轻型机载激光雷达航测在公路勘测设计中的应用研究
2020-03-24邱泽玮
邱泽玮
(中晟地理信息有限公司,湖北 武汉 430070)
机载激光雷达(LiDAR)测量系统是集激光测距技术、GPS 技术和惯性导航(INS)技术于一体的集成技术,是当今勘察测量业界最先进的技术。随着无人机低空航测技术的广泛应用,将轻小型激光雷达测量系统搭配无人机航测设备进行工程勘测,兼具效率、精度及勘测成果的多元化。利用该技术可以实现高自动化、高机动性勘测,且成果生产的周期相对较短,测绘成果精度较无人机普通数码航测高[1]。在成果种类上,与传统野外勘测相比,能额外提供数字表面模型(DSM)、数字高程模型(DEM)、数字正射影像(DOM)及高精度点云。因此,在公路勘测设计中,为了提高勘测作业效率、提供多元化的勘测成果,要强化对轻型机载激光雷达航测技术的应用。
1 工程概况
1.1 测区概况
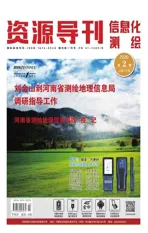
本文以南京至盐城高速公路工程勘察设计项目NY-SJ-2 标为试验对象。NY-SJ-2 标从高邮南(截止到京杭运河特大桥桥尾)至盐靖高速(含盐靖枢纽)约58 km。高邮—兴化区段地貌区为里下河浅洼平原区,地貌单元为浅洼平原。测区范围如图1 所示。
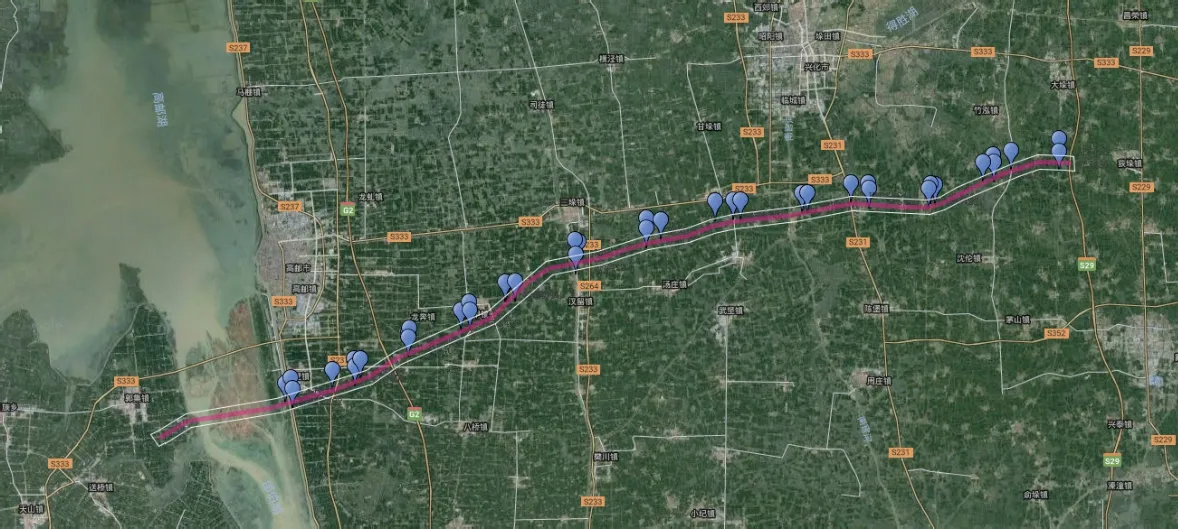
图1 测区范围
1.2 项目任务
项目任务包含四个部分:基站联测、参考面测量;机载LiDAR 航空摄影;数据处理(点云数据处理以及1∶2000 比例尺DSM、DEM、DOM 制作);1∶2000 地形图(DLG)制作。
2 项目实施的关键技术及设备
2.1 LiDAR 技术
机载激光雷达测量系统涵盖很多现阶段较为先进的技术,包括激光测距技术、GPS 技术及惯性导航(INS)技术等。将这一技术应用在公路勘测设计工程中,目的就是获取高精度的数字表面模型,保证勘测效率和精度。
本项目中,激光雷达测量系统采用SkyEye 天眼激光科技有限公司的SE-J500C 系统(如图2 所示),它集成了激光扫描仪、惯导系统及数码相机,其中,数码相机为Sony A7R;惯导系统型号为Applanix POS/AV 系列,采样频率100Hz;激光扫描仪的型号为RIEGL_VUX_1UAV,最大脉冲频率550KHz,扫描角度330°,飞机采用北方天途航空技术发展有限公司的M6FC6 旋翼无人机(如图3 所示)。
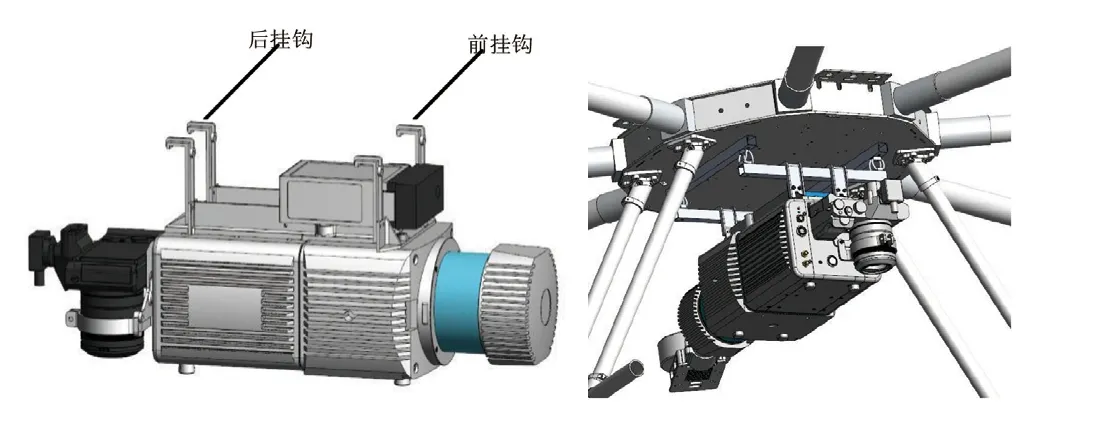
图2 SE-J500C激光雷达航测系统

图3 天途M6FC六旋翼无人机
2.2 LiDAR 航空摄影
航摄要严格按照要求执行,如果出现绝对漏洞或其他严重缺陷需要补摄[2]。漏洞补摄时要结合以往的设计航迹开展工作。对于不影响内业加密选点和模型连接的漏洞,只需补摄漏洞即可,实际航线如图4 所示。

图4 实际航摄航线
2.3 激光点云分类
(1)利用TerraSolid 软件滤波(分离地面点和非地面点):该软件基于不规则三角网原理,通过设定参数阈值进行滤波。其主要的参数设置项为:Max building size、Terrian angle、Iteration angle 等,阈值大小取决于测区的地形以及植被的高低、密度等。 (2)将分离出来的非地面点进行细分:根据点的高度、分布的形状、密度、坡度等特征,对非地面点云进行分类。对于形状规则、空间特征明显的地物(如建筑物、电力塔等),可通过参数设置,利用软件自动提取。同时,采用人机交互方式辅助分类。也可利用基于反射强度、回波次数、地物形状等的算法或算法组合,对点云数据进行自动分类。
2.4 精度要求
DOM 不能有任何噪声、污点、划痕等,点云数据密度应大于1 个点/平方米。数字地面模型精度要求是 :路线横断面数模提取精度应满足平面精度≤10 cm,高程精度≤5 cm。被交道路采集精度要求是:被交道路需按要求提取道路两侧边线、行车线等路线元素,提取精度应满足平面精度≤5 cm,高程精度≤3 cm[3]。
3 数据处理以及成果制作分析
3.1 LiDAR 数据处理流程
应用轻型机载激光雷达航测系统,针对数据处理层面,要按照LiDAR 数据处理流程(如图5 所示)进行。
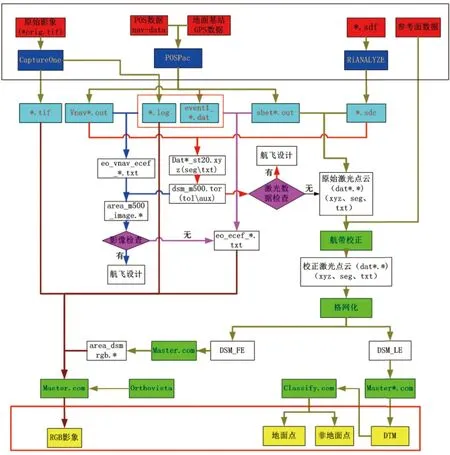
图 5 LiDAR数据处理流程
(1)针对导航文件制作。依照实际情况对POS 姿态数据进行应用,同时联合应用地面GPS 基站数据共同处理,以获得相对精准的导航数据文件,提升测量效果和水平[4]。
(2)针对控制文件制作。在制作控制文件时,应严格检查,明确是否存在漏飞现象。然后结合覆盖数据,采用科学手段制作控制文件。
(3)针对三维激光点云坐标计算。科学处理原始激光数据,确保其可以成为原始的三维激光点云数据。然后结合数据所测得的平面和高程控制点,对二者进行校正,以精准计算出地表目标物的空间三维坐标。
3.2 DEM 制作
通常情况下,DEM 是用激光数据的末次回波生成的,制作流程为:(1)格网化。依照点云的坐标值,根据一定的点间隔,将经过校正的点云数据插入规则格网中。然后划分点云数据,将其分成多个大小的图幅[5]。(2)填补小缝隙。结合实际对经过格网化的点云数据进行填充处理,可以用周围点的灰度值填充影像中的小缝隙、小黑洞,提高高程值,确保没有任何黑洞现象。(3)生成浮雕影像。利用相应的技术手段,让处理完成的数据生成浮雕影像,以便后续生成三维模型,直观反映地表实际。(4)过滤。填充、去粗点工作结束后,还要进行过滤处理。过滤时,要先进行过滤参数试验,只有选好过滤参数,才能过滤好,进而保证数据成果质量,减少手工工作量。过滤参数试验结束后,将参数应用于所有过滤命令中。(5)手工编辑。过滤后影像上有很多黑洞,大多是过滤掉地物遗留下来的,一般应用程序无法将其过滤干净,需要人工干预。(6)内插。要想彻底清除影像上的黑洞,应进行内插处理,利用黑洞周围的高程点,将黑洞内插上,保证地面具有较强的平坦性。(7)裁剪重叠区。内插结束后,需要剪裁每幅影像边缘的重叠部分,最终生成DEM 模型。
3.3 DOM 制作
首先,DOM 制作要进行正射影像校正,利用生成的DEM,合理地对外业采集的影像进行微分对纠正,以便在短时间内生成单幅正射影像。其次,要进行匀色。将获取的影像导入Inpho 软件,实现对正射影像的匀色处理,确保影像整体颜色协调、匀称。再次,需要对编辑镶嵌线进行合理制作。最后,进行影像分幅制作,最终生成正射影像DOM[6]。
4 结束语
在公路勘测设计中,利用轻型机载激光雷达航测技术,可以实现高自动化、高机动性勘测,且勘测效率高、成果生产周期较短,测绘成果精度较高。然而,该技术虽较为先进,但要想广泛应用于公路勘测设计项目,还需出台相应的技术规范和标准,强化应用研究。