基于改进Smith预估控制器的温控系统
2020-03-26尚志武
尚志武,李 成
(天津工业大学 机械工程学院,天津 300387)
生化分析仪的温度是非常复杂的被控对象,其物理模型受到加热对象材质、空气的热交换过程和温度传感器的动态特性等因素的叠加。实际系统的温控模型受着复杂因素制约,很难确定出准确的解析解,因此需要通过借助仿真手段模拟温控系统的动态特性,对模型进行分析,并指导实际物理模型的参数设计。MATLAB 是一种用于数值计算的数学工具,其带有的控制系统的仿真工具能方便地进行数学分析和控制系统的仿真。在进行系统仿真前,首先要建立系统的数学模型,然后通过仿真得到系统的控制效果,并对参数进行修正,以期望获得更好的控制效果[1]。
实际加热系统的动态特性是由系统的加热功率和环境热量的交换律决定的,在系统环境不发生改变的情况下,系统的温度理论上和系统的加热功率有关,并起着决定性作用。根据温度控制的一般经验,不考虑系统的时变性,将系统的传递函数理想化处理,由于加热方式和温度系统固有的热容滞后,温度控制系统的模型一般可以简化为一个带有时滞的一阶惯性系统[2-4]。然后分别讨论系统在应对鲁棒性、时变性问题上的解决方法。
典型的大时滞系统是控制系统面临的困难问题,但时滞系统广泛存在于控制系统中。针对这种大时滞控制,学者们提出了一些克服时滞的控制方法。从有无控制系统的模型来分,可分为有模型方法和无模型方法。有模型方法主要有Smith 预估控制、滑模控制和鲁棒控制。无模型控制方法有模糊控制、预测控制、神经网络和专家控制等[5-6]。随着现代控制理论的发展,智能控制对于复杂问题的解决提供了新方法,它不依赖于被控对象的数学模型,同时具有一定的自适应,自学习和容错能力。智能控制方法相比较传统控制方法,设计规则会更加复杂,通用性更差。目前来看,将经典控制方法和智能控制方法结合的新方法成为解决目前控制理论难题的主要手段。这种新方法可以吸纳智能控制中的强决策能力,又参考了经典控制方法中的数学模型,会提升实际控制的效果。对控制效果的要求上,生化分析仪的温控系统的研究目标是系统温升迅速、稳定好、并严格限制实际温度的超调量[7-10]。为此,本文使用改进的Smith 预估控制方法对设备进行温度控制。
1 Smith预估控制基本原理
设被控对象的传递函数为G(s)=Gp(s)·e-τs,常规Smith 预估控制器的系统结构如图1 所示。
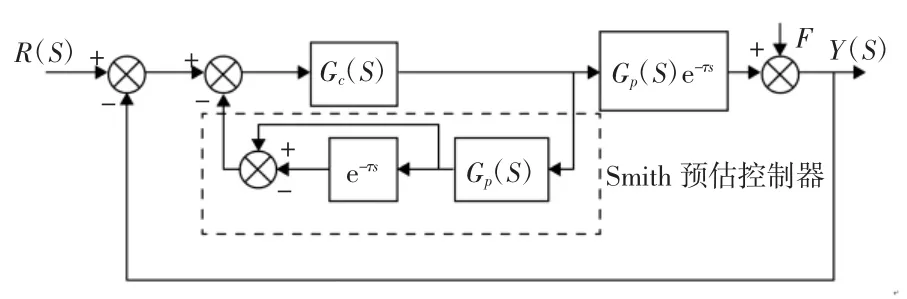
图1 Smith 预估器的控制框图Fig.1 Control block diagram of Smith predictor
图1 中,经过Smith 预估器补偿后,此时系统的闭环传递函数为:

式中:Gc(s)为控制器传递函数;G(s)=Gp(s)·e-τs为被控对象的传递函数。
此时的系统不再包含时滞环节,消除了纯时滞环节对控制品质的影响,闭环传递函数分子上的时滞环节只说明输出比给定延迟时间为τ。
通过系统传递函数可以看出,模型准确的Smith预估控制具有很好控制效果。通过MATLAB 对模型进行仿真,讨论当Smith 预估控制器与系统模型相差较大时,常规Smith 预估控制器的控制效果劣化情况。
2 Smith预估控制器仿真分析
通过对酶免疫生化分析进行加热,使用阶跃响应法[5]实际测得该温控系统的传递函数为:

式中:K 为参数增益;T 为时间常数;τ 为时滞时间。
当这3 个参数不匹配程度以20%为一幅度单位,上下浮动1 到2 个单位时,观察系统的控制效果。Smith 预估控制器中的3 个参数为增益Km、时间常数Tm、时滞时间 τm。
(1)增益 K 不匹配时,图2 给出 K/Km=0.6、0.8、1.0、1.2、1.4 几种情况下仿真结果。

图2 常规Smith 预估控制器,增益K 不匹配的仿真结果Fig.2 Conventional Smith predictor,simulation results of gain K mismatch
如图2 所示,当K/Km=0.6 时,系统的控制效果变差,主要导致了系统的上升时间变长。当K/Km=0.8时,系统控制时间略有延长。综上,当K/Km<1 时,系统没有超调,但系统上升时间明显变长。当增益K/Km>1时,系统的控制效果变差,出现了幅度较大幅度的超调,但缩短了上升时间。
(2)时间常数T 不匹配时,图3 给出T/Tm= 0.6、0.8、1.0、1.2、1.4 几种情况下仿真结果。
由图3 可见,当时间常数T/Tm=0.6 时,系统出现了轻微的超调,但缩短了上升时间。当增益T/Tm=0.8时,系统没有出现超调,但在稳定前出现了一次震荡。当时间常数T/Tm>1 时,系统没有超调,但系统上升时间变长。

图3 常规Smith 预估控制器,时间常数T 不匹配的仿真结果Fig.3 Conventional Smith predictor,simulation results of time constant T mismatch
(3)时滞时间 τ 不匹配时,图4 给出 τ/τm=0.6、0.8、1.0、1.2、1.4 下几种情况下仿真结果。
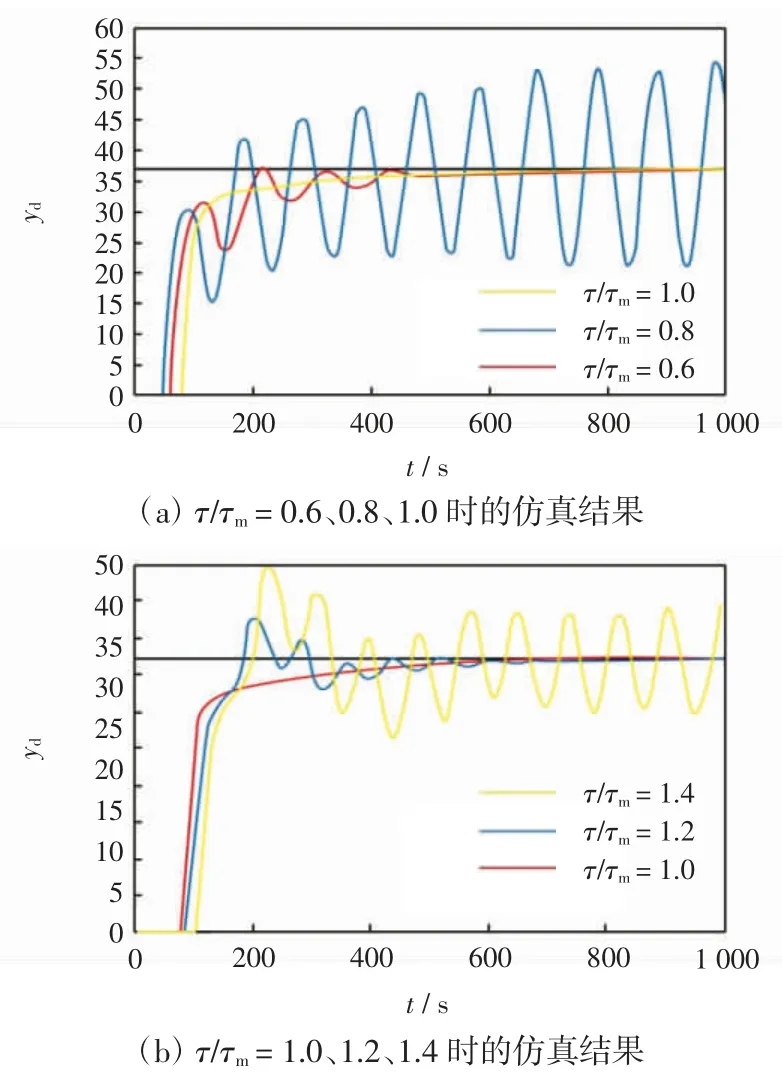
图4 常规Smith 预估控制器,时滞时间τ 不匹配的仿真结果Fig.4 Conventional Smith predictor,simulation results of time-delay τ mismatch
由图4 可见,在20%变化幅度下,时滞时间τ 对系统影响最大,当时滞时间 τ/τm=0.6 和 1.4 时,系统的无法稳定。因此,对于参数不匹配问题,常规Smith预估器应对时滞参数τ 最敏感。
综上所述,对于一般的Smith 预估控制器的模型参数不匹配时,时滞时间τ 不匹配对系统的影响最大,其次是增益K,再次是时间常数T。在模型参数不匹配时,模型取用较小的增益K 和较大时间常数T 时,系统仍没有出现超调,小幅度的延长了系统的上升时间。
所以,一般地,Smith 预估控制器中的增益K 增大5%,时间常数T 减小5%,可以使系统具有更好的鲁棒性。
本文通过仿真来验证这种假设。系统模型为:

式中:Y(s)、U(s)分别为输出量和输入量的拉普拉斯变换。
设计Smith 预估控制器中的增益K 增大5%,此时Km=1.05;时间常数T 减小5%,此时Tm=57。图5为在增益K 不匹配的情况下,2 种控制器的控制效果。
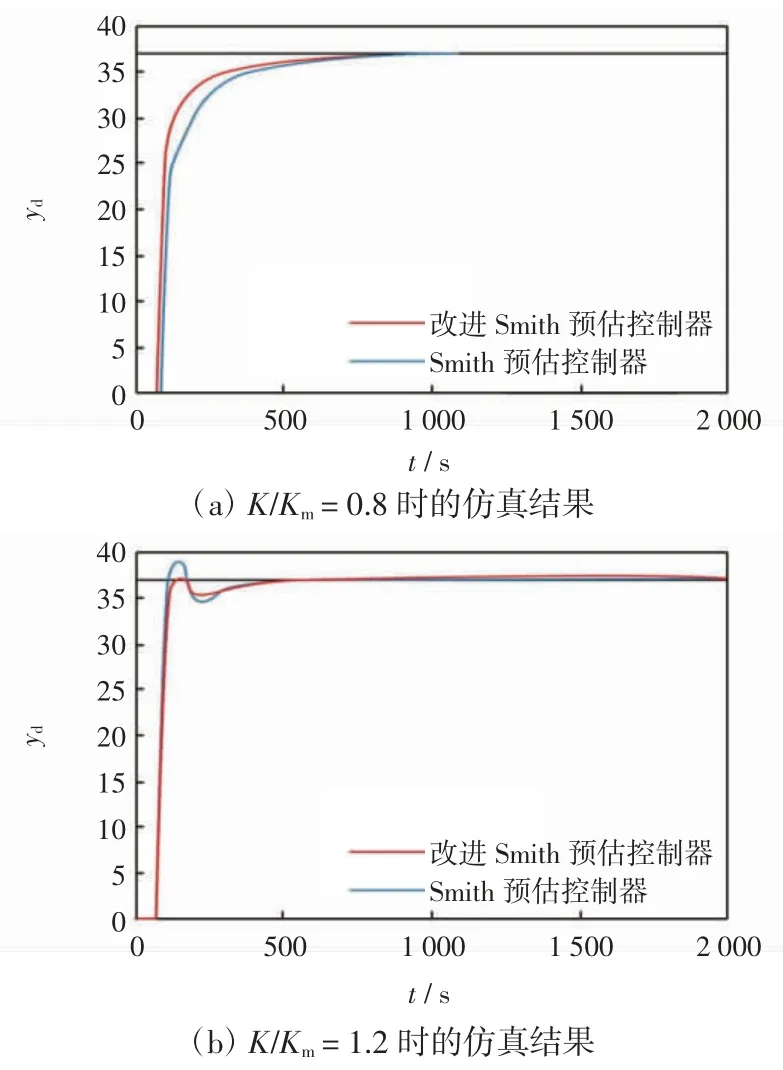
图5 参数改进的Smith 预估控制器,增益K 不匹配的仿真结果Fig.5 Parameter improved Smith predictor,simulation results of parameter K mismatch
根据仿真的结果,由图5 可以观察出在模型参数发生20%误差的情况下,取用增益K 增大5%,时间常数T 减小5%,参数K 不匹配的情况,系统上升时间没有发生明显变化,并且没有出现超调。但是在没有采取预估器参数优化的一组里,K/Km=1.2 的模型误差下,系统出现了超调。在控制要求严格限制超调的情况下,改进参数设计的控制器比原有的控制方案控制效果更好。改进参数的Smith 预估控制器增强了系统鲁棒性,在应对同样参数不匹配的情况下有了更好的对超调控制效果。
图6 为在时间常数τ 不匹配的情况下,2 种控制器的控制效果。

图6 参数改进的Smith 预估控制器,参数T 不匹配的仿真结果Fig.6 Parameter improved Smith predictor,simulation results of parameter T mismatch
图6 表明系统上升时间没有发生明显变化,并且没有出现超调。
给出在Km=1.05,Tm=57,时滞参数τ 不匹配的影响。图7 为在时滞参数τ 不匹配的情况下,2 种控制器的控制效果。
图7 表明:给出在 Km=1.05,Tm=57 的情况下,时滞参数τ 不匹配的控制上的影响并没有任何优化,也不会使系统的控制品质变差。所以对与τ 不匹配时没有优于一般Smith 预估器的控制效果。
根据以上仿真结果的分析,可以得出系统控制的稳定性依赖于预估模型的精确性。为了解决这个问题,很多学者提出了基于常规Smith 预估控制器的各种改进方法,为了提高系统控制的准确性,考虑降低对系统模型精确性的依赖。例如Hang 提出的改进Smith预估器,是对Smith 预估系统的反馈传递函数进行改进,降低了对模型的敏感度以增强它的鲁棒性和稳定性[7]。但这种方法对系统增益参数K 不匹配时,系统的控制效果会劣化。这种方法是传统方法的改进。目前通过智能控制方法和传统控制方法相结合的方式是控制领域的热点。智能控制方法能够有效的解决对模型的依赖性,例如模糊控制、专家系统等等。智能控制方法通过对系统模型的理解,预先规划好系统的控制方法,是一种主动控制的方法。将智能控制方法中的提前理解模型的方法应用到Smith 预估控制器中,以期望预估控制器能够更好的贴近于系统模型,取得更好的扣工资效果。
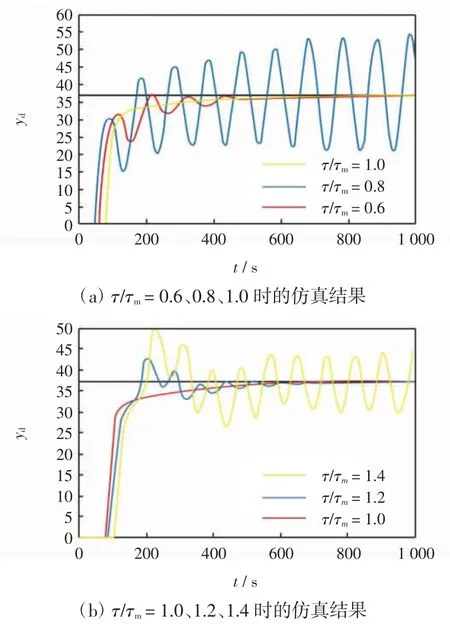
图7 参数改进的Smith 预估控制器,参数τ 不匹配的仿真结果Fig.7 Parameter improved Smith predictor,simulation results of parameter τ mismatch
3 改进的Smith预估控制器
基于Smith 预估器的基础上,使用在线系统辨识方法对预估模型的参数进行分段整定的方法对预估器中的模型参数进行在线修正是一种解决系统时变性的有效方法。这种改进方法一方面可以较好的应对系统模型参数的微小误差,另一方面可以应对系统模型的时变性,增强了系统鲁棒性。由于在线系统辨识使系统具有更好预估器模型更好符合系统本身的模型,提高控制器控制力。
在仿真结果中,可以看出时间常数T 对系统的影响较小,而系统的增益和时滞常数对系统的影响较大。本文首先考虑对系统的时滞常数τ 进行在线系统辨识。
对系统的时滞常数τ 进行辨识的方法有很多[11-14]:最小二乘类辨识方法(如遗忘因子最小二乘算法、卡尔曼滤波算法、有限数据窗最小二乘算法等),随机梯度类辨识方法(如遗忘梯度算法、广义投影算法等),智能类辨识方法(遗传算法、人工神经网络)。
设系统的时滞对象的传递函数为:

式中:X(s)为系统输入;Y(s)为系统输出;G(s)e-τs为含时滞的被控对象,其中G(s)为系统不包含时滞部分的传递函数;τ 为系统的滞后时间,即待辨识的参数。
2 个不同的随机信号的互相关联函数的定义式为:
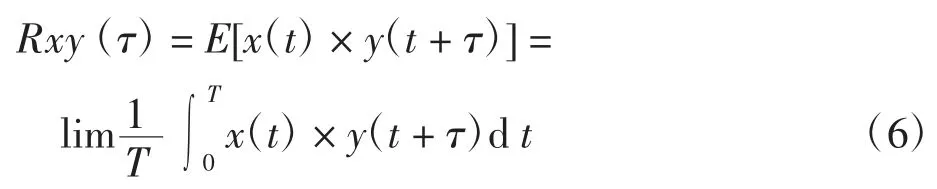
它描述了2 个不同的随机过程在任意2 个时刻值的相关程度。当观察时间T 的长度有限时,可以通过如下2 个公式得到2 个信号互相关函数的估计值:

式中:x(t)为输入函数;y(t)为输出函数。
将连续时间信号等用时间间隔采样,得到离散的时间序列。则离散时间互相关函数估计值的表达式:

式中:x(i)为离散化后的输入函数;y(i)为离散化后的输出函数。其中,N 为使用采样序列的数目,前提条件是整个采样序列的数目,也就是观察时间要大于N。
在被辨识的系统中,通过输入输出数据计算的值,找出的最大值,则与最大值相对应的就是被辨识系统中的时滞参数估计值。即

该辨识算法一方面采用互相关函数来辨识滞后时间,并引进了快速傅里叶变换及其反变换,提高了计算效率;另一方面,在变参数增量估计递推最小二乘算法估计时变参数的基础上,引入误差级序列,改善了时变参数的辨识精度。这种方法可以在较短时间内对时滞时间参数进行辨识,满足了系统在线辨识的需要。
采用阶跃响应方法方法对增益K 和T 进行估计。研究表明,如果模型失配是程度大,且当增益误差较大时,应该予以修正,否则系统将会不稳定。本文在设计控制器时引入了5%的设计误差,目的是使系统具有更好的鲁棒性。即在Smith 预估控制器参数上Km=1.05K,Tm=0.95T。图8 为改进Smith 预估控制器控制框图。
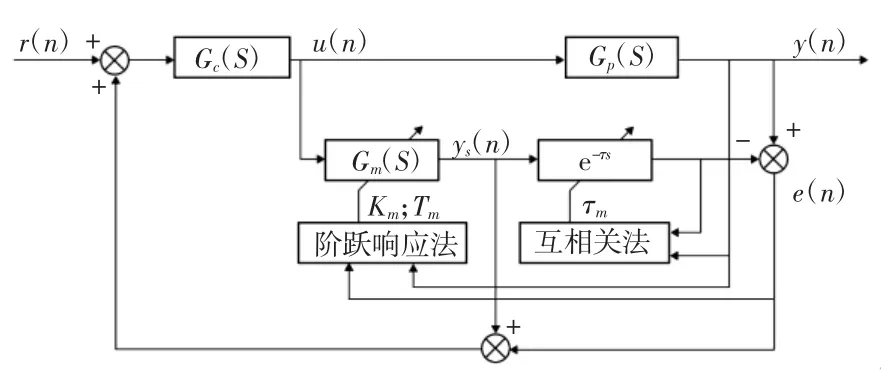
图8 改进Smith 预估控制器控制框图Fig.8 Control block diagram of improves Smith predictive controller
根据确定的改进Smith 预估控制器最终模型。通过理论分析了其可行性。最后,通过就是计算机仿真对该控制器进行仿真。采用仿真的模型为一阶惯性加纯时滞系统:

式中:Y(s)、U(s)分别为输出量和输入量的拉普拉斯变换。
图9 为在参数K 增加和减少的情况下,2 种控制器的控制效果。

图9 参数K 增加和减少的改进Smith 预估控制器仿真结果Fig.9 Simulation results of improved Smith predictive controller with K increase and decrease
图10 为在参数T 增加和减少的情况下,2 种控制器的控制效果。
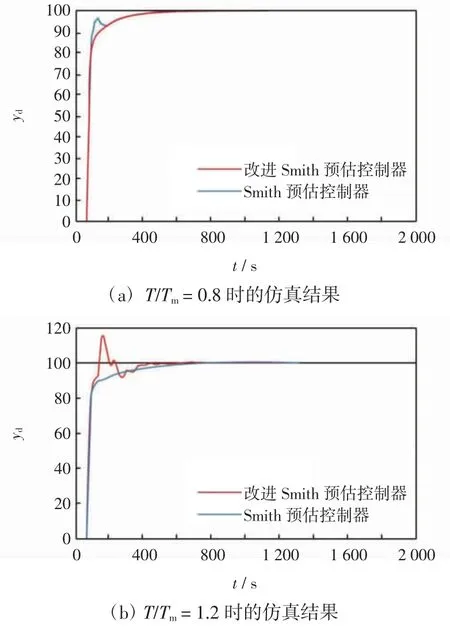
图10 参数T 增加和减少的改进Smith 仿真结果比较Fig.10 Simulation results of improved Smith predictive controller with T increase and decrease
实际上,改进的Smith 预估控制器实现了模型中参数的随时间改变。为了解决时滞参数的变化问题,根据系统模型完全匹配时预估一个控制时间,并依据此来确定系统采样时间。这样,一方面可以有效的避免使用采样控制导致的系统的不稳定性和常规Smith 预估控制导致的模型不匹配导致的系统不稳定性[15-19]。
将对象的参数分别增加和减少20%和未进行改进的Smith 预估器进行控制,比较其控制效果。
图11 为在参数τ 增加和减少的情况下,2 种控制器的控制效果。
通过仿真实验可知,改进的Smith 预估控制器在应对模型改变时有较好的控制效果。对于时滞时变系统模型的控制中,改进的Smith 预估控制器在控制系统的综合指标和系统的稳定性方面都是远远优于常规Smith 预估控制器的。
将实际设计的控制器用于实际温控系统,得出系统的控制效果。对系统进行参数整定,取用Kp=4,Ki=0.07,Kd=0.01,Km=1.05,Tm=57。在系统许用超调的情况下尽量的缩短控制时间,即降低系统的上升时间Tr。
实验结果如图12 所示。
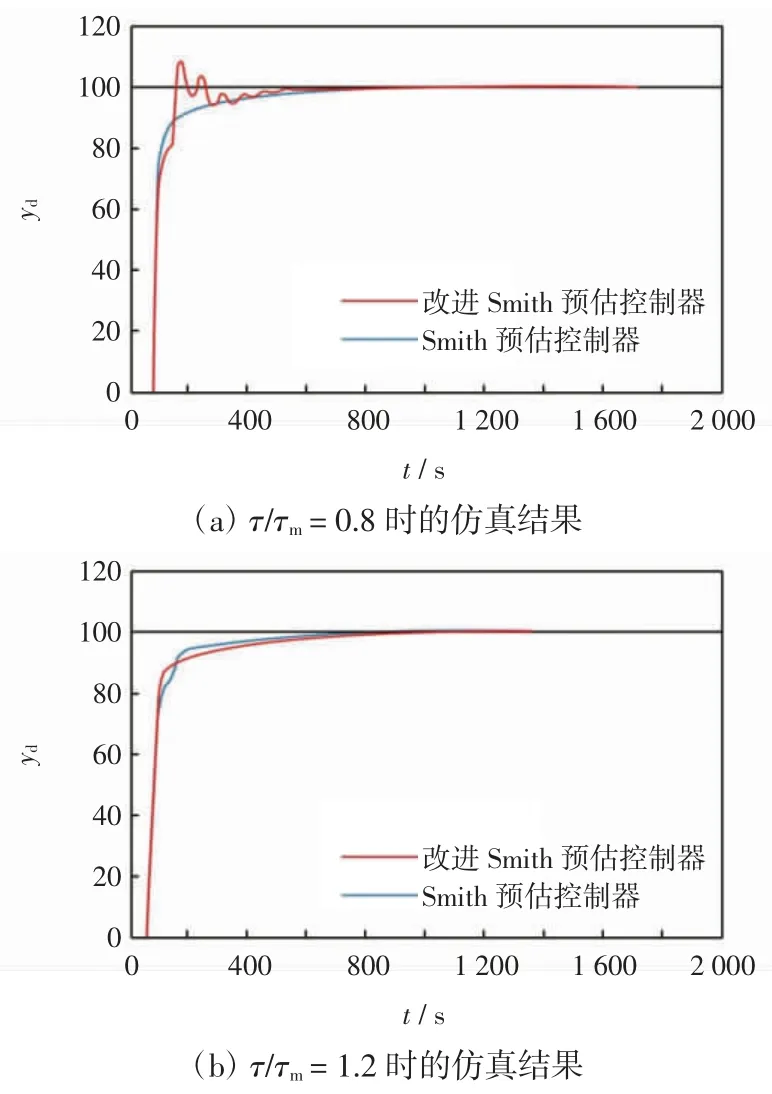
图11 参数τ 增加和减少改进Smith 仿真结果比较Fig.11 Comparisons of improved Smith simulation results with τ increase and decrease

图12 使用改进Smith 预估控制器的实验结果Fig.12 Experimental results using an improved Smith predictive controller
由图12 可知,在37 ℃的设定温度下,上升时间为tr=27.36 s,峰值时间 tp=210.12 s,超调 σ =0.35,超调量控制在0.95%,系统稳定后无震荡,稳态误差精度小于0.5%,满足仪器的控制精度、超调量、调节时间的要求。以上对Smith 预估控制器参数的设计可以作为改进Smith 预估控制器的参照。改进Smith 预估控制器是一种基于在线参数识别修正的控制器,实验验证有较好的控制效果。
4 结 论
(1)温度控制系统中通过改进的Smith 算法,提高了系统控制效果,改善温度控制的精度,严格限制了系统的超调量;根据系统的时变性,融合了分段时滞参数预测提高了系统的鲁棒性,提高了温控系统控制精度、降低了系统的超调量、调节时间。将一种基于在线参数识别的控制器应用于温度控制系统,提高了生化分析的工作效率。
(2)通过实验验证了该温控系统控制方法的有效性。实验证明,基于在线参数识别的控制器应用于温度控制系统能够有效的对系统的温度进行控制,最终在37 ℃的设定温度下,上升时间为tr=27.36 s,峰值时间tp= 210.12 s,超调σ = 0.35,超调量控制在0.95%,系统稳定后无震荡,稳态误差精度小于0.5%,满足仪器的控制精度、超调量、调节时间的要求,很好地满足了实用化的需求,对生化分析设备的研制具有一定指导意义。