同面多叉指电极结构的电容式三维力触觉传感器设计
2020-03-26苑子鹏
孙 英,刘 非,翁 玲,陈 铮,苑子鹏
(1.河北工业大学省部共建电工装备可靠性与智能化国家重点实验室,天津 300130;2.河北工业大学河北省电磁场与电器可靠性重点实验室,天津 300130)
0 引言
人类可以通过触觉识别物体纹理、感知物体温度和接触力大小等信息。越来越多的科研人员都开始了对触觉信息的研究,触觉传感器现已成为仿生机器人领域研究的热点[1-2]。
根据工作原理的不同,触觉传感器可以分为压电式、光学式、电感式、压阻式以及电容式等[3-7]。其中,电容式触觉传感器因其工作范围广、灵敏度高、温漂低等优点,是研究人员研究的热点[8]。现存的电容式触觉传感器大多采用上下电极板平行的常规电容器结构,通过改变电容器上下极板的间距或重叠面积来改变传感器的输出电容从而实现对单向力或三维力的识别检测[9-10]。这种常规结构的电容式触觉传感器虽然模型简单,但不适用于表面曲率较高或变形较大的场合。同面电极结构的电容式触觉传感器由于没有上浮电极,降低了传感器制备的复杂性,很容易实现传感器的阵列化[11]。
黄英等提出了一种同面多电极结构的电容式触觉传感器[11],能够实现0~10 N范围内的三维力检测,但由于电极结构简单,传感器的初始电容和灵敏度均不高。张淑艳等设计了一种可用于滑觉检测的同面电极式电容触觉传感器[12],该传感器灵敏度高,但同样存在初始电容低的问题,且测力范围只有0~100 mN。Y. Zhang等基于同面电极结构设计了一种可免疫寄生电容的触觉传感器[13],该传感器分别采用金和超级电容器的固态电解质作为电极材料和介质层材料,灵敏度极高。
为进一步提高同面电极电容式触觉传感器的灵敏度和初始电容,在尽量制备简单和制备成本较低的情况下,本研究采用同面多叉指电极作为传感器的电极结构,空气和PDMS(聚二甲基硅氧烷)共同作为传感器的介质层,利用电场的边缘效应,通过改变介质层的等效介电常数改变传感器输出电容,进而通过4个电容单元电容值的不同变化实现三维力检测。
1 传感器结构设计与原理分析
1.1 传感器结构设计
传感器的三维结构剖分图和尺寸参数如图1所示,最上层为棱台结构的触头层,由PDMS制得。中间层为倒凹槽结构的介质层,凹槽本体由PDMS制得,凹槽内部充斥着空气。最底层为传感器的电极层。

图1 传感器结构示意图
电极层包括1个公共叉指电极和4个感应叉指电极。如图2所示,4个感应叉指电极环绕在公共叉指电极的四周并与其形成4个基本叉指电极单元,这4个叉指电极单元可等效为4个电容。叉指电极的叉指宽度和叉指间距均为0.5 mm。
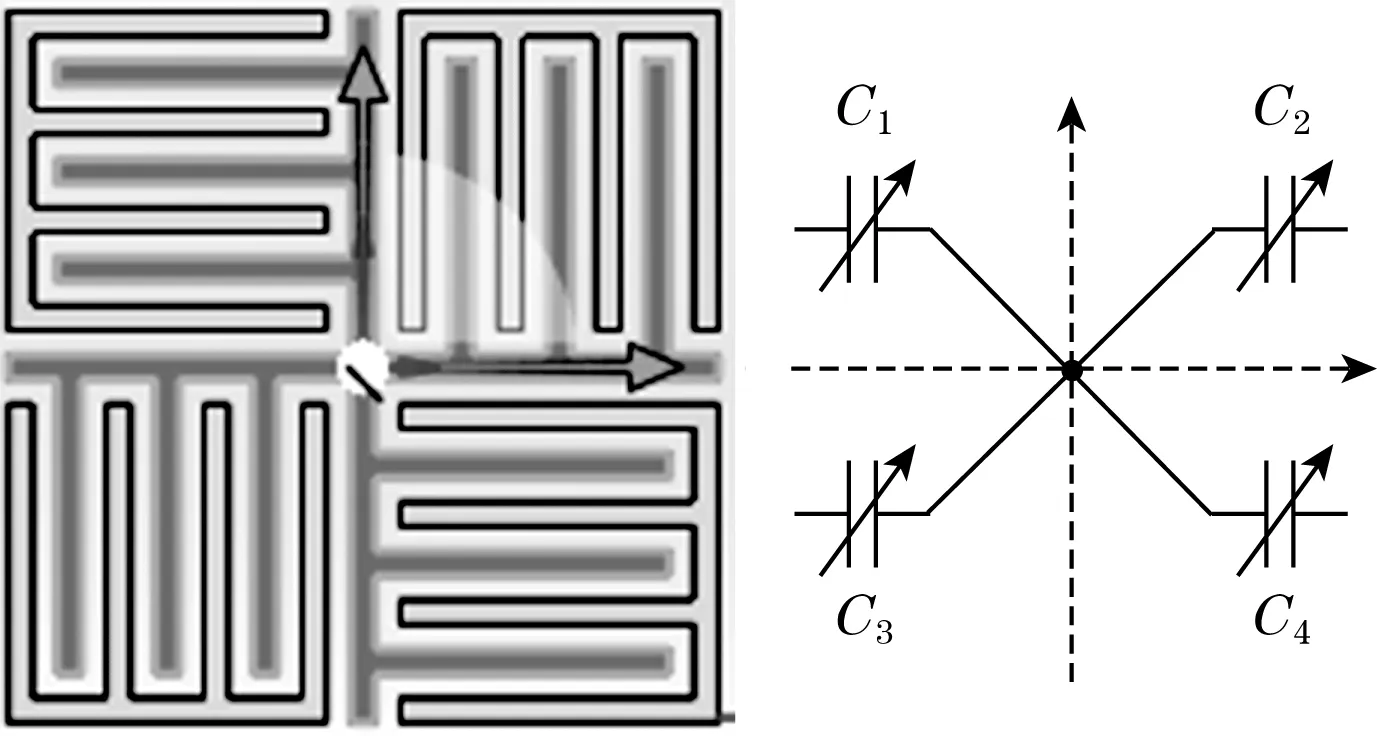
图2 同面多叉指电极结构及其等效电路
1.2 传感器工作原理分析
基本叉指电极单元由两个梳状结构的电极相互交叉放置形成。分别对两个梳状结构的电极施加正负电压,则电场线将会以图3所示由正极指向到负极。叉指电极表面的电场主要存在的区域可称为电场敏感区,h为电场敏感区的高度且满足下式[14]:
(1)
式中:s为叉指宽度;w为叉指间距;λ为叉指带宽。
位于电场敏感区的材料会影响电容单元的电容值。
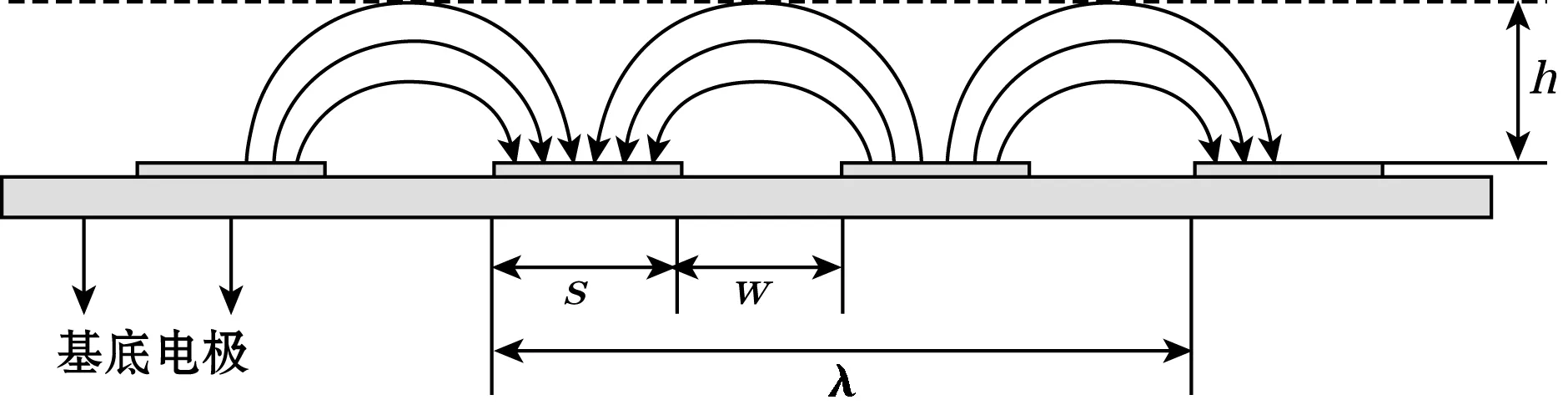
图3 同面叉指电极侧视图
图4为基本叉指电极单元的电容等效电路[14],正负电极中垂线处电势φ=0。对于叉指数为N的电容单元,其电容值Ctot为:
(2)
式中:CI为内部电容;CE为外部电容。
内、外部电容均可以通过式(3)求出:
C=ε0·εr·f(η,h,λ)
(3)
式中:ε0为真空介电常数,ε0≈8.85×10-12F/m;εr为相对介电常数;f(η,h,λ)为与η、h和λ有关的函数,η为金属化率。
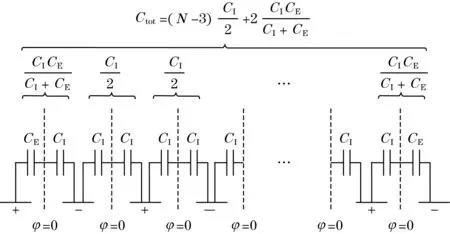
图4 基本叉指电极等效电路
当叉指电极的尺寸确定后,f(η,h,λ)为定值,CI和CE均与εr正比,则Ctot与εr正相关。

图5 传感器受力形变示意图
在所设计的传感器中,空气层高度等于电场敏感区高度h。不受外力时,εeq≈εair=1,空气的相对介电常数即为传感器的等效介电常数。如图5所示,当对传感器施加法向力时,PDMS层整体被压缩,从而进入到电场敏感区,由于PDMS的相对介电常数大于空气的相对介电常数,所以等效介电常数将变大,即εeq>εair=1,4个电容单元的电容值增大。当对传感器施加切向力时,沿切向力方向一侧的PDMS层被压缩,故该侧的两个电容单元的电容值增大。而沿切向力反方向一侧的介质层被拉伸,空气层高度变大,电场敏感区内仍为空气,故该侧的两个电容单元的电容值由于等效介电常数不变而保持不变。
2 有限元仿真分析
2.1 电极表面场强仿真分析
根据高斯定理和电容定义式可知:
(4)
式中:Q为封闭曲面∂V内的电荷量;U为激励电压;E为电场强度。
由式(4)可知,电场强度的分布与电容值的大小密切相关。故分别对叉指电极和普通双同面电极的场强分布进行仿真分析。
分别建立二维叉指电极模型和普通双同面电极模型。对于叉指电极:设置s=w=0.5 mm,N=8。对于普通双同面电极:设置s=1 mm,w=0.5 mm。仿真结果分别如图6和图7所示。
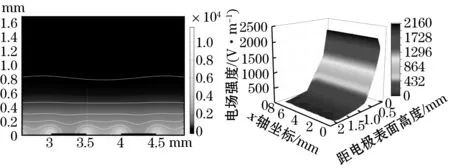
图6 同面叉指电极场强分布

图7 普通双同面电极场强分布
由图6可知,叉指电极的电场敏感区主要集中在距电极表面1 mm以内的区域,基本满足式(1)。距离电极越近,场强越大,场强变化越大。所以当传感器受到的力越大时,介质层中的PDMS层就越接近电极,电容的变化就会越大。
由图7可知,普通双同面电极的电场分布较分散,两电极中垂线附近的区域场强较大,而其他区域场强较小。若介质层的形变发生在场强较小的区域,则传感器的电容值的变化也会很小。
通过比较图6和图7的两种电极结构下的场强分布可以看出,叉指电极具有将电场“聚集”的功能,使传感器工作区域内的电场强度比普通双同面电极要大很多,由式(4)可知,传感器的初始电容值便会更大,且灵敏度更高。
2.2 传感器整体建模与仿真分析
根据前面的设计,对传感器进行分层建模,集成封装,建模结果如图8所示。
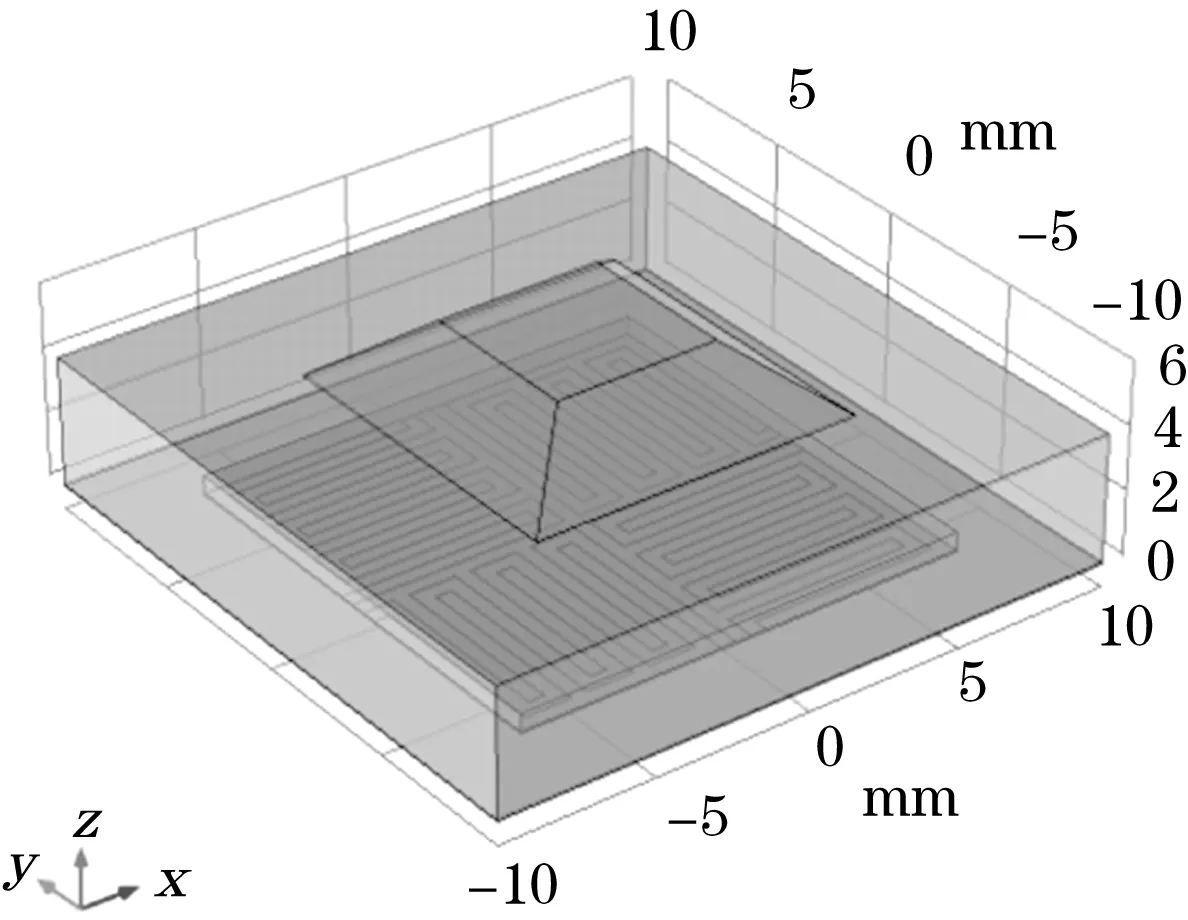
图8 传感器建模仿真
对传感器各层材料进行参数设置时需要注意:
(1)触头层杨氏模量的参数设置应较大。当有外力施加在触头层时,外力将对触头层做功,所做的功一部分用于触头层的形变,另一部分用于触头层的位移。由于触头层的主要作用是将外力传递到介质层,所以触头层受到外力时所发生的形变要小,以减小力在触头层的损耗,这就要求PDMS触头层的杨氏模量较大。
(2)介质层杨氏模量的参数设置应适中。受到外力时介质层的形变直接导致输出电容的变化,所以介质层的杨氏模量直接影响了传感器的灵敏度,杨氏模量越大,介质层在外力的作用下形变量越小,输出电容越小,灵敏度越低;同理,杨氏模量越小,灵敏度越高。为了保证传感器的灵敏度和稳定性,PDMS介质层的杨氏模量应适中。
传感器各层的材料具体参数如表1所示。
2.2.1 传感器受力形变分析
图9(a)和图9(b)分别为在10 N法向力和10 N切向力作用下的传感器形变图。可以看出,在法向力作用下,PDMS层整体被压缩。在切向力作用下,PDMS层一侧被压缩,另一侧被拉伸。
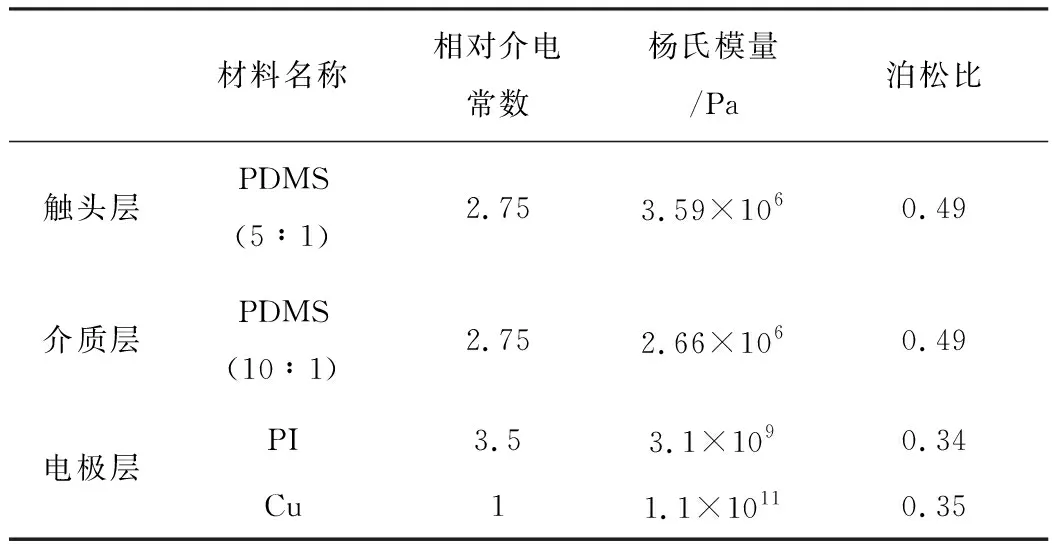
表1 传感器各层材料属性

(a)(b)图9 传感器受力形变图
2.2.2 法向力作用下的传感器输出电容特性
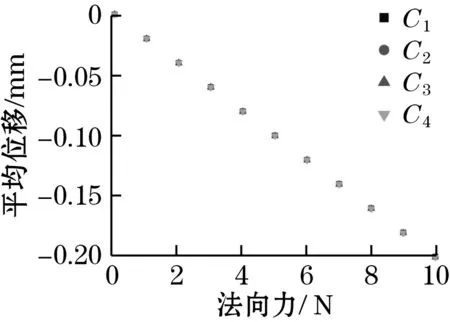
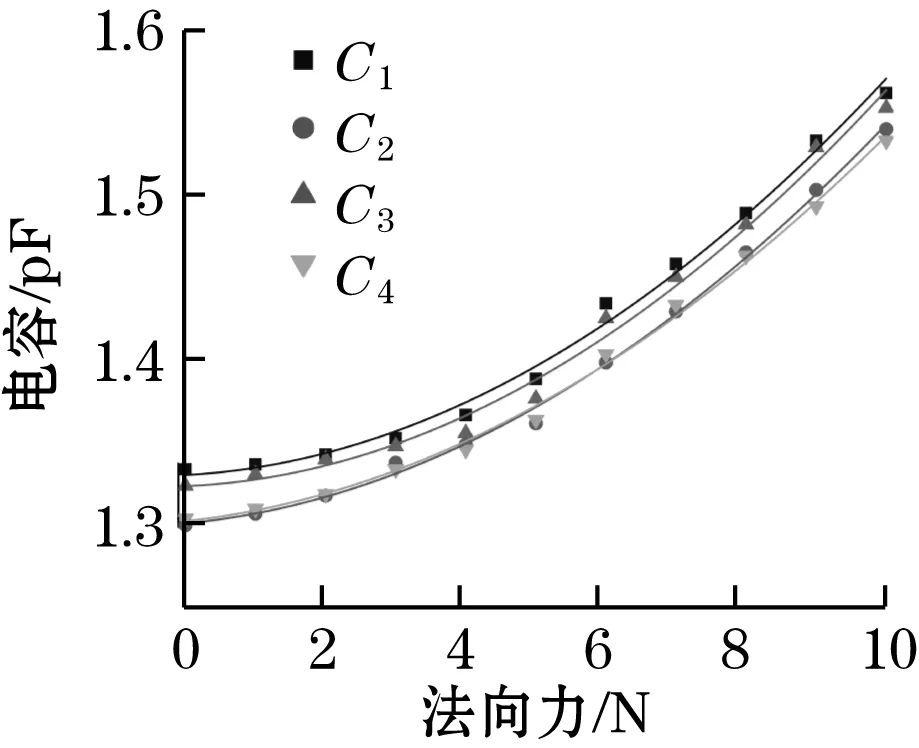
对传感器触头层施加渐增的法向力,力的步长为1 N,范围为0~10 N,传感器输出特性如图10所示。随着法向力的增加,4个PDMS介质层单元下表面的平均位移线性增大,4个电容单元的电容值指数增大。
2.2.3 切向力作用下的传感器输出电容特性
对传感器触头层施加渐增的切向力,步长为1 N,范围为0~10 N,传感器输出特性如图11所示。随着施加的切向力增加,2个PDMS介质层单元下表面的平均位移沿z轴负方向线性增大,另外2个沿z轴正方向线性增大。沿z轴负方向形变的2个电容单元电容值指数增大,而沿z轴正方向形变的2个电容单元电容值先是微弱减小,后基本保持不变。这是因为在距电极表面1~1.2 mm的区域,仍有微弱的电场存在,而施力初期,这两个电容单元的形变较小,其电容值会因为微弱电场的存在发生微小的改变。随着施加力的增大,这两个电容单元的形变也开始增大,从而使PDMS层真正意义上远离电场敏感区,所以其电容值将保持不变。

此外,传感器4个电容单元的初始电容值略有不同,这是4个叉指电极单元结构不对称以及网格剖分差异所带来的。
3 实验测试与分析
利用3D打印、柔性电路板制造等技术对所设计的触觉传感器进行制备,实物如图12所示。

图12 传感器实物图
图13为传感器测量平台示意图,将推拉力计安装在测试架上,通过移动测试架上的x、y和z轴平台可以测量法向力和切向力的大小,其分辨率为0.01 N。阻抗分析仪(型号KEYSIGHT E4990)用于电容的测量。
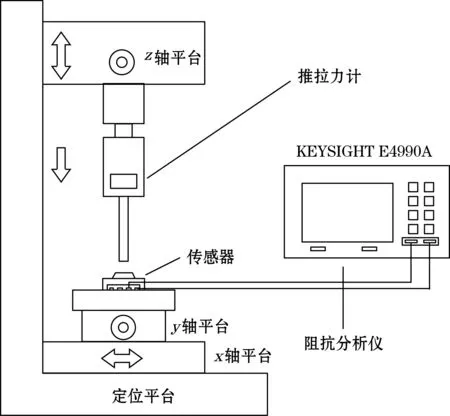
图13 实验测试平台示意图
利用传感器测量平台对触觉传感器进行测量标定。通过移动z轴平台对传感器施加法向力,范围为0~10 N,增量为1 N,记录一组11个实验数据。重复此流程5次,并对实验数据取平均值。通过移动x或y轴平台对传感器施加切向力,其他过程同施加法向力的实验,实验结果如图14所示。
由图14可知,随着施加的法向力增大,4个电容单元电容值变化趋势基本仿真一致,呈指数增大;随着施加的切向力增大,2个电容单元的电容值呈指数增大,另外2个基本保持不变,总的变化趋势与仿真相同。
当施加的法向力和切向力均为5~10 N时,传感器的灵敏度较高,分别达到0.023 1 N-1和0.013 4 N-1。传感器在0~10 N范围内法向、切向的平均灵敏度分别为0.018 6 N-1和0.010 3 N-1。与文献[11]所设计的传感器相比,灵敏度提高了约1倍。4个电容单元的初始电容值也有较大幅度的提升,从而提高了传感器的信噪比。
4 结论
本文提出了一种同面多叉指电极结构的电容式三维力触觉传感器,通过仿真和实验验证,该传感器能够有效地提高同面电极结构电容式触觉传感器的灵敏度和初始电容,实现了0~10 N内三维力的检测,可用于机器人灵巧手或人造皮肤等领域。但此结构尺寸仍较大,后期需对传感器结构进行优化,且需要设计一种更加精确的微电容采集系统以减小杂散电容对测量结果的影响。