高海拔地区无人机巡检系统技术条件研究
2020-03-22涂苏格余艺娟
涂苏格,陈 洁,余艺娟,陈 晨
(国网湖北送变电工程有限公司,湖北 武汉430077)
0 引言
对于旋翼类飞行器而言,在螺旋桨转速不变的情况下,空气密度越小,飞行器获得的升力越小。随海拔高度上升,空气密度逐步降低,在海平面时空气密度为1 kg/m3,上升到海拔5 000 m 后气温会降至-20°C,空气密度仅为海平面空气密度的一半,约为0.58 kg/m3。通过计算可知,无人机即使保持同样动力输出,所得到的升力也仅为海平面升力的60%左右[1-3]。当飞行器飞到海拔5 km 的高度,那么它必须多消耗40%的功率,才能保持与低海拔地区相同的推力,因此,在低海拔地区可以正常飞行的飞行器,可能会在高原地区无法起飞,或者发生坠机事故[4-6]。
锂聚合物电池因其具有能量高、小型化、轻量化等特点,在无人机尤其是旋翼无人机上具有高度的应用,其中,温度是影响锂电池性能的主要参数,在电池的所有检测项目中,都要求注明温度,原因就是温度对电池性能影响比较大,包括电池的内阻、充放电性能、安全性、寿命等[7-9]。
1 电池放电能力
当电池暴露在低于15°C的环境下时,电池的化学物质活性显著降低,其内阻增大,导致放电时电压降加大[10-12]。自重较大的飞行器,本身就需要更大的电流来维持动力,在高原地区,由于空气稀薄,气压低,飞行器需要更高的电机转速来维持动力,电池输出电流会进一步加大,当电压大幅下降(单电芯低于3 V)时,存在以下两点风险[13-15]:
1)电池放电能力下降,不能满足无人机大电流放电的需要。
2)飞机续航时间明显缩短,对飞行时间估计不足,容易导致坠机事故。
图1为不同温度条件下,锂电池放电曲线示意图,可以看出,当温度降到-20°C时,电池只能放出其标称容量约一半的电量。
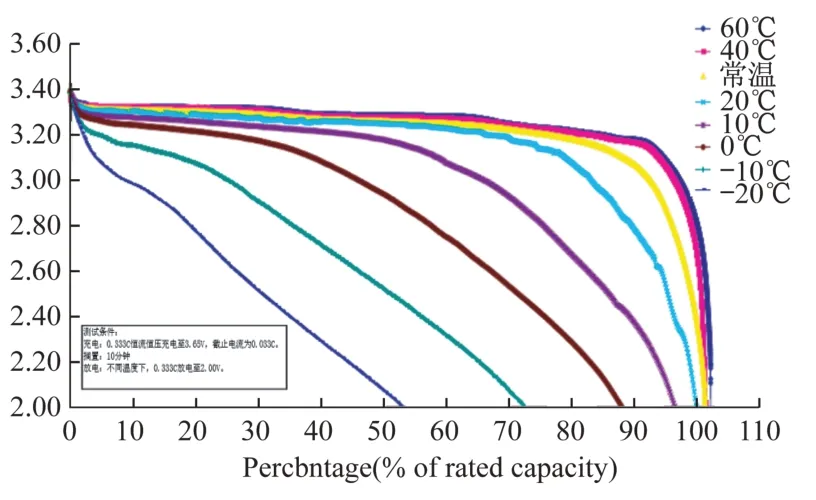
图1 不同温度下锂电池放电示意图Fig.1 Schematic diagram of lithium battery discharge at different temperatures
2 无人机结构优化
无人机在满足使用要求的前提下,尺寸紧凑且重心位置合理,则机动性与抗风能力越好,在相同配置下,能达到更为理想的续航时间与操控性能[16-18]。无人机紧凑化设计主要体现在:
1)合理的结构设计
机体设计:旋翼和机体半径关系如图2 和式(1)所示。
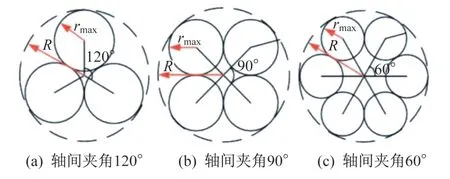
图2 多旋翼机体半径与最大旋翼半径示意图Fig.2 Schematic diagram of multi-rotor body radius and maximum rotor radius

实验表明,当桨与桨之间距离从一个桨半径到0.1个桨叶半径变化时,气流对飞行器整体性能影响较小,因此,为了使飞行器结构紧凑,可使rmax=1.05rp~1.2rp在合理的重心位置。
当阵风吹来,因为螺旋桨柔性诱导的来流会产生阻力[19-21]。如果多旋翼重心在下,那么阻力形成的力矩,会促使多旋翼俯仰角朝发散的方向发展,直至翻转。若多旋翼重心在上,那么阻力形成的力矩,会促使多旋翼俯仰超0°方向发展。因此,当多旋翼受到外界风干扰时,重心在桨盘平面的上方可以抑制扰动[22-24]。如图3所示。
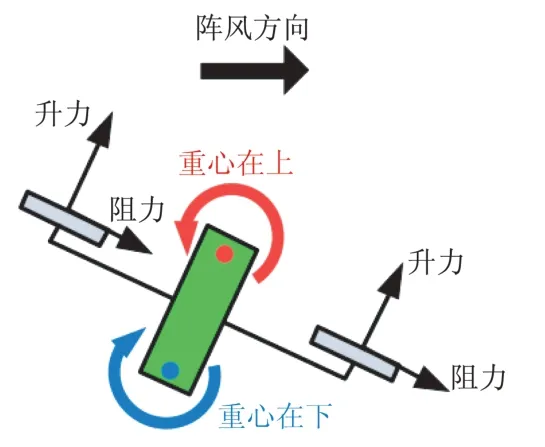
图3 风干扰情形多旋翼无人机示意图Fig.3 Schematic diagram of multi-rotor UAV under wind interference
2)动力配置
多旋翼无人机的螺旋桨分为两种类型,平原螺旋桨与高原螺旋桨,高原螺旋桨直径较大、螺距较大,螺旋桨尺寸越大,电机带动螺旋桨需要的扭力也越大。在高原地区,为了弥补因空气密度下降带来的升力损失可采用如下两种方案[25-27]:1)增大电机扭力,换用尺寸更大的螺旋桨;2)增加螺距,提高螺旋桨升力系数。
3 测距技术优化
获取目标相对无人机的三维信息,操控手准确判断目标,提高巡检安全性和准确性,难点在于获取目标的深度信息[28-30]。在此,通过不同输电铁塔的标准规格与无人机传回视频图像的影像长度关系,确定相机伪相距,由伪相距与实务的比例关系,即可得到任意时刻的深度信息。同理,根据相关比例关系可获取其余2个方向的距离信息,综合即可得到目标的三维信息。深度信息测试原理如图4所示:

图4 深度信息获取原理图Fig.4 Principle diagram of depth information acquisition
基于计算机视觉的三维目标跟踪,目的在于确定目标相对于无人机的三维位置,帮助操控手准确判断目标,提高巡检安全性和准确性。此研究点的关键在于获取绝缘子等目标在图像中的深度信息。为此,本文提出一种伪相距概念。基于伪像距的测距方法,具体步骤分为两块:伪像距测定过程以及测距过程,主要针对相机视频无线传输后,根据接收显示器影像尺寸,来计算相机镜头与目标物之间距离的过程。其原理是根据相机成像原理,假设存在一个类似相机像距的常量m(本文定义该假设常量为伪像距),伪像距m 一定与无线传输后的接收显示器上影像大小S、目标尺寸L以及物距d存在对应关系,得到伪像距的计算公式为:

那么在伪像距已知的情况下,根据上式可以得到相机镜头与目标物之间的距离d,则基于伪像距的测距计算公式为


图5 基于视觉的深度信息原理图Fig.5 Schematic diagram of depth information based on vision
步骤1:伪像距测定
1)调整相机焦距f,并固定相机焦距不变。
2)确定目标尺寸S。
3)确定物距d。
4)测量视频无线传输接收显示器上目标影像尺寸L(此步骤可以采用实际的长度工具进行物理测量,也可以通过图像识别的方法,计算图像中目标物影像的像素尺寸)。
5)根据公式

计算伪像距m。
6)重复步骤二至步骤五多次,求伪像距的加权平均值m。
步骤2:深度信息获取
1)在测得伪像距m的前提下,相机焦距为伪像距测定过程中的焦距,并保持固定不变,且使用与伪像距测定过程中相同的相机视频无线接收显示器。2)确定固定的目标物尺寸S。
3)在相机镜头不断改变与目标物之间的距离时,对相机视频无线接收显示器上的影像尺寸L进行测量(此步骤可以采用实际的长度工具进行物理测量,也可以通过图像识别的方法计算图像中目标物影像的像素尺寸)。
4)根据基于伪像距的测距计算公式(4),可以得到相机镜头与目标物之间的实际距离。
步骤3:其余二维平面信息获取
获取深度信息后,其余二维信息可根据目标在成像中的位置距离,采用与深度信息获取相同的原理计算。
4 无人机规格要求
1)传统巡线无人机操纵要求
传统巡线无人机是通过飞行手与云台手的相互配合,对杆塔的巡视点进行巡视。对于操纵手和云台手的操纵能力要求非常之高,需要操纵员长期的飞行配合和经验积累。
2)巡线无人机平台局限
传统巡线无人机由于巡线要求拍摄样片的质量高,所以不得不采用传统的相机进行采样。传统相机由于体积、重量大,小型的无人机无法承载,所以通常巡线无人机的轴距都很大,导致耗电量的增加,可能在巡视一些较为复杂的杆塔时,一块电池还不够,这使得在一些地理条件复杂的山区,给巡线工作带来很大的影响。
3)高海拔地区地理环境局限
在高海拔地区,由于地理环境恶例,或海拔高度高、或路况复杂。这种恶劣的环境使得无人机机型不能有太大的规格。
基于上述问题,针对高海拔地区的无人机电力巡检工作,这些无人机应采用小型化、模块化设计,以便于携带。具体规格要求如下:
1)小型化设计。多旋翼规格应采用小型化设计,考虑到轴距增加会带来桨叶增大。建议采用轴距为1 m以下的无人机。
2)模块化设计。无人机应采用模块化设计,以方便携带,如:机臂、螺旋桨、云台、电池可拆卸。
3)集成化飞机上的一些电路,避免一些线路暴露在外,减少飞机自身电路磁场的干扰。
5 无人机飞行性能技术条件
5.1 高海拔地区电力巡检无人机导航精度要求
多旋翼无人机电力巡检目的是为了拍摄输电线路及铁塔照片,包括绝缘子、销钉、导线、通道等上百个对象。要求照片能够拍摄铁塔及周围环境的所有信息。同时,对于销钉级别的缺陷,要求无人机拍摄图像分辨率极高。为此,在电力巡检过程中,要求无人机做如下动作:
1)距离铁塔较近飞行;
2)为了拍摄铁塔两侧照片,要求无人机跨线飞行;
3)需要在铁塔单侧不同高度拍摄多组照片,对高度定位要求较高。

图6 无人机同塔双回现场作业流程图Fig.6 Field operation flow chart of UAV double-return on the same tower
基于上述特点,要求无人机在导航精度方面具备如下要求和技术条件:
1)对于手动操控巡检无人机
手动操控模式下,外控手需操控无人机飞至目标区域悬停,要求无人机稳定悬停后,再开展无人机拍照动作。若高度出现偏差,可通过人工操控达到目标区域。因此,具体悬停精度一般为:垂直方向±0.5 m,水平方向±1.5 m。
2)对于自动巡线无人机
自动巡检无人机要求无人机按照提前设定好的飞行航线飞行。比如,要求无人机飞行50 m 的高度,则要求无人机自动飞行至50 m 高度。因此,此种模式下,飞行要求无人机导航定位精度相对非常高,尤其是高度方向上的导航精度。若高度方向上,导航定位精度达不到要求,则不能自动完成理想的拍摄任务。这种飞行模式下,无人机导航定位精度的要求为水平和垂直方向的导航定位精度均达到cm级别。因此,这种模式下的导航系统通常采用差分定位方式。
5.2 高海拔地区无人机抗风能力与海拔、电池要求
从地理角度看,我国幅员辽阔,输电线路分布广泛。其海拔高度分布最高可高达4~5 km。同时,高海拔地区常年多风、低温环境也严重考验无人机性能,包括电池活性、无人机气动性能等。这些区域对无人机的主要影响包括:
1)高空空气稀薄,一方面会让螺旋桨的效率下降;另一方面也会让动力系统的效率下降。
2)高海拔地区低温环境严重影响电池活性,锂电池对0°C~40°C 这个区间的温度并不敏感,然而一旦温度超过这个区间,寿命和容量就会打折扣。
3)高海拔地区常年多风,影响无人机飞行稳定性。
6 结语
在高海拔地区巡检的无人机应满足如下要求:
1)飞行的海拔高度。根据输电线路分布情况,要求无人机可飞行最大海拔高度达到5 000 m 为宜。当然,针对不同地区巡检工作,无人机配置需求也不同,可还针对不同区域选择不同定位无人机。
2)抗风性要求。结合高海拔地区输电线路所处环境分布情况。要求无人机抗风性能越高越好。当前国内外无人机实际飞行性能,要求无人机抗风性能达到6级以上。
3)电池性能要求。针对高海拔地区电力巡检,要求无人机电池选用能量密度高、活性强的电池,或采用燃料电池等新型电池作为动力来源。同时,对低温环境下,电池应注意采取保暖措施。