基于多无人机协同的组网雷达轨迹欺骗干扰*
2020-03-25孙晓丽李艾静
秦 蓁,孙晓丽,周 昆,李艾静,2
(1.中国人民解放军陆军工程大学 通信工程学院,江苏 南京 210007;2.上海交通大学 电子信息与电气工程学院,上海 200240)
0 引 言
组网雷达系统是应用两部或两部以上空间位置互相分离而覆盖范围互相重叠的雷达来实施搜索、跟踪和目标识别的系统,综合应用了多种抗干扰措施,具有较强的抗干扰能力,因而在军事中得到了广泛应用。如何对组网雷达系统实施行之有效的干扰,是当今电子对抗界面临的一个重大问题。
诸多干扰方式中较为有效的是欺骗干扰,包括距离欺骗、角度欺骗、速度欺骗以及多参数欺骗等[1-2]。本文主要考虑距离假目标欺骗,基本原理如图1所示。无人机基于侦察到的敌方雷达发射电磁波的信号特征对其进行相应处理,延迟(或导前)一定时间后再发射出去,使雷达接收到一个或多个比该目标真实距离靠后(或靠前)的回波信号[3]。

图1 对雷达实施距离多假目标欺骗干扰
在组网雷达探测跟踪下,真目标和有源假目标在空间状态(如位置、速度等)上表现出显著差异。对于真目标,其空间状态与雷达部署位置无关。在同一坐标系中,各雷达探测出的真目标空间状态基本一致,可以认为它们是源自于同一个目标(同源)。对于有源假目标,它们存在于雷达与干扰机连线以及延长线上,其空间状态由干扰机和雷达部署位置共同决定。不同雷达测量到的有源假目标的空间状态一般不一致,有理由认为其来自于不同目标(非同源)。利用这种不一致性可以在组网雷达信息融合中心将假目标有效剔除。这种利用真假目标在组网雷达观测下的空间状态差异进行假目标鉴别的思想,简称“同源检验”,是组网雷达对真假目标鉴别的理论依据。
本文主要针对5部雷达组成的组网雷达系统进行研究。雷达将检测到的回波信号经过处理后形成的轨迹点状态信息传输到融合中心,融合中心对5部雷达获取的目标状态信息进行“同源检验”,只要至少有3部雷达同一时刻解算出的目标空间位置相同,融合中心就将其确定为一个假目标。20个连续的经融合中心确认的假目标点形成的合理轨迹,将被组网雷达系统视为一条真实的目标轨迹。所谓合理是要满足相应的目标运动规律,无论是运动速度还是转弯半径等均应在合理范围内。通过协同控制无人机的飞行轨迹,可在敌方的组网雷达系统中形成一条或多条欺骗干扰轨迹[4-5]。
无人机形成的欺骗干扰轨迹数目越多,对组网雷达产生的干扰越大。为了对组网雷达实施有效干扰,应在保证欺骗轨迹合理有效的前提下,尽可能多地生成虚假目标轨迹[6]。本文主要研究由9架无人机组成的编队在5 min内完成给定合理轨迹的同时,如何产生更多合理的欺骗干扰轨迹。
1 问题分析
对雷达实施有源假目标欺骗干扰时,干扰设备可以同时转发多个假目标信息(本文限定每一架无人机同一时刻至多产生7个假目标信息),但它们均存在于雷达与无人机连线以及延长线上,延迟(或导前)时间可根据实际需要确定。该组网雷达系统的每一部雷达的数据更新率为10 s(可直观理解为每间隔10 s获得一批目标的空间状态数据,无人机转发回对应雷达的假目标信息能及时获取)。若有效控制无人机编队的飞行轨迹,则可以生成多条虚假目标轨迹,以实现更好的干扰效果。实际中无人机可机动飞行,但为控制方便,无人机尽可能少做转弯、爬升、俯冲等机动动作,转弯半径不小于250 m。
若假目标点可通过同源检验,说明轨迹点是在同一时刻产生的,所有的无人机与雷达同时开始运转,不考虑相对时间的问题,因此只考虑5 min中前190 s内通过同源检验产生的轨迹点。本文的难点在于某一时刻无人机的假目标通过同源检验后,它所生成的其他假目标是否能与其他无人机产生的假目标融合成一个虚假轨迹点并通过同源检验。本文的主要解题思路:首先建立无人机及假目标的运动模型,运用一定数量的无人机干扰雷达,在保证能够形成给定的合理虚假轨迹B的前提下,剩余的无人机被用来调度,其形成的假目标要与参与形成B的无人机上的其余假目标共同融合成一个可以通过同源检验的假目标,即尽最大可能再次利用生成虚假轨迹B的无人机,从而才能尽可能多地形成虚假轨迹。求解流程如图2所示。
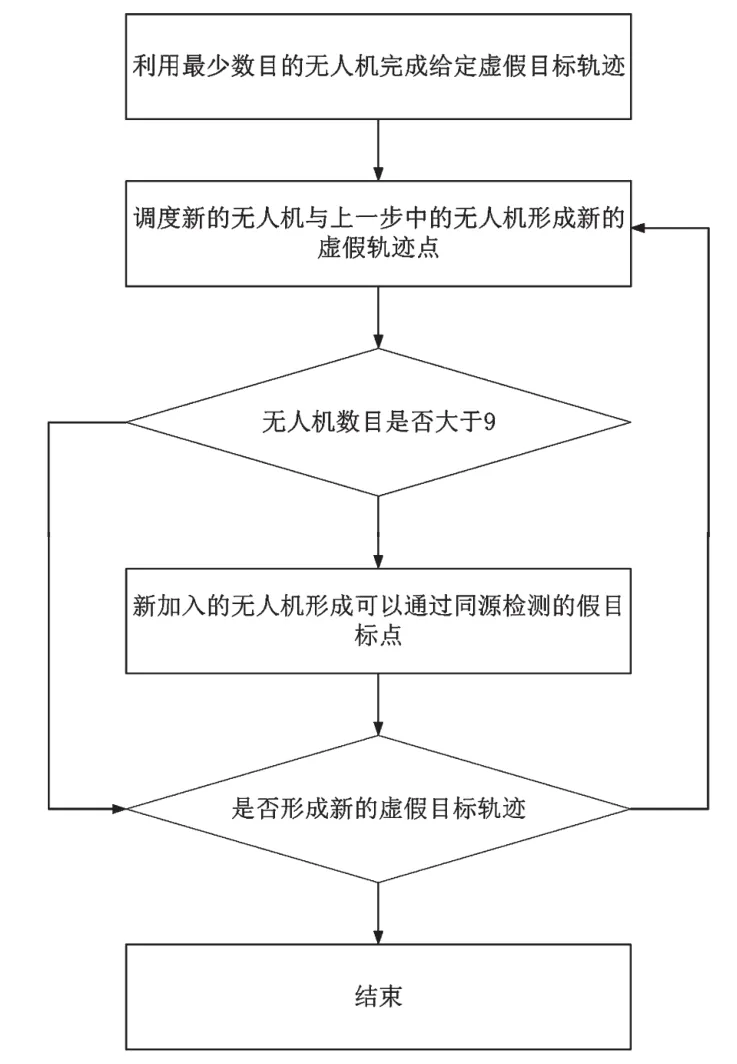
图2 本文求解思路
2 模型建立
本文研究的组网雷达系统由5部雷达组成,雷达最大作用距离均为150 km,也就是只能对距雷达150 km范围内的目标进行有效检测。本节建立了无人机与假目标的运动模型,如图3所示。

图3 雷达、无人机、假目标空间
如图3所示,r和R分别代表雷达到无人机和虚假目标的距离,αe和βe是无人机速度矢量的方位角和仰俯角,θ和φ分别是无人机及虚假目标相对于雷达的方位角和仰俯角,ve和vp分别表示无人机和假目标的运动速度。因此,在直角坐标系下可以建立如下运动模型:

其中,ap1、ap2、ap3分别表示虚假目标的加速度、速度矢量方位角的变化率和仰俯角变化率。分别表示假目标在各坐标轴上的速度分量。
根据球坐标系和直角坐标系的转换关系,本文将假目标的运动模型转换到球坐标系下,可以表示为:


由于无人机、假目标和雷达在同一连线上,因此无人机或假目标相对于雷达方位角θ和仰俯角φ以及二者变化率可表示为:
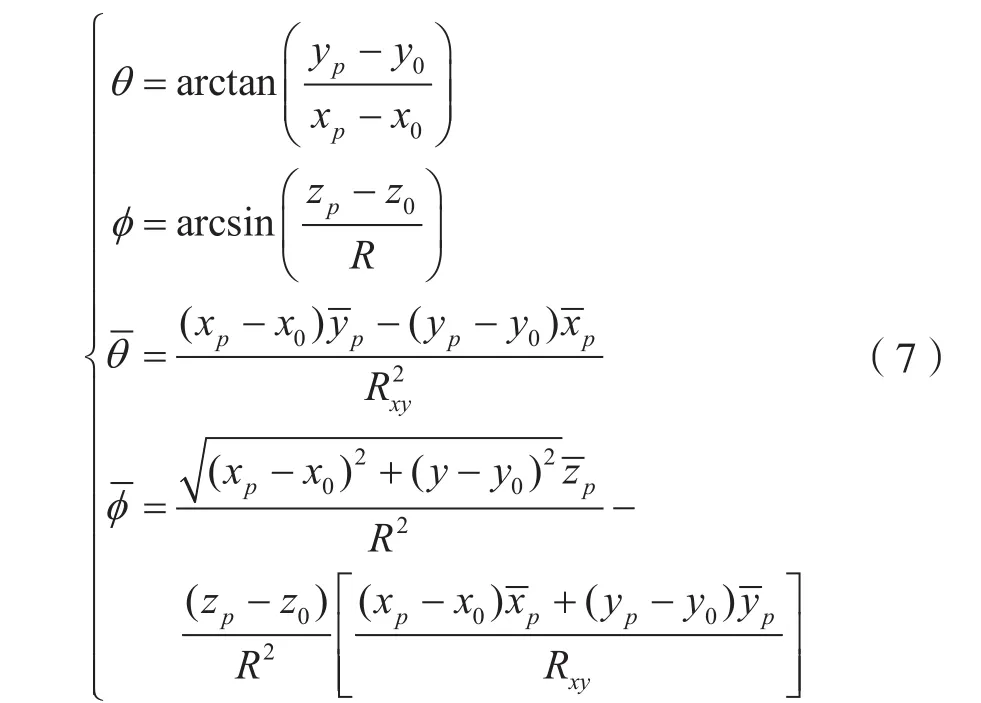
其中,(xp、yp、zp)表示假目标的空间位置,(x0、y0、z0)表示雷达的空间位置,且:

又因为无人机的运动方程与假目标类似,同理可得无人机的运动模型。
3 模型求解
本文研究的5部雷达的地理位置坐标分别为:雷达1(80,0,0),雷达2(30,60,0),雷达3(55,110,0),雷达4(105,110,0),雷达5(130,60,0)(单位统一为km)。基于第2节模型中无人机与虚假目标的运动关系模型,无人机协同飞行生成虚假目标轨迹的过程如图4表示。
具体求解步骤如下。
步骤1:根据无人机的最大飞行速度v2和最小飞行速度v1,乘以飞行时间,获得相应的飞行距离范围为 r1-r2(r2>r1)。
步骤2:以U1出发点为球心,r1、r2为半径分别做球。下一个虚假轨迹点和雷达Ri的连线在两球夹层的交线为L1和L2,则L2上的点为无人机可行的速度和方向点的范围。任选L1和L2上的点和U1连接,则获得U1的飞行速度和方向。
步骤3:若以U1出发点为球心的球体与下一轨迹点和雷达Ri的连线没有交点,则说明相邻两条直线之间的距离超过了无人机最远的飞行距离,因此需要在后一个点的位置重新放置一架无人机,然后再继续执行步骤2。
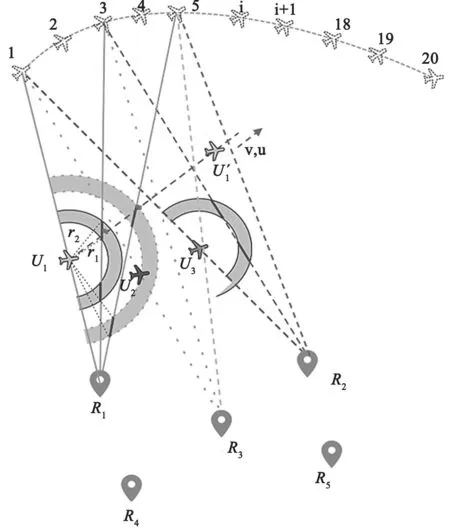
图4 无人机运动路径
该问题的约束条件可以表示为:

若一架无人机在限制条件下不能形成已知的虚假轨迹B,则需要再增加一架无人机,以此类推计算对于单一雷达Rm而言检测到的虚假目标可形成轨迹B需要的无人机数至少为km。
根据给定的合理虚假目标轨迹B,计算可得所需无人机数目。对于单部雷达而言,形成轨迹B需要的无人机数量如表1所示。

表1 雷达坐标及所需无人机数量
由表1可知,从5个雷达中选取任意3个雷达就能够形成可通过同源检测的虚假轨迹B,如图5所示。因此,剩余可调度的无人机为6架。
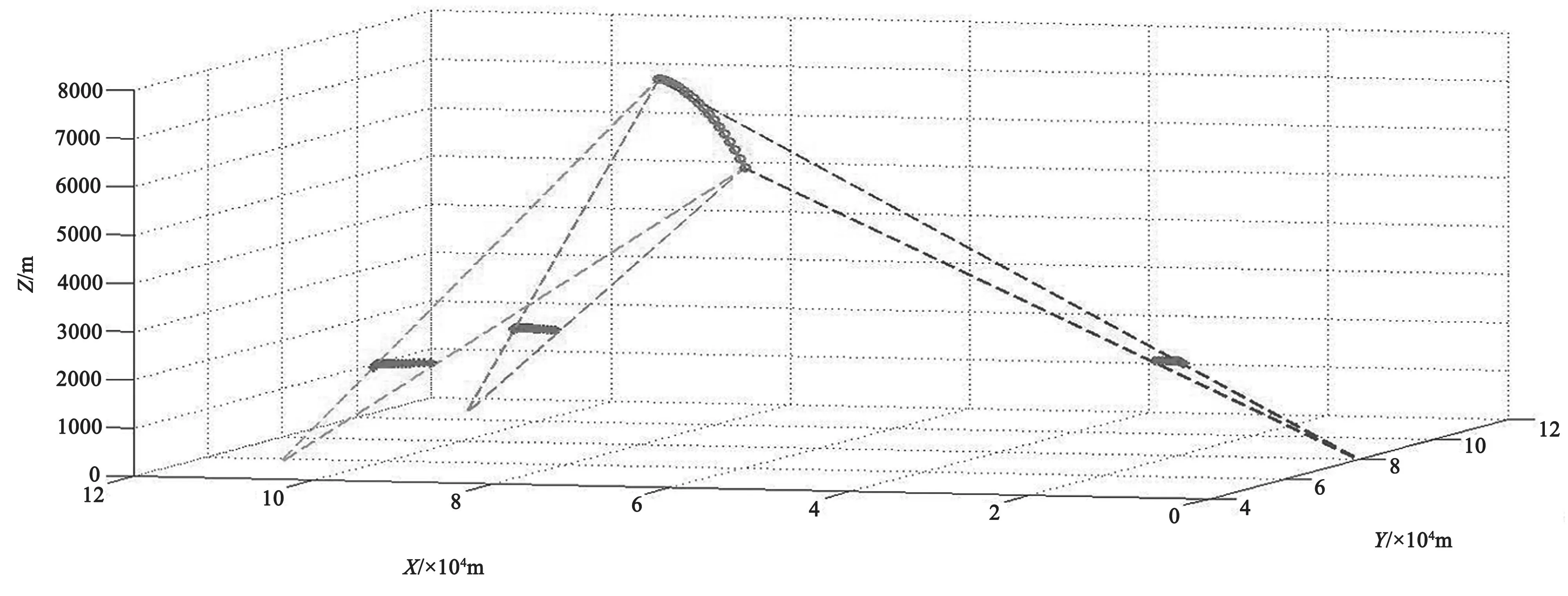
图5 给定虚假轨迹形成
每架无人机可任意生成7个位于雷达与无人机连线上的假目标,因此在雷达R5与无人机的连线上可按比例生成一个与B相似的虚假轨迹B´(根据三角形相似原理同比例位移放大)。
通过计算可知,只要在限定高度内,每架无人机都可以独立完成对一个雷达的干扰,且每3个雷达都可以形成一条虚假目标轨迹。因此,只需要对任意一个雷达分配其余任意两个雷达,就可以生成满足条件的轨迹,因此会产生4条欺骗干扰轨迹,此时无人机总数刚好为9架。由于无人机总数的限制,除给定的虚假目标轨迹B之外最多还能产生3条虚假轨迹,如图6所示。

图6 虚假轨迹分布
4 结果分析
通过计算,3架无人机就可以完成给定的虚假目标轨迹,这已经是完成虚假目标轨迹所用无人机数目最少的情况,剩余6架无人机用来生成新的虚假目标轨迹,最终求解出9架无人机在20个时刻的位置,如图7所示。
无人机在两个相邻时刻运动规律如下:若两点之间距离小于333 m,需要做爬升和俯冲运动;若两点之间的距离大于333 m小于500 m,就做直线运动。为了控制方便,无人机尽可能少做转弯、爬升和俯冲等机动动作。新生成的虚假目标轨迹和给定的虚假目标轨迹具有空间相似关系,因此新生成的虚假目标轨迹是合理有效的,并且与给定的虚假目标轨迹的运动规律相似。

图7 9架无人机运动轨迹
5 结 语
多无人机对组网雷达的协同干扰是一种有效的雷达干扰方式。通过协同控制无人机的飞行轨迹,可在敌方的组网雷达系统中形成一条或多条欺骗干扰轨迹。无人机形成的欺骗干扰轨迹数目越多,对组网雷达产生的干扰越大。本文目标是利用有限的无人机生成尽可能多的合理的虚假目标轨迹。因此,运用无人机空间运动方程建立无人机空间运动模型,通过空间位置的平移变换,在原有轨迹的基础上生成新的虚假目标轨迹。通过计算可知,9架无人机除形成原有1条轨迹外,还可以形成3条虚拟轨迹。
