并联式混合动力汽车整车控制策略研究*
2020-03-22朱建伟冯迎霞李殿凯王贤海孔祥创
姜 炜,朱建伟,冯迎霞,李殿凯,王贤海,孔祥创
(上汽集团商用车技术中心,上海 200438)
0 引言
混合动力汽车兼具传统汽车和纯电动汽车的优势,既无纯电动汽车面临的“里程焦虑”,又相比传统汽车有着较好的燃油经济性和排放性能,所以混合动力汽车一直被广泛关注,市场前景广阔。目前市场上的混合动力汽车主要有油电混合动力汽车和气电混合动力汽车两类,乘用车市场上以油电混合动力汽车居多,商用车市场上则是以气电混合动力汽车为主。在混合动力系统构型及其相关动力部件参数确定之后,整车控制策略决定着混合动力汽车的经济性,同时还影响着汽车的行驶平顺性。
目前,实车上的整车控制策略大多是基于规则的控制策略,其核心是依据工程开发经验和零部件的稳态效率曲线等因素制定一系列规则,从而确定发动机和电机之间的动力分配[1-2]。整车控制策略具有可靠及易实现等特点,因而被广泛应用于实车控制当中。
混合动力汽车具有多种动力工作模式,这就涉及到不同模式之间的相互切换。在模式切换过程中,若控制不当,则很有可能造成传动系统传递的扭矩突变,影响车辆的平顺性[3-4]。文献[5]分发动机启动、调速和动力接入三个过程进行扭矩协调控制。文献[6]针对纯电动驱动模式切换至发动机驱动模式的过程,利用模糊PID算法进行离合器控制和扭矩协调控制,可有效提高模式切换过程的平顺性。
本文以某并联式混合动力汽车为研究对象,详细分析其构型特点,在此基础上,基于车辆经济性和平顺性等考虑,分怠速充电控制、发动机启动控制、离合器转速同步控制、动力模式控制和能量回收控制五个方面完成稳态模式控制和瞬态模式控制。最后,针对所提整车控制策略进行实车测试,以验证其控制效果。
1 动力系统构型
图1描述了研究对象的混合动力系统构型。

图1 混合动力系统构型
该混合动力系统由发动机、电机、混合动力变速器、两档变速器和离合器等部件构成,其中,混合动力变速器是在传统5档变速器的基础上增加充电档(Charge档,简称C档)得到的,两档变速器分H档(High档,高档)和L档(Low档,低档)。通过控制发动机、电机、混合动力变速器档位以及离合器的状态,可以实现纯电驱动模式、怠速充电模式、混合驱动模式等多种动力系统工作模式。
该混合动力系统在结构上兼容P2和P3两种并联结构[7],使得能量流动的控制和能量消耗的优化有了更大的灵活性和可能性。能量流的控制需要各动力系统工作模式之间相互协调,涉及动力系统模式控制,包括稳态模式控制和瞬态模式控制。一个合理有效的整车控制策略既应能保证车辆的动力性及经济性,又应满足驾驶平顺性要求。
2 整车控制策略设计
依据车辆不同的控制状态,整车控制策略主要分为怠速充电控制、发动机启动控制、离合器转速同步控制、动力模式控制和能量回收控制五个方面。另外,根据驾驶员的选择,车辆有三种不同的驾驶模式,分别为Eco模式(经济模式)、Normal模式(正常模式)和Sport模式(运动模式)。
2.1 怠速充电控制
整车控制器上电或被唤醒之后,将进行故障检测,检测无故障发生后,车辆进入准备状态。接着进行相关操作,车辆将进入高压准备状态,此时整车高压上电工作完成。SOC(State of charge,表征电池电量)较低时,发动机启动并输出一定数值的扭矩,电机工作在发电状态,整车进入怠速充电模式。在该模式下,控制混合动力变速器挂入C档,两档变速器挂入空档,离合器闭合。值得注意的是,怠速充电分为P/N(驻车/空档)档怠速充电和D(前进)档怠速充电两种情况。出于安全考虑,驾驶员踩下制动踏板达到一定开度后,才能进入D档怠速充电模式。怠速充电功率可通过电池SOC查表求得,且查表值依据不同驾驶模式进行区别设置;发动机以一定的目标怠速转速按照设定的充电功率输出动力,带动电机发电并存储到电池中。
2.2 发动机启动控制
对发动机启动过程的控制称为发动机启动控制,发动机启动分为两种情况,一是原地启动发动机,二是行车启动发动机。
原地启动发动机是指车辆在静止状态下启动发动机,进入该模式后,控制混合动力变速器挂入C档,离合器闭合,并请求电机输出合适扭矩启动发动机。电机接到扭矩请求信号后,输出扭矩快速拖拽发动机至启动转速,发动机点火启动。
在纯电行驶过程中,当需求扭矩超过设定限值时,会触发发动机启动请求,进入行车启动发动机模式。进入该模式后,控制混合动力变速器进入合适档位,两档变速器保持原状态,控制离合器缓慢闭合,利用滑摩扭矩启动发动机,此启动方式称为slip start(滑摩启动)。为了减少启动过程中发动机扭矩给传动链带来的冲击,需要注意控制发动机喷油时刻。行车启动发动机过程中,如果车速较高,车辆自身的惯性会拖动发动机启动,反之,电动机需要进行扭矩补偿,通过加速踏板开度补偿的方式实现。
2.3 离合器转速同步控制
车辆行驶过程中,从离合器分离到发动机转速与变速箱输入轴转速同步后离合器锁死的过程定义为离合器转速同步控制。离合器转速同步控制分为两种情况:①发动机处于启动状态,车辆由静止状态开始起步,混合动力变速器挂入一档,两档变速器挂入L档,离合器处于分离状态,直至车速上升至接近1档稳定车速时,开始控制离合器滑摩直至转速同步闭合,完成离合器转速同步控制;②车辆行进过程中,通过slip start方式启动发动机后,也会进入离合器转速同步控制,在这种情况下,混合动力变速器保持在合适档位,两档变速器保持原有档位,控制发动机扭矩使发动机转速尽快达到同步点,同时控制离合器闭合扭矩,以免发动机转速发生突变,最终离合器同步闭合,完成离合器转速同步控制过程。
2.4 动力模式控制
(1)纯电动模式。当电量较高、车速较低或驾驶员需求扭矩较低时,车辆将工作在纯电动模式,这样不仅有利于降低能耗,还可减少排放。在纯电行驶过程中,基于电机需求扭矩与驾驶模式获得两档变速器的升档车速和降档车速。实际车速到达对应车速时,进行相应的升档或降档操作。
(2)Creep模式。驾驶员不需要操作加速踏板和制动踏板,车辆便以较低的稳定车速行驶,此模式称为Creep模式(蠕行模式)。Creep模式可细分为发动机Creep模式和电机Creep模式两种,通过PI控制方式进行Creep扭矩计算,即根据制动踏板开度查表得到Creep的目标车速,根据目标车速和实际车速的差值进行查表得到PI控制的P项扭矩系数和I项扭矩系数,计算方法如公式(1)所示:

其中:TC为车辆蠕行时的需求扭矩;TP为比例项扭矩;TI(t)为t时刻积分项扭矩;P为比例项扭矩系数;Δv为目标车速与实际车速的差值;I为积分项扭矩系数;λ为计算步长;TI(t-1)为t-1时刻积分项扭矩。
(3)发动机单独驱动模式。当车速较高时,发动机配合变速箱驱动车辆,将获得较好的燃油经济性。在该模式下,与传统车辆的控制方式无异。
(4)联合驱动模式。当车辆处于爬坡或急加速等大功率需求工况时,在电池放电功率允许的范围内,电机会输出扭矩,协助发动机驱动车辆。
(5)行车充电模式。发动机输出的扭矩一部分通过混合动力变速器驱动车辆行驶,另一部分通过两档变速器带动电机发电。此时,发动机输出扭矩Te为:

其中:Treq为需求扭矩;Tch为折算到发动机端的发电扭矩。
2.5 能量回收控制
根据制动踏板开度的大小,制动控制可分为滑行制动控制和刹车制动控制。
(1)滑行制动控制。从节约能量和保持驾驶感觉的角度出发,本文提出滑行制动控制模式。驾驶员个体的差异会导致对同一滑行制动强度的感受程度不同,因此滑行制动能量回收等级设为高、中、低三个等级,驾驶员可以依据自己的驾驶习惯和驾驶感觉,设置滑行制动能量回收等级。值得注意的是,自适应巡航系统(Adaptive Cruise Control,ACC)开启的时候,不进行制动能量回收。
(2)刹车制动控制。驾驶员踩下制动踏板时,利用电机对制动能量进行回收,原本部分以热能方式消耗掉的能量被转化为电能,待车辆后续使用[8]。研究对象装备的制动系统可实现再生制动力与机械制动力解耦,这将很大程度地提高能量回收率。另外,车辆装备了电子稳定系统(Electronic Stability Program,ESP),刹车制动时如果ESP系统介入,那么再生制动目标扭矩根据ESP目标制动扭矩计算得到。否则,根据车速、电池充电能力、制动踏板开度等因素,计算再生制动扭矩。再生扭矩计算流程见图2。

图2 再生扭矩计算流程
3 实车测试与结果分析
为了验证本文所提控制策略的可行性和有效性,进行实车试验,主要考察怠速充电、Creep模式和离合器转速同步控制模式等典型工作模式,试验样车如图3所示。

图3 试验车辆
3.1 试验步骤
(1)在MATLAB/Simulink环境中搭建整车控制策略 模型,并 通 过 MATLAB 的 RTW(Real-time Workshop,实时工作间)自动生成应用层代码。
(2)使用专业工具将应用层代码与底层代码集成起来,生成a2l文件和hex文件,a2l文件描述了控制器内部变量存储地址等信息用于标定和测量,hex文件则是程序编译后的可执行文件。
(3)使用INCA软件进行程序刷写,与INCA配套使用的测试设备如图4所示,将其与车辆的OBD(On board diagnostics,车载诊断系统)接口连接,即可进行程序刷写。
(4)在INCA软件中选择需要测量的变量,进行相关操作,即可开始监测和存储。
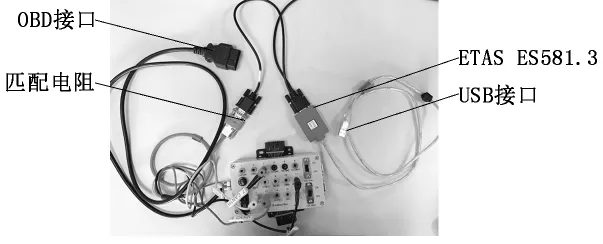
图4 测试设备
3.2 试验结果分析
3.2.1 怠速充电模式
怠速充电模式的试验结果如图5所示,混合动力变速器挂入C档,离合器闭合,电机输出正扭矩拖动发动机至启动转速,发动机点火启动。随后车辆进入怠速充电模式,发动机以恒定目标转速(约1 100r/min)输出扭矩,电机则以负的恒扭矩(约-30Nm)发电。从测试结果来看,怠速充电模式的控制效果符合预期要求。
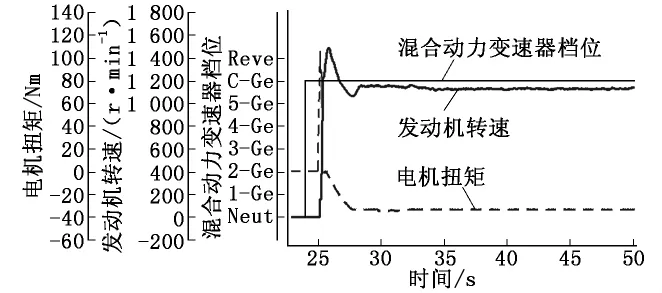
图5 怠速充电模式试验结果
3.2.2 Creep模式
电机Creep模式的试验结果如图6所示。车辆以6.5km/h左右的车速稳定行驶,控制效果良好,符合预期要求。

图6 电机Creep模式试验结果
3.2.3 离合器转速同步控制模式
图7为离合器转速同步控制模式的试验结果。图7中,离合器状态取值为1时表示分离状态;取3时表示滑摩状态;取4时表示闭合状态。在离合器闭合期间,车速无明显波动,发动机转速变化平缓,控制效果良好,满足期望要求。
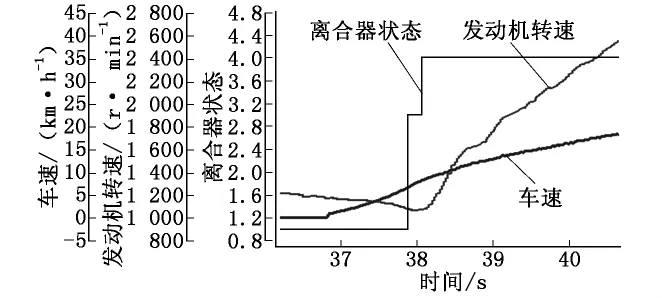
图7 离合器转速同步控制模式试验结果
4 总结
本文详细分析了某并联式混合动力系统构型特点,着重考虑车辆行驶平顺性,制定了整车控制策略,包括稳态工作模式控制和瞬态工作模式控制,主要分为怠速充电控制、发动机启动控制、离合器转速同步控制、动力模式控制和能量回收控制五个方面。最后,针对一些典型工作模式如怠速充电模式、Creep模式和离合器转速同步控制模式进行了实车测试。测试结果表明,控制效果良好,满足预期要求。
