电动负载模拟器的新型速度全局滑模控制
2020-03-27马小勇杨瑞峰郭晨霞葛双超
马小勇,杨瑞峰,郭晨霞,葛双超
(1.中北大学 仪器与电子学院,山西 太原 030051;2.山西省自动化检测装备与系统工程技术研究中心,山西 太原 030051)
0 引 言
电动负载模拟器是基于实验室条件下的半实物加载以及测试的设备,在航空航天以及地震工程学等学科的研究中起着举足轻重的作用[1-2].文献中研究的负载模拟器主要是在实验条件下,模拟飞行器在飞行过程中舵机承受的各种载荷,以测试舵机性能好坏.负载模拟器对舵机进行力矩加载的同时跟随舵机运动,两者存在一定的耦合作用[3-4],加上实际加载过程中负载模拟器参数扰动,产生多余力矩影响测试效果,而且导致整个系统的动态性能和鲁棒性差.为了提高系统的动态性能和稳定性,近年来,学者们研究出许多控制方法来应用于负载模拟器.
V.Q.Leu[5]提出一种模糊滑模控制策略,利用其不需要对象数学模型的特点消除了系统参数扰动的影响,增强了系统的鲁棒性,但是其控制器参数必须通过反复试凑才能确定.Z.Wang[6]提出自适应解耦同步控制器,为ELS改善补偿性能方面提供了可行的方法.神经网络方法[7-9]和逆模型观测器的应用实现了对ELS的非线性因素估计及等效控制,但是高阶微分特性使计算变得复杂.
H控制[10]和定量反馈理论[11]将执行器的主动运动视为不确定因素来抑制剩余扭矩,但系统误差只能降低到一定程度,而自适应控制[11]动态性能很差.N.Ullah等人将鲁棒控制[12],模糊控制[13]和反推控制[14]与自适应控制相结合来改进ELS加载性能,但工作频宽较大时,其性能不令人满意.此外,基于小波神经网络控制和滑模控制相结合的混合控制器[15]以及一种分数阶自适应模糊滑模控制器[16]位置伺服系统被用于ELS,这些改进结合了多种方法各自的优点,显著提高了系统的鲁棒性,但上述混合控制器完全消除系统错误的能力仍然很有限,并且结构比较复杂,难以实施.
本文提出适用于ELS速度控制带加权积分增益的全局滑模控制(Global Sliding Model Control, GSMC)方法,消除滑动控制的到达阶段,使系统全局具有鲁棒性,在此基础上利用GSMC的速度控制器来提高系统的动态性能和稳定性,并利用Lyapunov函数证明系统的稳定性,利用滑模观测器实现了加载力矩的前馈补偿和速度估计,系统的鲁棒性也得到了加强.
1 ELS的结构及数学模型
1.1 ELS的结构
ELS的结构示意图如图1 所示,采用力矩波动小的直流力矩电机输出扭矩,工控机给电机发出指令进行力矩加载,舵机被迫跟随运动,位置信号和扭矩信号分别通过两个传感器反馈给工控机形成位置闭环和力矩闭环,工控机根据反馈信号继续发出指令直到扭矩达到期望值.

图1 ELS结构示意图
1.2 ELS的数学模型
ELS主要由直流力矩电机、电机驱动器、扭矩传感器三部分组成.
直流力矩电机工作遵循电压平衡方程
(1)
转矩平衡方程为
(2)
式中:Ua为电机输入电压;im为电机电枢电流;Rm为电枢电阻;Lm为电机等效电感;em为电机反电动势;Ke为电机反电动势系数;ωm为电机转速;Te为电磁转矩;Bm为电机阻尼系数;TL为负载转矩,即ELS输出转矩;Km为电机转矩系数;TA为扭矩传感器连接刚度;θ1扭矩加载部分的输出角度;θ2舵机轴的输出角度.
带速度控制器与滑模观测器的电动负载模拟器(ELS)框图如图2 所示.速度控制器为全局滑模控制(GMSC),全滑模控制器为具有全程滑动模态的变结构控制器,在该控制器的作用下,能够消除滑模控制的到达运动阶段,克服了传统变结构控制中到达模态不具有鲁棒性的特点,使系统在响应的全过程中都具有鲁棒性.非线性动态滑模面能实现整个系统的滑模运动,GSMC保证整个ELS系统具有良好的鲁棒性,而加权积分切换增益滑模控制通过引入负的加权积分项来减小系统不在滑动模态时的切换增益,充分降低抖振.实际速度与观测速度之间的误差作为滑模超平面.负载滑模观测器主要对负载转矩进行前馈补偿,保证滑模控制的精度.

图2 ELS系统框图
2 速度滑模控制器的设计
定义误差变量为:x=ωr-ωm,则其状态方程可表示为
(3)
式中:ωr为电机参考转速;ωm为电机实际转速.
联立式(2)和(3)可求得
(4)
2.1 滑模面设计
微分作用能够反映其输入信号的变化速率,因此,将微分环节引入控制系统中,可使系统的输出及早得到修正.因而对于GSMC,设计下列动态非线性滑模面
(5)
式中:c是可变的正整数;f(t)能够保证全局滑模到达滑模面,其需要满足的条件是:
1)f(0)=e(0)+ce(0);
2)t→∞时,f→0;

根据所需要满足的条件,设计f(t)为
f(t)=-λe-at(a>0).
(6)
联立式(5)和(6)可求得
(7)
将式(6)代入条件1可求得
(8)
2.2 趋近律设计
设计趋近律为
(9)

2.3 控制律的设计
由式(4)和(7)可计算得
(10)
所以,由式(9)和(10)可得
ε|ρ|sgn(s).
(11)
进一步可求得其控制律为
ε|ρ|sgn(s).
(12)
采用饱和函数代替符号函数能够明显降低抖振,将饱和函数设计为
(13)
式中:δ比较小且δ>0.
故其控制律可以写为
ε|ρ|sat(s).
(14)
2.4 稳定性分析
对于上述全局滑模控制选择Lyapunov函数V(s)=s2/2进行稳定性分析.并根据式(10)和(12)有
s[-ε|ρ|sgn(s)]≤-ε|ρ||s|≤0.
(15)

3 滑模观测器设计
滑模观测器能够用来观测扭矩值并进行扭矩补偿,减小扭矩扰动的影响,从而提高系统的性能.
3.1 观测器模型
以ELS实际的角速度以及加载力矩TL作为观测对象,滑模观测器模型可以表示为
(16)

(17)
3.2 观测器滑模面及趋近律的设计
滑模面可设计为
(18)
趋近律可设计为
(19)
式中:εω为切换增益;εω<0,此值过大会增加抖振,过小则会增加系统反应时间.
3.3 观测器控制律的设计
(20)
根据趋近律的设计,可求得控制律
(21)
4 仿真验证
所建立的负载模拟器(采用直流力矩电机)相关参数如下:
电枢绕组电阻Rm=1.14 Ω; 电机等效电感Lm=0.02 H; 电机等效转动惯量Jm=0.18 kg·m2; 粘滞摩擦系Bm=0.232.电机电磁转矩系数Km=21.7 N·m/A;反电动势常数Ke=12.5 V/rad/s;机械连接刚度TA=550 N·m/rad.


图3 普通滑模速度控制器10 Hz正弦响应
由图3 可得,在进行10 Hz正弦波力矩加载时,普通速度滑模控制跟踪曲线的峰值在18.8 N·m 左右,按照峰值计算跟踪误差为6%左右;由图4 可得,采用本文方法跟踪曲线的峰值在19.4 N·m 左右,按照峰值计算跟踪误差为3%左右.由图5 可得,在进行20 Hz正弦波力矩加载时,普通速度滑模控制跟踪曲线的峰值在18.2 N·m 左右,按照峰值计算跟踪误差为9%左右;由图6 可得,采用本文方法跟踪曲线的峰值在19.2 N·m左右,按照峰值计算跟踪误差为4%左右.因而本文设计的速度控制器能使ELS更快更有效地消除加载力矩与参考力矩之间的误差,提高了ELS的稳定性和动态响应性能,鲁棒性也得到了提升.但是两种控制器进行加载实验时,随着频率的增加,两者之间的误差会在一定程度上增大,且会增加消除时间.

图4 本文滑模速度控制器10 Hz正弦响应

图5 通滑模速度控制器20 Hz正弦响应

图6 本文滑模速度控制器20 Hz正弦响应
不带速度滑模观测器时进行力矩阶跃信号加载,仿真可得图7.
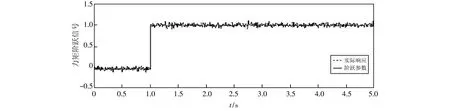
图7 力矩阶跃加载响应
由图7 可看出,在没有滑模观测器的情况下,加载力矩有较大的振荡,ELS基本无法实现对力矩的跟踪,所以为了提高ELS的性能,滑模观测器必不可少.
5 结 论
本文提出了一种用于ELS的带加权积分切换增益GSMC的新型速度控制器,有效地减小了SMC中所存在的抖振问题,实现了更高的加载响应精度以及对于速度的良好跟踪.同时设计了滑模观测器,实现加载力矩的前馈补偿,增强了系统的鲁棒性.通过与传统滑模速度控制器的比较分析,证明了该方法的有效性,提高了ELS系统的稳定性和动态性能.本文不足之处在于滑模控制抖振问题依然是影响实验结果的重要因素,因而响应精度仍然有待提高.
