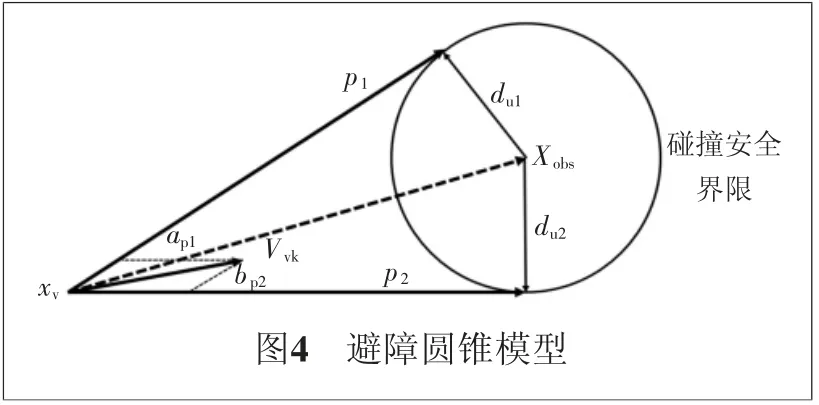
假设无人机与目标障碍之间存在最小的安全距离du2,以障碍物采集的特征点为圆心,以dm为半径建立一个圆锥体模型,即避障圆锥模型,如图4所示。以无人机投影中心为原点构建坐标轴,轴线会与障碍物边缘有交点,选择离光心最近的障碍物边界点为圆心。
3.2 六旋翼无人机避障策略
本文讨论单目视觉的远距离避障问题,所以暂不考虑紧急躲避及复杂环境避让问题。对于正向单障碍物的避障策略如图5所示。
对于无人机避障方向而言,设测得物体在视界区内的投影矩形长宽分别为a、b,整个像素视界区长宽数据为A、B,无人机方向由向量P表示,则根据平行四边形法则可得


3.3 障碍物判定实验
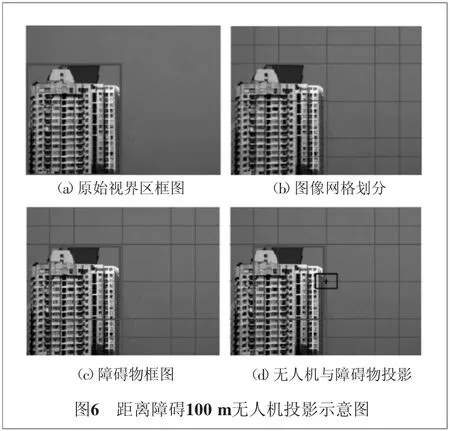
通过图像处理及AABB视界区模型对障碍物的区域锁定,测得的距离将无人机投影至图像中边缘特征点区域,判定是否与障碍物产生交集。无人机在不同场地不同方位实验,其障碍物判定实验结果如图6所示。
本文进行试验测试无人机视界区投影模型是否能准确判断出障碍物进行避障。以上两组试验分别选取距离为160 m的不同方位的目标楼宇障碍进行模拟。在图6(a)展示的是原始视界区中障碍物投影所占面积区域;图6(b)是将视界区进行分区划分后的网格图;图6(c)所示为视界区与障碍区的判定图,在划分网格后障碍物的位姿;图6(d)为无人机根据距离投影在图像上,用于准确判定分离轴的存在,以及是否需要做出避障指挥。
4 结 论
将单目视觉定位测距与避障相结合,利用组合导航系统控制无人机实际飞行距离,通过单目视觉定焦平移算法,实现采集平移图像,通过红外线检测测距,准确得到距离避障信息。
采用AABB视界区碰撞模型实现无人机避障判定。以AABB视界区模型为基础,将无人机与被测目标障碍投影至所需平面,查看投影平面阴影的相交相离等位置关系,做出判断无人机是否进行避障,提高无人机飞行效率,减少一些无用避障导航。
