建筑铝模板分拣线的仿真优化①
2020-03-23王兆斌张运楚马仁怀
王兆斌, 张运楚,2, 孙 鸽, 马仁怀, 李 明,2
1(山东建筑大学 信息与电气工程学院, 济南 250101)
2(山东省智能建筑技术重点实验室, 济南 250101)
3(山东新活新材料科技有限公司, 烟台 265700)
建筑模板主要是对混凝土结构起着临时性支护功能, 根据土建结构要求, 在钢筋结构的外围组合拼装,从而根据规定的位置和几何尺寸形成混凝土结构和构件, 保持其正确位置, 并承受建筑模板自重及作用在其上的外部荷载, 以确保混凝土在一定时间内成型[1].模板工程是施工过程中非常重要的一段工序, 要求在确保混凝土工程质量、施工安全和施工进度的同时, 尽量降低工程造价.但大多数的工程还是以竹、木模板为主要结构支护材料, 消耗了大量的森林资源.虽然兴起的钢模板在一定程度上减少了竹、木模板的使用量,但自重问题还是限制了钢模板的推广.
建筑铝模板和传统的木质、钢质模板等相比, 在技术和经济上存在一系列明显的优势.建筑铝模板的自重轻, 且模板承受压力的条件好, 方便混凝土进行机械化、快速施工的作业要求[2], 在超高层建筑施工中优势显著.建筑铝模板相比竹、木模板能够多次周转使用, 但是初始投入较高, 每平方米的单价约为1500 元,只有随着周转次数的增加, 使用率提高, 建筑铝模板的平均单价才会逐渐降低[3].图1 给出了建筑铝模板平均单价与周转次数之间的关系.从图中可以看出: 随着周转次数的增加, 建筑铝模板的平均单价会迅速降低并趋于平缓, 当周转次数达到60 次时, 将与竹、木模板持平.所以从整体分析, 建筑铝模板的周转次数越多即利用率越高, 平均单价越低.

图1 建筑铝模板平均单价与周转次数之间的关系
提高建筑铝模板使用次数, 可以从铝模板的设计、加工、分拣打包、物流配送、回收清洗、分类等各方面缩短作业时间, 本文从建筑铝模板的配送分拣环节研究, 探索提高建筑铝模板周转效率的方式方法.由于施工承重柱、墙板或楼梯等混凝土工程中, 每一部分都需要不同的建筑铝模板进行组装支护, 所以必须提前将建筑铝模板按照每一部分的配模清单进行分拣打包, 但是现如今的分拣打包环节完全依靠手工作业, 存在分拣效率低、易出错的问题[4].建筑铝模板分拣主要是针对单个清单的不同模板分拣, 而且由于铝模板形状大小不一, 无法达到规则包装的分拣要求.考虑到建筑铝模板在生产工艺流程中的要求, 铝模板批量生产, 生产完成之后还有一系列的工艺流程, 导致了模板排放的混乱, 无法按配模清单分区排放.针对建筑铝模板分拣的特点, 分拣线按分级分流的方式运行, 可以大大提高建筑铝模板分拣效率.
1 传统物流分拣形式的发展
传统上的分拣作业方式可分为两类, 分别是“人到货”分拣方式和“货到人”分拣方式[5].“人到货”分拣方式是最早出现的方法, 在生产力和科技落后的年代, 货物无法在机械的带动下运动, 所以人们最先开始采用这种方式分拣货物.这种方式是货物只需在仓库中, 分拣人员推着小货车根据订单在仓库中寻找货物, 并将货物运送到订单打包处, 这类方式主要研究的是如何在仓库中以最短的路径配齐货物[6].“货到人”的分拣作业方式是货物在传送带的动力引导下, 被传送到各个工位处, 各工位处的分拣人员根据自己的任务将自己需要的货物分拣到自己的工位处.“货到人”的配送方式工艺难度高, 计划性较强, 集中用户需求后才开始分货, 而且用户需求较稳定, 配送中心具有较强专业性的配送方式, 效率较高, 极大地节约分拣成本.
在“货到人”分拣操作模式中, 分拣线的分流结构有很多种形式, 常见的有推挡式分流系统、引导式分流系统、滑块式分流系统、交叉带式分流系统和人工分流方式[7].以上五种分流方式都是依靠传送带运载铝模板的基础上进行分流的, 能够强制主输送系统上的物品离开而进入到支流输送系统中.
推挡式分流系统主要使用机械结构将主输送系统上的物品以推、挡的方式分流到支流输送系统上, 它的优点是结构简单、造价低, 缺点是对物品侧面直接造成冲击, 对易摩损及较笨重的物品不适用, 图2 为气压缸侧推式分流方式.引导式分流系统使用浮起的链条、皮带、滚筒或轮子将待分流物品抬离主输送系统,而导入支流输送系统中, 它的优点是对分流物品造成的冲击较小, 可处理的物品重量较重, 分类速度较快,但该系统对分流物品底部的状况(外观形状、凸出点等)、分流物品自重对底部产生压力的均匀度和分流物品的高度与宽度比要求较高, 图3 为斜轮引导式分流方式.

图2 气压缸侧推式分流
滑块式分流系统是分拣线各分流处有可以左右滑动的滑杆, 根据分拣任务将货物推移到支流输送系统上以实现分流的目的, 它的优点是适用性强, 对物品产生之冲击力小, 但对于较重物品和形状不规则物品不适用, 图4 为滑块式分流方式.交叉带式分流系统由多个独立的皮带输送单元组成, 每个单元承载单个物件,到达目的分流口时皮带做垂直运动方向运动, 实现运载物品的分流, 它的优点是不受物品外观影响, 均可平稳地进行分拣, 而且单元尺寸小, 分拣格口间距布置密集, 场地利用率高, 但该系统不适合较大尺寸的物品分拣, 图5 为交叉带式分流方式.

图3 斜轮引导式分流

图5 交叉带式分流
2 建筑铝模板分拣方案的研究
建筑铝模板是按设计清单生产的, 而仓库中的旧模板出库也是按清单提货的, 由于铝模板在出厂之前必须刷一种脱模剂, 是为了在建筑混凝土结构成型之后易脱模, 正是这种工艺的实施, 导致了建筑铝模板排放的混乱, 脱模剂干燥以后, 工人必须将建筑铝模板按清单分别拣取归类.而且建筑铝模板的配模清单中, 同一型号的铝模板可能分布在不同区号中, 而建筑铝模板的生产和存储是按批量进行的, 在出库和出生产车间的过程中也需按统计数量批量进行, 考虑到建筑铝模板的生产工艺特点, 在其分拣环节采用“货到人”的分拣作业方式.
分析建筑铝模板的特点, 建筑铝模板材质为铝合金, 重量较重, 其形状又大小不一, 有150 mm×150 mm的小模板, 也有2000 mm×400 mm 的大模板, 在完成分拣识别之后, 不容易将其自动下线, 只能采用人工分流的方式进行导流, 在均衡人工成本和设备成本之后, 拟采用主线分流与分级分拣模式相结合的“八爪鱼”分拣技术, 并将其进行改造成适用于建筑铝模板的分拣方式.
2.1 结构组成
“八爪鱼”分拣技术就是一种形似八爪鱼的分拣平台, 八爪鱼平台分拣线由铝模板导入传送带、8 个连接不同“堆垛暂存区”的路由传送带、作业平台、自动扫码装置、控制系统、显示装置等几部分组成.“八爪鱼”分拣线的立体图及俯视平面图如图6 所示.
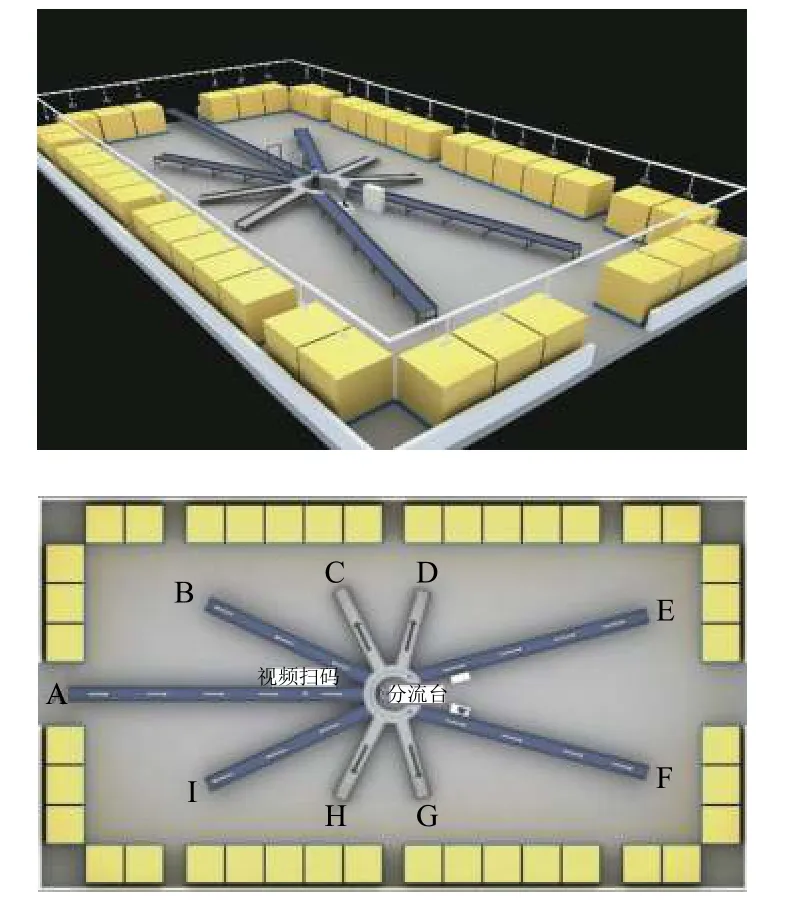
图6 “八爪鱼”分拣线的立体图及俯视平面图
建筑铝模板在分拣过程中采用二维码标签作为身份标识, 识别二维码即可识别建筑铝模板的型号等信息.工人将待分拣铝模板放置到导入传送带上, 传送到“八爪鱼”分拣操作台, 图像扫码装置自动识别铝模板上的二维码, 输入到管理系统获取分配给该块铝模板的分拣道口路由号和堆垛暂存区号, 并自动更新数据库, 触发点亮该分拣道口的分拣指示灯, 并显示该铝模板的“堆垛暂存区号”以及分拣进度.然后由分拣工人手工拣取铝模板放置到对应路由传送带上, 再由堆垛工人拣取放置到指定堆垛区, 并人工或自动复位分拣指示灯及区号显示屏.为减轻分拣员的劳动强度, “八爪鱼”分拣操作台应安装滚珠式琉璃架.
该“八爪鱼”分拣线一共需要设置9 条传送带为运载建筑铝模板提供动力, 至少10 位分拣堆垛工人搬运铝模板, 40 个临时放置已分拣完毕的建筑铝模板托盘,在图6 的俯视平面图中各条传送带已经做好字母标记,A 为主输送系统, 是分拣线的导入传送带, B~I 为路由传送带, 负责将已经分流的建筑铝模板传送到堆垛区.
“八爪鱼”分拣线的控制系统主要包括传送带的动力控制系统和分拣线的信息采集及信号控制系统.分拣线的控制系统主要涉及控制自动扫码装置、显示装置和建筑铝模板配模清单的数据处理等.导入传送带末端的自动扫码装置采用USB 接口的工业相机采集二维码图像, 利用二维码识别软件识别二维码信息.显示装置采用MCGS 触摸显示屏和LED 指示灯, 实时显示分拣作业的状态.
2.2 工作流程
“八爪鱼”分拣线的工作流程可按分拣作业的步骤分为3 个阶段:
(1)投线作业: 生产车间批次生产建筑铝模板, 在刷脱模剂之后, 同一型号的铝模板或不同型号的铝模板堆放在一个托盘上, 叉车将铝模板托盘搬运至导入传送带A 始端, 由工人将一块铝模板搬放到导入传送带A 上, 且保证铝模板贴二维码的面朝上摆放, 然后从托盘取另一块铝模板, 依次重复, 直至将托盘上的铝模板全部搬空, 用叉车将托盘移走.
(2)分流作业: 导入传送带A 将铝模板送至分流台, 分流台上分布B、C、D、E、F、G、H、I 等8 个路由传送带分流道口.导入传送带A 分为5 个动力段,最多可以预存5 个铝模板.导入传送带A 上设置自动扫码装置, 该装置将扫描定位、识别经过的铝模板上的二维码.分流台上的显示装置会显示当前待分流的铝模板型号信息和对应道口方向, 分流台上所对应分流道口上方的指示灯会闪烁提示.分拣工人根据显示装置上的信息核对铝模板, 并将铝模板分流至闪灯道口, 直到本次分流作业完成.
(3)分垛作业: B、C、D、E、F、G、H、I 等8 个路由传送带末端各自对应5 个托盘堆垛位, 每个托盘上方设置数码LED 指示灯, 路由传送带末端设置MCGS 触摸显示屏用来显示提示当前搬运任务和搬运铝模板信息.工人根据MCGS 触摸显示屏上的信息和LED 指示灯核对铝模板, 并将路由传送带末端上的铝模板搬运至对应托盘堆垛位, 直到确认本次分垛作业完成.
“八爪鱼”工作流程的3 个阶段贯穿于整个分拣业务中, 将建筑铝模板按区号堆垛排列, 建筑铝模板分拣线的工作流程如图7 所示.

图7 “八爪鱼”分拣线工作流程图
3 基于Flexsim 的分拣线可视化仿真
Flexsim 是一个面向对象的仿真软件, 三维结构仿真环境与现实相似度极高, 能够对制造业中的物料处理等生产活动工作流的离散事件流程过程可视化仿真研究[8].Flexsim 的建模过程用来模拟仿真现实的生产和物流动态, 发现其中的弊端, 解决方案的瓶颈, 促进生产力的发展[9].较优的物流排产方案不仅保障了生产物料的准时配送, 还能减少设备的空闲率, 使得排产作业合理化[10].
本文提出的建筑铝模板“八爪鱼”分拣线结构, 只是在理论的层次能够解决建筑铝模板的分拣问题, 无法从实际的角度看出该分拣线能否正常稳定地运行.而每种物流方案的选择都必须得到验证, 只有得到实际的验证, 该方案才能应用到实际场景中, 否则即使该方案能够运行, 也会存在一定的瓶颈问题.建筑铝模板的“八爪鱼”分拣线结构中传送带的速度和操作人员分布都可能存在影响分拣效率的因素, 假如从现实建立好的分拣线中去总结瓶颈因素, 不仅影响分拣效率, 还会浪费大量的资源.利用物流仿真软件仿真“八爪鱼”分拣线, 调整分拣线设备的运行参数和分拣人员分布的情况, 使得分拣线各部分之间衔接顺畅, 协调高效运行, 并在现有方案上做出调整优化, 提高分拣效率.
3.1 分拣线可视化模型建立
本文通过对建筑铝模板分拣作业的分析与研究,设计了“八爪鱼”分拣线方案, 在实际制造生产前, 为有效配置资源及数据, 并从全局角度进行统筹规划, 借助Flexsim 仿真软件进行物流状态的实时仿真与产能预测, 找到“八爪鱼”分拣线设计方案的缺陷及不足, 采用合理的策略弥补现有方案的缺陷, 使得“八爪鱼”分拣线能够合理运行, 最大化的提高设备利用率和铝模板分拣效率.
Flexsim 的实体库具有丰富多样的资源类实体, 还有各式各样的临时实体, 方便快捷地模拟“八爪鱼”分拣线.分拣线的仿真模型应该严格按照设计好的实际分拣线结构设计, 以仿真模型模拟分拣线的运行, 根据实验结果分析分拣线的瓶颈问题.本文建立的“八爪鱼”分拣线模型中, 采用发生器实体模拟工厂生产或库存建筑铝模板, 采用暂存区实体模拟待分拣铝模板托盘, 采用处理器实体模拟自动扫码装置, 采用货架实体模拟已分拣完成的铝模板托盘堆垛位.根据“八爪鱼”分拣线的结构特征, 利用Flexsim 仿真软件模拟的建筑铝模板分拣线, 如图8 所示.此模型一共采用了十位操作员模拟分拣堆垛工人进行建筑铝模板的搬运及分流工作, 实体之间的连接均为“输出-输入端口连接”.“输出-输入端口连接”是一个实体的输出端口到另一实体的输入端口, 达到输出输入的目的.实体与操作员之间的连接均为中间端口连接, 采用centerobject()命令进行连接引用, 使用中间端口的目的就是为了引导操作员工作.
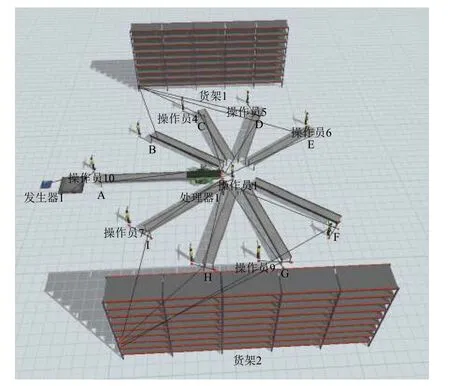
图8 建筑铝模板分拣线仿真图
3.2 仿真模型参数的设定与运行
建立仿真模型时, 需要对各种实体进行参数的设置, 以及实体与实体之间输入输出模式的连接.模型建立开始之前首先对模型单位进行设置, 如表1 所示.然后对各种实体及各实体之间的连接属性做出设置.

表1 分拣线仿真模型单位设置
(1)发生器
模型中利用临时实体box 模拟建筑铝模板的运动,发生器模拟工厂加工建筑铝模板, 为了尽可能的与实际工厂生产情况相似, 对发生器进行设置.选择到达方式为“到达时间间隔”, 并合理设置“到达时间间隔”.从托盘到传送带, 操作员大约每5 s 搬运一块铝模板, 而模型中, 操作员都是在实时搬运, 可以从发生器设置按照每5 s 达到一次暂存区模拟实时情况.一般情况下,发生器的到达时间间隔服从指数分布, 指数分布的概率密度函数如式(1)所示, 需设置均值参数符合操作员搬运时间.在模型中采用类似于指数分布这样的统计分布, 对分拣线中操作员搬运时间的变化进行模拟.将到达时间间隔的分布函数设置为Exponential, 渐位线(Location)为0, 比例(Scale)设置为5, 随机数流(Stream)设置为0.

则随机变量为到达时间间隔, 服从一个常数参数θ=5 的指数分布.
然后指定临时实体的类型和颜色, 在临时实体进入分拣线时, 指定类型值.本文按照设计建筑铝模板的一种墙板组合为例, 一共40 种类型, 类型值的分配服从1 到40 的均匀分布, 即产品是类型1~40 进入分拣线的可能性都一样.在发生器的创建触发器中设置类型值, 点击触发器选项卡, 在创建触发器中增加一个函数, 选择设置临时实体类型和颜色, 临时实体类型服从均匀分布, 均匀分布的概率密度函数如式(2)所示, 以duniform(1,40, getstream(current))实现.

则随机变量为临时实体类型, 服从区间[a, b]上的均匀分布, 本文中即服从[1, 40]上的均匀分布.
(2)暂存区
采用暂存区实体模拟存放建筑铝模板的临时托盘,考虑到建筑铝模板大小不一, 而且还有一定的自重及体积, 一个托盘能够装载50 块建筑铝模板已经到达极限, 所以在暂存区的最大容量处设置50.临时实体流选项中, 将输出选项中的发送至端口选择为“第一个可用”, 选中使用运输工具, 则current.centerObjects[1]函数生效.此暂存区与下游的传送带中间以输出-输入端口连接, 暂存区与此处的操作员1 进行中间端口连接.
(3)处理器
处理器的容量设置为1, 加工时间设置为2, 与导入传送带A 的运动速度相同, 处理器的临时实体流中,输出设置选中使用交通工具, 按查询全局表的方式发送至端口, 先添加一个全局表Route, 路径为“工具-全局表-添加”, 再设置暂存区的“临时实体流”, 选择“输出-发送至端口-查询全局表”, 表格名称选择刚才所建立的全局表的名称Route.注意将操作员和处理器都从1 开始进行编号, 防止全局表的设置无效.表2 为处理器输出的Route 全局表.

表2 处理器输出的Route 全局表
(4)传送带
导入传送带A 的长度设置为8 m, 最大容量为4,以间隔值为间隔规则, 设置间隔值为2, 加上处理器上的1 容量, 就能模拟导入传送带A 的5 个动力段, 即导入传送带A 上的建筑铝模板最大值为5, 导入传送带A 与处理器的连接为输出-输入连接.路由传送带的长度设置为6 m, 最大容量为3, 以间隔值为间隔规则, 设置间隔值为2, 模拟路由传送带上的3 个动力段, 即路由传送带上的建筑铝模板最大值为3, 处理器与路由传送带之间的连接为输出-输入连接, 但此处有操作员搬运, 处理器与操作员之间为中间端口连接.
(5)货架
模型中利用5 列的货架模拟分拣完成建筑铝模板的托盘, 每一条路由传送带上的铝模板分别放置到每一层, 这样就可以减少模型中使用的实体数量, 实现对应路由传送带上的铝模板放置到货架对应层, 可用查询全局表实现, 而每一层的5 个块分别放置一条传送带上的5 块铝模板.路由传送带的临时实体流输出中,发送至端口设置成匹配临时实体类型, 即可解决两条传送带同时设置指定端口冲突的问题.
3.3 仿真结果的统计与分析
模型设置完成之后, 点击重置, 使系统初始化, 然后点击运行, 调整运行时间28 800 s, 使得模型符合每天8 小时工作制.使用Dashboard 面板查看模型中各操作员的工作状态, 系统模型中的10 位操作员工作状态如图9 所示.
从操作员工作状态饼状图中可以看出, 操作员1和操作员10 的忙碌率较高, 到达72%和76%, 反过来说空闲率很低, 而其他操作员却空闲率较高, 导致分拣系统分拣效率较低, 单纯从分拣线考虑, 提高分拣线运转速度, 则操作员1 和10 的忙碌率更高, 无法从根本解决该系统存在的瓶颈问题.所以从Flexsim 仿真模型中发现了该系统存在的瓶颈问题, 找到真正的解决方案, 既降低操作员1 和操作员10 位置的忙碌率, 又能提高其他操作员的忙碌率, 使得在一定时间内, 分拣系统分拣更多的铝模板, 可从根本上解决分拣系统的瓶颈问题.
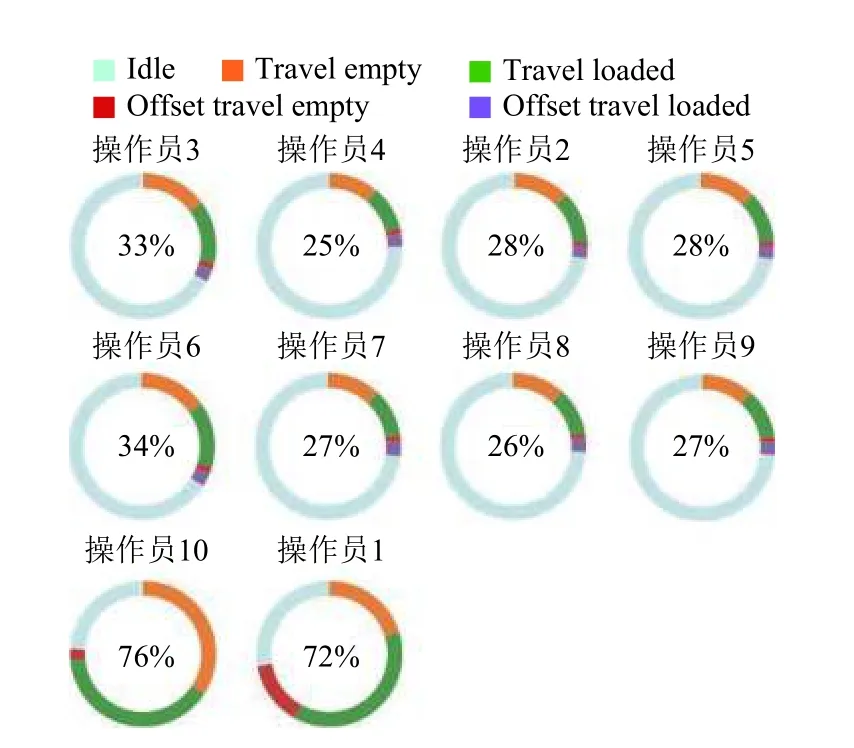
图9 系统模型中操作员的工作状态
3.4 模型改进及结果分析
长时间运行之后, 从模型的状态中可以看出操作员10 的忙碌率达到76%, 主暂存区的建筑铝模板处于积压状态, 操作员1 的忙碌率达到72%, 导入传送带也是处于满负荷状态, 而路由传送带是少负荷状态, 堆垛区操作员的忙碌率也较低, 造成了分拣线的前端满负荷, 后端少负荷的瓶颈问题, 由此可以看出该分拣线在此种状态下必然影响分拣效率.为了解决该分拣线的瓶颈问题, 可以从均衡分拣线前后端负荷差异的方面考虑, 将分拣线中连接点的堵塞问题疏通.而分拣线中堵塞的连接点就是操作员10 和操作员1 的位置, 只有解决这两个点的堵塞问题, 才能提高该分拣线的分拣效率.
为了解决系统模型中操作员任务分配不均, 忙碌状态不同的瓶颈问题, 本文从Dashboard 面板中分析得知, 操作员10 和操作员1 相比其他操作员过度忙绿,将会导致过多的操作员空闲率较高, 系统运行效率不高, 为解决这一问题, 本文从操作员10 的位置再添加一位操作员甲用来帮助操作员10 搬运铝模板, 提高系统运行效率, 解决操作员10 过度忙碌而其他操作员空闲率较高的问题.需要使用分配器对任务请求进行排队并将它们分配给一个空闲的操作员, 首先添加一个任务分配器, 为了使用分配器指挥操作员, 分配器必须与使用操作员的实体进行中间端口连接, 中间端口位于实体底部的中间位置.任务分配器与两位操作员之间分别进行输出-输入端口连接.系统模型改动情况如图10 所示.在操作员1 的位置处做出和操作员10 处相同的处理添加一位操作员乙, 就能解决操作员1 忙碌的问题, 从而解决现行模型效率低的问题.

图10 系统模型改进部分示意图
模型设置完成之后, 重置初始化, 然后运行模型,调整模型运行时间28 800 s, 使用Dashboard 面板查看模型中各操作员的工作状态, 系统模型中的12 位操作员工作状态如图11 所示.
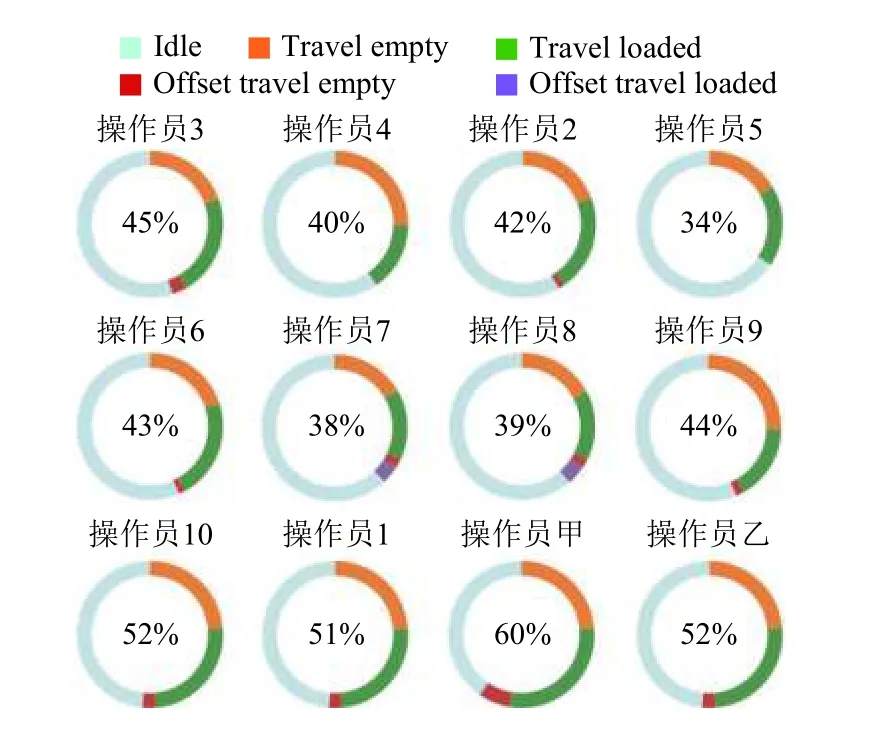
图11 改进的系统模型中操作员的工作状态
从改进的系统模型工作状态图中可以看出, 在增加了两位操作员之后, 不仅操作员1 和操作员10 的忙碌率降低, 而其他操作员的忙碌率也明显上升, 该分拣线前后端的负荷差异得到有效改善, 连接点的堵塞问题得到有效解决.通过统计分拣线模型改进前后分别运行28 800 s 分拣的数量, 如表3 所示, 模型改进前在规定时间内分拣数量为2976 块, 而改进后的模型分拣数量达到4114 块, 比改进前的分拣数量提高38%左右, 说明在一定的时间内, 分拣线分拣的建筑铝模板数量明显上升, 在增加了两个人力成本的条件下, 分拣线的分拣效率提高.

表3 分拣线模型改进前后的分拣数量对比
4 结语
本文分析了建筑铝模板的特征和当前物流分拣形式的发展, 设计了一条“八爪鱼”结构形式的分拣线, 适用于建筑铝模板配模清单的分拣作业[11].根据“八爪鱼”铝模板分拣线的工艺流程要求, 利用Flexsim 仿真技术建立了分拣线的仿真模型, 配置了仿真模型的运行参数, 在结合实际的情况下, 设定8 小时的运行时间,得到了分拣线运行的工作状态, 并通过工作状态饼状图分析了分拣线的瓶颈问题, 并通过优化工艺流程调整操作员的分布, 解决了该分拣线的瓶颈, 提高了分拣线的运行效率.
