船舶智能横向平移靠泊模拟仿真
2020-03-23李兴盛张嘉琪冯炘尹美琳路春晖付振楷
李兴盛 张嘉琪 冯炘 尹美琳 路春晖 付振楷

摘要:船舶螺旋桨-舵的传统推进系统无法做到持续平移靠泊航行,为了解决船舶横向平移靠泊难的问题,建立靠泊数学模型,利用LabVIE虚拟仪器同步采集、图像分析和实时处理技术开发编写了一套横向平移智能靠泊操作系统。该系统利用船尾两个可360度旋转的螺旋桨为主要输出控制,通过可以实时把船舶自身姿态角和螺旋桨推力及旋转角度数据实时传输并加工处理后再反馈到螺旋桨控制器上,应用多重的判断结构提高测试效率和精度。最后通过在无环境干扰和存在环境干扰下模拟仿真,证明智能靠泊系统数据传输正常、稳定性良好,具有实用价值。
Abstract: This paper developed a set of control system based on LabVIEW, which uses the technology of synchronous acquisition, image analysis and real-time processing, to solve the difficult problem ship,lateral displacement berthing, and set up a mathematical model. The system uses two propellers at the stern, which rotate 360 degrees, as the main output control, which can transmit the ship's attitude angle and propeller data to the system in real-time and feedback to the propeller controller after processing, multiple judgment structures to improve test efficiency and accuracy. Finally, the simulation results show that the intelligent berthing system has normal data transmission, good stability, and practical value.
關键词:虚拟仪器;LabVIEW;数据采集;横向靠泊;数学模型;模拟仿真
Key words: virtual instrument;LabVIEW;data collection;lateral displacement berthing;mathematical model;analog simulation
中图分类号:U664.3 文献标识码:A 文章编号:1006-4311(2020)05-0267-04
0 引言
船舶运输已成为当今水上交通发展的主流,船舶自动靠、离泊在水运交通运输上已成为各个国家研究的热点方向[1],然而横向平移靠泊在国内研究较少。
船舶实现平行码头靠泊运动,传统螺旋桨-舵推进系统的船舶由于构造和舵效问题难以成功,且由于螺旋桨内部的流场分布不均匀、不稳定,导致靠泊效率偏低[2]。本研究基于虚拟机LabVIEW控制可360°旋转船尾双螺旋桨推进器实现横向平移靠泊。该系统能够产生更好的回转力矩和侧向力,提高船舶的操纵性及可靠性,缩短了靠泊时间,同时降低空泡及行驶中的噪音[3],选择LabVIEW因为不仅可以作为一个开发平台,应用于一般的数据管理、科学计算等方面,其最大的优势还在于非常容易和各种硬件集成[4],LabVIEW 为测试仪器提供了最佳的开发平台,它已经成为编程语言的工业标准[5]。
1 建立数学模型
本研究平移靠泊问题转化为合力矩及力的合成与分解问题。船舶实际航行有6个自由度方向[6],为更直观展示物理意义,本研究模型仅考虑3自由度,建立船舶螺旋桨平面数学模型,船舶俯视示意图如图1,可旋转螺旋桨位于船尾两侧,可以提供不同方向上的力,分析船舶左舷方向侧向航行的受力情况。Fa、Fb分别为左舷、右舷螺旋桨推力,Fav、Fah、Fbv、Fbh分别为左、右舷竖直、水平分力,α、β为Fa、Fb与竖直方向的夹角;O是船舶重心,La与Lb之和为L,即两螺旋桨间的距离。满足公式:
式(1)表示船舶水平和竖直方向合力距大小相等,方向相反,目的保证在航行中不会发生偏转;
式(2)表示船体竖直方向力为常数;
式(3)表示水平方向力大小相等方向相反:
式(4)、式(5)表示水平竖直方向受力的三角函数关系。
综上所述,根据刚体力学原理,物体所受合力距为0时,且合力方向指向物体运动方向,物体则不会发生偏转,运动方向为合力方向。
Fa、Fb为左、右螺旋桨推力,ρ液体密度,n为转速,D为螺旋桨直径,K为推力系数,J为进速比。
式(6)、(7)、(8)则是表示双计算螺旋桨推力大小。
2 LabVIEW软件开发
2.1 螺旋桨控制流程
控制双螺旋桨改变角度和速度的控制器主要包括船载工业电脑主机、螺旋桨控制器、螺旋桨角度电机控制器、螺旋桨转速电机控制器等,整个操纵系统是一个闭环控制系统,船舶的实际航向作为反馈信号传输到传感器,最后通过电脑调节信号,按照预先规定路径航行。原理图如图2所示。
2.2 螺旋桨控制程序设计
首先建立输入全局变量,如图3。输入量分为输入变量和输入常量。输入变量有三个,分别为螺旋桨a的推力及角度;靠泊角——左舷平移靠泊为0度,输入常量5个,分别是角度与合力距精度——偏离航行的角度与船体所受力矩偏移大小,精度越高,船体靠泊稳定性越好。
角度增量代表螺旋桨每转动一次所增加的角度;重心距桨间距离和两桨间距离是根据船体实际结构进行输入。输入变量根据实际靠泊要求输入数值,而输入常量是在船舶实际情况已经录入的最佳数值,输入后即成为定量。输入量确定后,将数学模型关系转化成LabVIEW程序,求合力距程序部分框图和程序停止条件件如图4、图5所示。当程序同时满足实际要求航行角度小于等于角度精度(实际靠泊中可接受的误差角)与合力距小于等于合力距精度时,程序有解。为增加程序可行性,本研究中考虑了力是矢量,有大小和方向。
程序部分操纵控制界面如图6所示。输出区主要参数值为螺旋桨b推力、角度、合力和合力距四个值,其余输出为执行算法中的过程值。图形显示器表示桨a、b角度及合力距的大小。
3 实验仿真模拟
3.1 重心对平移靠泊的影响
船舶重心位置影响着平移靠泊过程中螺旋桨推力的效率。利用控制变量发,让合力距、偏移角度精度、两螺旋桨之间距离L都不变,靠泊角为0度时,仅改变重心距桨间距离Lh。观察Lh/L比值与螺旋桨效率Fa+Fb/C关系。通过LabVIEW计算得出关系曲线,Lh/L比值越小表示船舶重心越往后。由图7,图像横坐标表示Lh/L比值,纵坐标表示螺旋桨输出的效率值。由图形可知随着Lh/L比值逐渐变大,螺旋桨效率成下降趋势,即船舶重心越在靠近船头方向,螺旋桨推动效率越低。所以为了保证螺旋桨有更高的调节方向效率,要保证船舶重心位置尽可能在船尾后方处。本研究中所设计的船舶两桨间距离和重心距桨间距离的比值为1,此时螺旋桨控制船体靠泊效率值为45%左右,正负为1个误差。
3.2 桨a旋转角度与效率仿真
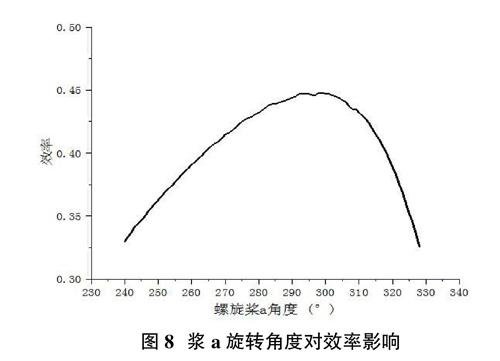
输入值桨a旋转角度存在有效的旋转范围,且在有效角度内,是否存在最优值,关系着程序的执行效率,所有讨论桨a旋转角度最优角度很有必要。设桨a以船舶左舷水平线为0°角,顺时针旋转为正角,逆时针旋转为负角,其仿真结果如图8所示。采用控制变量法,螺旋桨推力a推力固定,仅改变桨a角度,通过程序计算得到桨b推力及角度,最终得到船舶合力值和双桨推力和的比值,即效率。根据图像横坐标范围可知,桨a旋转角度范围为240°- 328°之间,在此范围中,保证系统存在解。同时随着旋转角度的增加螺旋桨效率呈现先升高,然后到达峰值后平稳一段时间,最后迅速降低。所以当输入角度在260°到320°之间效率值大于0.4,其中当角度在290°到300°之间存在最大值0.45。所以桨a角度输入选取值在290-300之间存在最优值。
3.3 无干扰横向平移输出仿真
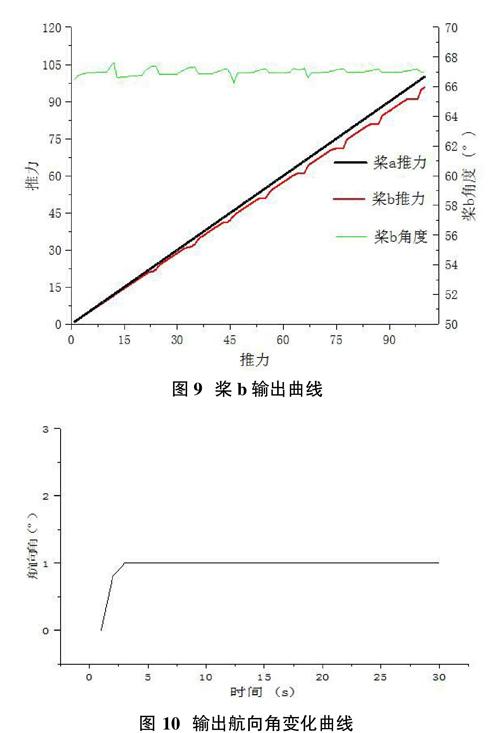
仿真得出桨a的最优角度后,输入桨a最优旋转角300°,输入不同的桨a推力值,观察桨b输出推力及角度的变化规律。如图9所示,选取输入桨a推力数值从1依次增加到100时,输出桨b推力总体呈现上升趋势,但是推力值不高于桨a的推力值,且两数值差值相近。但是桨b的旋转角度近乎不变,维持在66°,上下差1°左右摆动。通过图线可知,当桨a旋角度不变时,桨a推力值与桨b的推力值变化呈现正相关,桨b旋转角度的变化与桨a推力值影响不大。通过图像可知,在静水无干扰的条件下,实现侧向平移运动,桨a旋转角度为290-300°之间任意取值时,仅改变桨a的推力值大小,程序自动算出桨b所需要的推力及旋转角度大小,每给一个桨a推力值,输出桨b会有值与之对应,航向角曲线如图10所示。
3.4 有干扰下横向平移模拟仿真
实际船舶航行中,会存在水流、风向等干扰因素,导致靠泊中的船舶偏离航线,无法持续保持固定的航线平稳航行[7],所以想要应用到实际水域中,考虑环境因素的干扰尤为重要,如何抵消航行过程中的误差是编写程序中的难点所在。
在靠泊过程中为了保持船舶按照预定航线航行,船体不发生偏转,程序中引入了模糊PID算法[8]。PID控制能改善被控过程的动态和稳态性,提高系统抗干扰性及参数实变的鲁棒性[9],应用到靠泊控制则可以具有很好的稳定性[10]。如果船舶偏离航线,PID算法将会根据偏转的角度反馈到两支螺旋桨控制器上,从而控制转速是船体归正到正确的航线。
实验模拟仿真在仅考虑航向偏移时,将输入桨a推力和角度分别设为数值10和300,模拟实际航行中船舶偏移航线的情况,即不断改变靠泊偏移角度。规定靠泊点和船舶中心的水平角度为0°,顺时针偏移为正角度,逆时针偏移为负角度,本研究最大有效偏移角度为正负50度。模拟图像如图11所示,整理偏移角从负50度逐渐增大到正50度,观察桨b的推力及角度变化规律。
通过仿真模拟可知,偏移角度从-50度到规定航线0度再到偏移航线50的过程中,桨b推力是先平稳上升,当达到0度左右时,两桨推力值最接近,当偏移角大于30度时,推力值迅速上升,达到2-3倍桨a的推力值;桨b角度变化则是较为平稳,保持在80度到60度中间。在偏移误角度在-50到+50度之间,桨b推力值与偏移误差呈正相关规律,而桨b旋转角度与偏移误差呈负相关规律。此时输出航向角如图12。
船舶在实际航行环境中除了发生航向角偏移,还有可能发生船头偏转运动,就是发生艏摇,所以考虑船头偏移时,需要再引入模糊PID算法。
如图13所示,变化曲线是加入PID算法的螺旋桨曲线。第一开始阶段,船头没有发生偏转,正常航行,推力值不发生变化;第二阶段船头发生逆时针方向偏转,桨a推力先增大,后慢慢减少,桨b推力先减小,后慢慢增大,此时合力距变大且作用方向为顺时针方向,用来抵消船头角度发生的偏转运动;第三阶段图线交叉点表明了船头又出现了顺时针方向的偏移;第四阶段船身归正,双桨推力又达到平衡状态。此时航向角变化如图14。
4 结束语
本研究主要以基于LABVIE软件的模拟仿真为主,讨论了可旋转螺旋桨在无环境干扰和有环境干扰的情况下,研究了横向平移靠泊过程中两支螺旋桨推力和旋转角度的变化规律。实验结果表明采用船尾双旋转螺旋桨能够实现平移航行,对该类船舶操纵运动有一定的参考价值,能够简化靠泊操作流程,增加靠泊效率,提高靠泊的无人化和智能化。不足之处本文初步建立了船体在静水条件下的受力分析及模型建立,但是船舶在水中会受到水流干扰力、风流干扰力、惯性流体力等各種复杂力的存在,所以建立更精确的数学模型,对船舶的控制就会越精准,所以下一步需要不断完善船舶运动的数学模型。
参考文献:
[1]丁杰.智能船,一路好风景[J].中国船检,2019(01):29-34.
[2]张强. 船舶自动靠泊简捷非线性鲁棒控制[D].大连:大连海事大学,2018.
[3]张荣,周毅,赵寅,等.中小型LNG船舶操纵性分析[J].船海工程,2017,46(5):17-21.
[4]雷振山.LabVIEW Express 实用技术教程[J].北京:中国铁道出版社,2004.
[5]杨乐平,李海涛,赵勇.LabVIEW 高级程序设计[M].北京:清华大学出版社,2003.
[6]张悦旺.船舶航向控制系统中多自由度嵌入式控制器的优化设计[J].舰船科学技术,2018,40(22):62-64.
[7]徐国平,张显库.船舶自动舵研究综述[J].中国造船,2013,54(02):191-200.
[8]周蓉.船舶航向自适应PID控制器的设计与应用[D].大连:大连海事大学,2012.
[9]胡春洋,李松霖,李虎.基于Anti-windup-PID算法的智能船航向控制研究[J].电子世界,2018(14):184-185.
[10]吴小平,冯正平,朱继懋.模糊PID策略在AUV控制中的应用[J].舰船科学技术,2007(01):95-98.