手持GPS接收机三参数的应用与分析
2020-03-26张桢哲
张桢哲
(宝鸡西北有色七一七总队有限公司,陕西 宝鸡721012)
在地质勘查工作中,不管是进行工作区内控制点的外业踏勘,还是进行地质填图工作,或者小比例尺土壤采样工作。有时会使用到手持GPS接收机坐标采集或定位。因为手持GPS接收机,有着体积小,携带方便,定位速度快,而且可以满足全天候的工作的特点,被广泛应用在很多方面。它可以采集工作区内的已知点的WGS-84坐标(B、L、H),然后和已知点的高斯平面直角坐标,利用计算机内的坐标转换软件,快速的计算出该点的三参数输入手持GPS接收机内,然后方便快速的采集坐标点位或者进行坐标的放样。每个工作区可能它的坐标系统不一样,有的也许是北京54坐标系,有的也许是西安80坐标系,或者是施工独立坐标系。目前我们国家现阶段采用是CGCS2000坐标系[1]。不管是哪种坐标系统,因为手持GPS接收机采集的是WGS-84坐标系,因为采用的坐标系统和坐标基准和实际工作区内的坐标基准不一致,所以在使用手持GPS接收机进行作业前,首先需要将坐标基准进行统一。
1 GPS定位原理
我们知道GPS能够快速的采集地面点的三维坐标数据。下面我们首先了解下GPS的工作原理。GPS全球导航定位导航系统一般三个部分组成,分别如下:空间卫星部分、地面数据处理部分及用户设备三部分组成。GPS空间部分由24颗卫星构成,它们在一定的轨道绕地球旋转,由6个轨道,每个轨道4颗卫星组成[2,3]。这样使得无论任何时刻,在任何地点都可以观测至少4颗卫星,同过距离交会对地面点进行定位。地面部分由主控站、注入站和监控站组成。监控站通过不间断的接收卫星信号,来监测卫星的工作状态。主控站通过各个监控站对GPS的观测数据,计算出卫星的各种参数进行改正,然后同过注入站向卫星发布命令。
2 手持GPS接收机应用
手持GPS接收机采用的是单点定位,我们知道GPS的误差主要是分为卫星部分误差、信号传播误差、接收机的误差以及其他误差。由于手持GPS接收机在接收卫星信号的时候,并未进行的差分的改正,所以精度较低,可以作为地质填图或者小比例的物化探采样工作[4]。一般在平原里区平面定位精度误差为2m左右,中午时卫星数少,可能会对精度略有影响。
2.1 手持GPS接收机的参数
手持GPS接收机的参数分为DX、DY、DZ、DA和DF,前三个参数需要在实际工作中计算,也就是我们通常所说的三参数,而后两个参数(DA和DF)在对于某一个坐标系统来说,它的数值可以认为是固定不变的,例如在北京54坐标系统中△A=-108、△F=0.0000005,在西安80坐标系统中△A=-3、△F=0。
2.2 参数计算方法
手持GPS的参数计算,无非是利用公共点的两套坐标计算坐标转换参数,通过手持机内置的软件,对采集的WGS-84坐标进行转换得到需要的测区坐标系统。通常的参数计算方法有三参数法和七参数法以及高程拟合法,下面分别加以说明。
2.2.1 三参数方法
三参数法是在测区的控制点上采集该点的WGS-84坐标并利用已有控制点的坐标进行计算获取DX、DY、DZ的平移参数,它的精度比较低,没有考虑到尺度变换因子。原理是将公共点的坐标转换成空间直角坐标,进行简单的平移,计算转换参数,转换的模型如下:
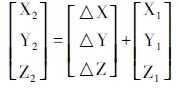
转换模型中,X1,Y1,Z1和X2,Y2,Z2分别为某一点在两个不同坐标系中的坐标,ΔX、ΔY、ΔZ某一点从一个坐标系转换到另一个不同坐标系平移参数,这套坐标转换模型只需要一个公共点就可以计算三参数。
2.2.2 七参数法
七参数法是分别在工作区的3个控制点上采集WGS-84坐标和已有控制点的坐标进行计算,得到3个平移参数、三个旋转参数和1个尺度参数,转换模型为布尔沙模型,如下图:
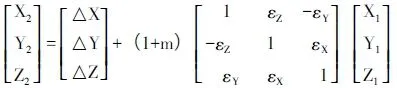
式中X1,Y1,Z1和X2,Y2,Z2分别为某一点在两个不同坐标系中的坐标,ΔX、ΔY、ΔZ为平移参数,εX、εY、εZ,为旋转参数,m为尺度参数。七参数法至少需要三个公共点进行坐标转换,用最小二乘法进行约束平差,来便于提高局部范围内的参数求解精度[5]。由于七参数转换模型比三参数进行转换更严密精度更高,而采用低精度公共点的坐标求得的转换参数,会对观测精度有较大影响,大范围内进行坐标转换时,随着测点与公共点之间距离增加,误差逐渐增大。
2.2.3 GPS高程拟合
GPS的高程拟合就是利用手持机测定的大地高通过计算高程异常来得到正常高的方法。这就需要的到公共点的水准高程通过公式H=h+ζ(H为大地高、h为正常高、ζ为高程异常)。高程异常也可以通过对似大地水准面的拟合来得到,在水准面精华模型中,通过内插法可以得到各点的高程异常值。
3 工程应用
本次项目工作区位于青海省中部柴达木盆地,属于青海省地质勘查项目。主要任务是进行1:10000土壤地球化学采样工作。测网的密度100m×20m,测线方位0°,共布设测线40条,面积约5平方公里共计约51.8公里。
3.1 WGS-84坐标采集
本次工作采用Garmin eTrex 20手持GPS接收机,定位精度2m~5m采集工作区内至少三个控制点的WGS-84坐标,点位应均匀分布,采集坐标时应将GPS接收机静置在点位5分钟~10分钟。具体操作为,在坐标采集前,首先将要把手持GPS的坐标系统设置为WGS-84坐标系下,并读取经纬度(B,L,H),然后将手持GPS接收机放置在已知的控制点上,等待数据读数稳定后读取坐标值。
3.2 参数计算
七参数的模型比三参数的模型计算更加严密精确,误差更小。由于本次测量任务野外测点采样的精度要求不是太高(平面定位误差在5m~10m之内),所以采用三参数法进行坐标转换。
首先在计算三参数前,应首先输入本地的中央子午线,并且设置好椭球参数和坐标系统,将采集的WGS-84坐标和本地高斯平面直角坐标分别输入参数计算软件,即可得到工作区的三参数[6]。将得到的三参数输入手持GPS内,到另一已知控制点上进行点位的检校,如果残差满足精度要求,即可进行点位坐标的采集。采集三个点计算的三参数下:
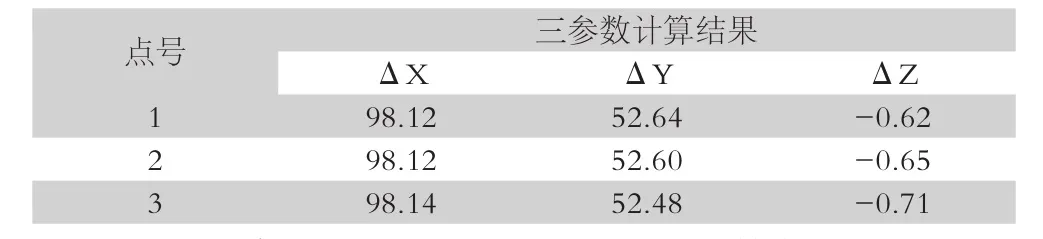
表1 三参数的计算结果
这里需要注意的是GPS的三参数不是固定不变的,不同的地方,不同的计算方法计算出来的三参数是不一样的。而且在某一个点上计算的三参数,如果里这个点越远,GPS的定位精度越差,在距离测区20公里以外的某已知点上,三参数分别为ΔX=98.39,ΔY=51.88,ΔZ=-1.16,所以最好选择测区周围均匀分布的3个已知点,进行三参数的计算后取平均值。
一般来说大概距离已知点20公里左右,手持GPS测量的误差大概会增加2m左右,卫星信号质量的好坏,多路径效应也会影响手持GPS接收机的精度。所以建议一般距离20公里左右,重新计算一次三参数。
3.3 参数检核
将计算好的三参数输入手持GPS接收机后,在工作区的其他三个控制点上进行了精度检核。通过检核分析经过三参数改正以后在20公里的作业区半径内,平面误差的精度小于4m,高程误差略大一些小于5m。在测网边缘的控制点上进行检核,平面误差不大于5m,高程误差不大于9m。
3.4 精度分析
影响手持GPS精度主要因素,在获取的大地高这里会有较大的差别。虽然规范规定了手持GPS接收机定位误差中没有高程分量的误差,但是在坐标系统的转换中大地高的确参与了其中的计算[7]。而且误差的大小直接影响定位精度。不同的接收机大地高测量的数值也不相同,有的甚至会有将近10m的误差,如果直接使用这个大地高数据进行三参数计算,即便经纬度测量的值精度在高,也会影响最后的定位精度,所以现在的主要问题在于如何更准却的工作区的大地高数据。
如果工作区内布设过控制网,则可从平差报告中得到准确的大地高数据,从而计算三参数。如果工作区内无法得到已知点的大地高,则只能在已知点上观测得到大地高,可以对已知点进行多次测量取平均值得方法得到大地高数据。
4 小结
通过已知控制点的经纬度和工作区的高斯平面直角坐标,通过坐标系统的转换,最后求得了地心空间直角坐标系和工作区平面直角坐标系之间转换的参数,即三参数。通过计算的三参数输入到手持GPS中,在满足作业任务精度的前提下,大大的提高了作业效率。但是在实际的工作中也应该注意到,影像手持GPS精度的最重要的问题还是在于如何更精准的获取大地高H。随着GNSS多系统的应用,手持GPS接收到的卫星越来越多,特别是我国现在已经比较健全的北斗系统,在加上广域差分技术的应用,未来相信手持GPS接收机的精度将会越来越高,越来越好的服务于工程建设。