跨坐式单轨车辆的临界横向力与曲线限速
2020-03-20任利惠季元进
张 让,任利惠,季元进
(同济大学 铁道与城市轨道交通研究院,上海 201804)
跨坐式单轨列车的主要优点之一是曲线通过能力强,最小通过曲线半径在50 m左右。跨坐式单轨车辆的导向轮和稳定轮水平钳住轨道梁侧面,起着导向和稳定车辆的作用[1],车辆在通过曲线路段时,由于超高、离心力和轨道不平度的存在,导向轮、稳定轮的径向力会发生较大变化,走行部的稳定轮或导向轮可能会离开轨面;车辆的曲线通过性方面,导向轮的受力情况是评价其运行稳定性的主要指标[2]。文献[3]表明导向轮和稳定轮需要设置一定的初始预压力以确保跨坐式单轨车辆能够稳定运行,文献[4]通过建立车桥系统的空间耦合振动模型,说明了稳定轮预压力对车辆系统的响应影响很大。针对如何对导向轮和稳定轮的预压力进行合理取值,文献[5-6]通过建立跨坐式单轨车辆的多体动力学模型进行仿真计算,但是没有给出用于指导车辆设计的明确数学公式。
一方面,要对跨坐式单轨车辆的导向轮和稳定轮设置合理的预压力,确保车辆安全稳定地通过曲线路段;另一方面,也应对单轨车辆通过曲线时的速度进行限制。目前,关于跨坐式单轨车辆的曲线限速通过参照轮轨系统的曲线限速公式进行限制[7]。车辆曲线通过的速度限制,不仅取决于脱轨安全性和倾覆稳定性等指标,同时也受限于运行的舒适度。车辆通过曲线时产生的离心加速度也直接影响乘坐舒适度。未平衡的离心加速度往往使旅客感到不适,甚至造成旅客晕车[8]。因此,单轨车辆的曲线限速要考虑车辆的未平衡离心加速度和舒适度之间的联系。
本文从车辆的乘坐舒适度角度讨论单轨车辆的曲线限速问题。采用达朗贝尔原理将单轨车辆通过曲线的动力学问题转换为静力学问题,根据稳定轮刚刚脱离轨面这一临界状态,推导临界横向力和稳定轮预压力之间的关系公式,得出未平衡的离心加速度与稳定轮预压力之间的关系。在此基础上,从车辆乘坐舒适度的角度讨论稳定轮预压力的合理取值问题,分析稳定轮预压力、轨道梁超高率以及曲线半径与最大曲线限制速度和最小曲线限制速度之间的关系。
1 临界横向力
1.1 车辆受力分析
当车辆行驶在圆周曲线路段时,向心力给车辆提供一个指向圆心的加速度,根据达朗贝尔原理,把车辆通过曲线的动态问题转换为静力学平衡的问题进行分析求解。
车辆以恒定速度通过圆曲线路段时的受力分析,见图1,以穿过轨道梁表面中心并垂直于轨道梁表面为z轴,以轨道梁上表面水平线为y轴,建立直角坐标系;车辆模型主要包括车体横移yc、车体侧滚φc、转向架横移yb和转向架侧滚φb共四个自由度,由于转向架质量远小于车体质量,故将惯性力全部施加在车体质心上。
当车体在惯性力Fc作用下发生倾斜后,车体和转向架重力的垂向分力变化量很小,因此可以忽略车体和走行部构架浮沉位移量的变化。将二系悬挂装置等效为成线性弹簧,通过计算将其两边的横向刚度合成一个总刚度Ksy[9],因只针对车辆运行稳定性和舒适性,为减少建模的自由度,可以将跨坐式单轨车辆的轮胎线性化[10]。以图1所示的车辆受力模型为研究对象,此时导向轮和稳定轮与轨道梁处于接触状态,根据达朗贝尔原理,可列以下平衡方程:
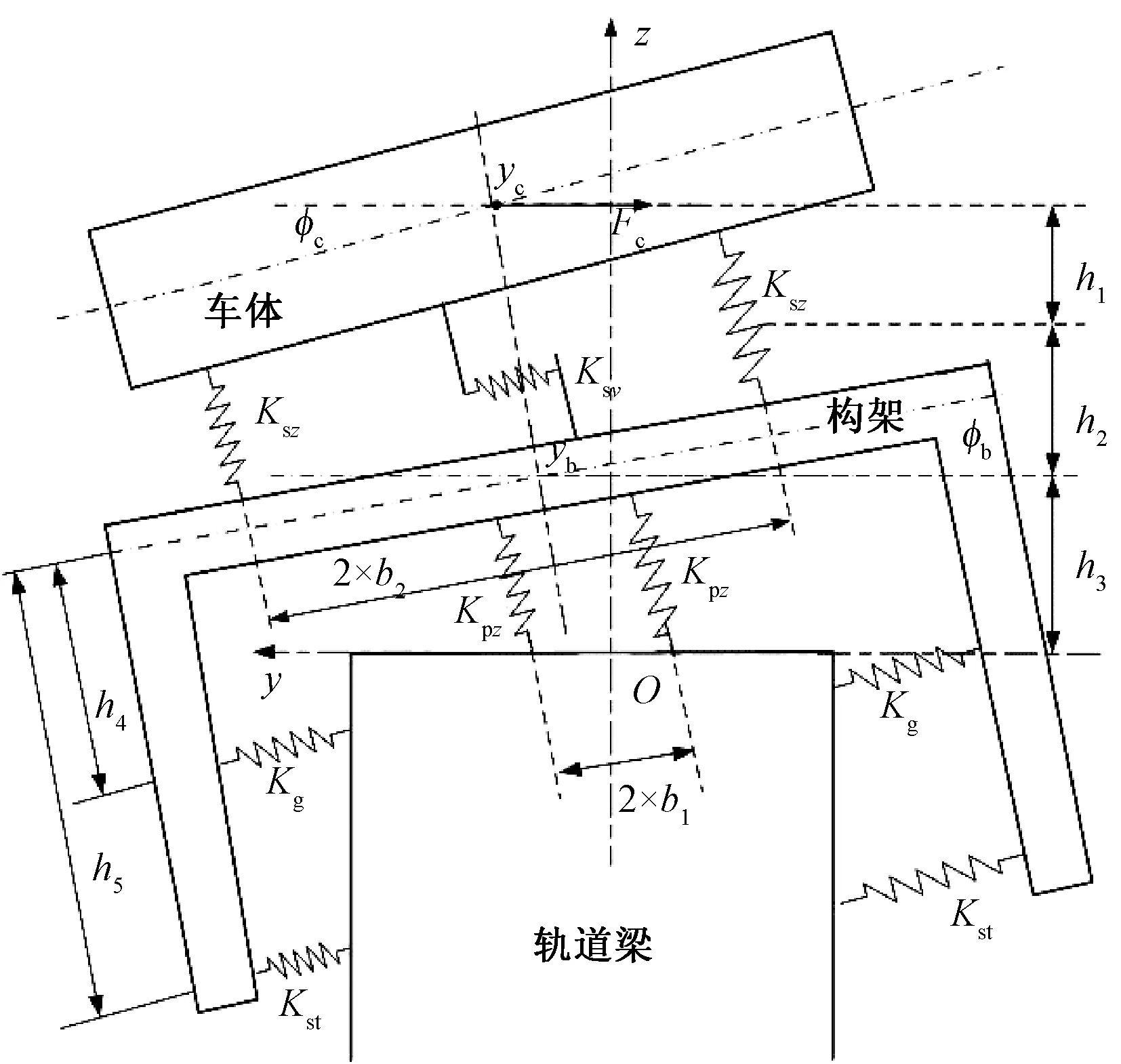
图1 车辆受力分析示意图
车体横移方程
4Ksy(yc-yb)-Fc(1-φb)-G1φb=0
(1)
式中:Ksy为车辆二系悬挂横向刚度;yc为车体横移量;yb为转向架横移量;Fc为惯性力;G1为车体重量;φb为转向架侧滚角。
车体侧滚方程
(2)
式中:Ksz为车辆二系悬挂垂向刚度;b2为二系弹簧中心线横向跨距之半;φc为车体侧滚角;h1为车体重心距二系弹簧的高度;h2为二系弹簧上支撑面距轨面的高度。
构架横移方程
(3)

构架侧滚方程
0.5G1(yc-yb)+2Kszb22(φc-φb)+2Ksy(yc-yb)h2+
2Kg[yb-(h3+h4)φb]h4+2Kst[yb-(h3+h5)φb]h5-
2Kpzb22φb-[0.5(G1+2G2)φb]rd+G2yb-
(4)
式中:Kpz为车辆轮胎垂向刚度;rd为走行轮轮胎半径。
将式(1)~式(4)写成矩阵形式
(5)
式中:
求解矩阵式(5),得到车辆在惯性力Fc作用下的横移量和侧滚角度为
(6)
导向轮和稳定轮离开轨道梁侧表面的位移分别为
(7)
由于h5>h4,所以稳定轮先脱离接触轨道梁侧表面。

表1 车辆模型主要参数及数值
1.2 临界横向力
当车辆行驶在圆周曲线路段时,如果速度大于或小于均衡速度,则车体在离心力的作用下向曲线外侧或内侧倾斜,速度继续增大或者减小,车体倾斜的角度逐渐增大。当作用在车体上的离心力增至使走行部的一个稳定轮刚刚离开轨面时,其上的载荷恰好为零,定义此时作用在车体上的惯性力为临界横向力。临界横向力反映了跨坐式单轨车辆运动状态的变化。当车体上的惯性力小于临界横向力时,走行轮两侧的稳定轮都与轨道梁接触,车辆的抗倾覆能力保持在最大状态,运行安全性得到保证;当车体梁的惯性力大于临界横向力时,走行轮一侧稳定轮与轨道梁脱离,车辆的抗倾覆能力下降一半左右[11]。
设稳定轮预压力为Fpre,临界横向力为Fccr,当一个稳定轮刚刚离开轨面时,式(6)中一个稳定轮的预压力项消失,式(6)变为
(8)
根据式(8),可求得稳定轮刚刚离开轨面时,构架产生横移量和侧滚角分别为
(9)

(10)

设稳定轮的径向刚度为Kst,则稳定轮刚刚脱离轨道梁侧表面时的横移量临界值为
yscr=Fpre/Kst
(11)
式中:Kst为稳定轮径向刚度。
根据式(7),有
Fpre/Kst=h5φbcr-ybcr
(12)
式中:φbcr为构架临界侧滚角;ybcr为构架临界横移量。
将式(9)、式(10)代入式(12),得出
(13)
令
(14)
则
Fccr=n·Fpre
(15)
由式(15)可以看出:临界横向力与稳定轮和导向轮的预压力成简单的线性关系,临界横向力只取决于稳定轮和导向轮的预压力以及车辆自身的参数;随着稳定轮预压力的增加,跨坐式单轨车辆能够承受更大的临界横向力,抗侧倾能力能够更持续地保持在最大状态。代入表1中的车辆参数,得到n=1.986 。
1.3 动力学仿真验证

图3 导向轮和稳定轮径向力仿真结果
根据表1参数,基于多体动力学软件UM建立跨坐式单轨车辆动力学模型,见图2,以此来验证公式的准确性。模型中,将横向力缓慢施加在车体的质心。为尽量减小速度的影响,车辆以1 m/s的低速在直线上运行。

图2 车辆UM动力学模型
设置导向轮和稳定轮初始预压力为5 kN,且在车体质心上分别施加9.7 kN和9.8 kN的横向力,可以仿真得到导向轮和稳定轮的径向力,见图3。从图中可以看出:当车辆承受的横向力为9.7 kN时,轨道外侧的稳定轮和导向轮的径向力数值都是大于零,表示此时的稳定轮和导向轮并没有脱离轨道梁侧表面;当车辆承受的横向力为9.8 kN时,轨道外侧导向轮的径向力,而曲线外侧稳定轮的径向力减小为零,说明这时稳定轮已脱离轨道梁侧表面,而导向轮没有离开轨道梁侧表面,依然处于接触状态。仿真结果说明,当稳定轮和导向轮的预压力设置为5 kN时,临界横向力在9.7~ 9.8 kN之间,与式(15)所得值很接近。
表2为不同稳定轮预压力作用下,临界横向力的仿真值和理论值。对比看出:UM软件仿真值和根据式(15)得到的理论值非常接近,两者的相对误差在4.8%之内。

表2 临界横向力 kN
2 跨坐式单轨车辆的曲线限速
2.1 车体离心加速度与舒适度
国内外铁路大量试验和实践证明,未平衡离心加速度ac影响乘客的生理感受,当ac<0.04g(g为重力加速度)时,乘客不会感受到离心加速度的存在;当ac=0.05g时,乘客可以感受到未平衡离心加速度的存在,但无不舒适的状态;当ac=0.077g时,此时的离心加速度值在大多数乘客的可承受范围之内;当ac=0.1g时,较少乘客能够长时间承受这一未平衡离心加速度的影响。为确保车辆通过曲线路段时乘客的舒适性,国外铁路标准通常要求ac≤0.05g[12]。
2.2 未平衡离心加速度的临界值
跨坐式单轨车辆通过圆曲线路段时时,由于离心加速度的作用而向曲线外侧倾斜,曲线内侧稳定轮的载荷逐渐减小。随着未平衡离心加速度的增大,车体向外倾斜的角度逐渐增大,曲线内侧稳定轮的载荷逐渐减小。当未平衡离心加速度增至某一值时,曲线内侧稳定轮恰好脱离轨面,称这时未平衡离心加速度达到了临界值。
当临界横向力由车辆的未平衡离心力引起时,则有
Fccr=mc·accr
(16)
式中:mc为车体质量;accr为未平衡离心加速度的临界值。
根据式(15)和式(16),则车体未平衡离心加速度临界值与稳定轮预压力的关系为
(17)
应用式(17)计算跨坐式单轨车辆在不同稳定轮预压力下车体未平衡离心加速度临界值,结果见表3。可以看出,预压力越小,则车体未平衡离心加速度的临界值就越小。当稳定轮预压力给定时,如果通过曲线时车辆的速度过高,使得车辆的未平衡离心加速度超过临界值accr,则稳定轮会离开轨面,其载荷变为零,则曲线通过的安全性不能保证[13-14]。因此,当稳定轮预压力确定时,要对车辆的运行速度提出限制,使得车辆未平衡离心加速度小于临界值accr,这样才能保证单轨车辆在通过曲线时所有稳定轮和导向轮都和轨面接触,确保曲线通过的安全性。
从保证行车安全的角度出发,稳定轮预压力越大越好,这样可以保证通过曲线时的未平衡离心加速度有较大的临界值。但是从考虑旅客舒适度的需求出发,没有必要将稳定轮预压力设置的过高,只要使得与稳定轮预压力相关的临界未平衡横向加速度值大于旅客舒适度所需要的值即可。稳定轮预压力设置的过高,不仅增大构架稳定轮支撑梁的初始应力,对构架的结构强度不利,而且增加车辆的运行阻力,增加稳定轮的磨耗。根据式(17),如果要求accr=0.05g,则对应稳定轮的临界预压力值取为5.19 kN。

表3 未平衡离心加速度临界值
2.3 轨道梁超高率的临界值
当车辆停在有超高的轨道梁上时,因重力作用,车辆向线路内侧倾斜,曲线外侧稳定轮的径向载荷减小。随着轨道梁超高率的增大,车辆向内倾斜的角度也逐渐增大,曲线外侧稳定轮的径向载荷逐渐减小。当轨道梁超高率的增至某一值时,曲线外侧的稳定轮恰好脱离轨道梁侧面,称这时轨道梁超高率达到了临界值。
当车体临界横向力由轨道梁超高率引起时,则有
Fccr=mcgδ
(18)
式中:δ为轨道梁超高率。
根据式(15),轨道梁超高率临界值与稳定轮预压力的关系为
(19)
从公式(19)可以看出,当稳定轮预压力确定时,则对应一个轨道梁超高率临界值,当轨道梁超高率的实际设置值小于该临界值,则能够保证车辆停在轨道梁上时所有稳定轮和导向轮都与轨道梁处于接触状态;反之,当轨道梁超高率确定时,可以反推出稳定轮所需要的预压力临界值,大于该临界值,则能够保证车辆停在轨道梁上时所有稳定轮和导向轮都与轨道梁处于接触状态。跨坐式单轨车辆在不同稳定轮预压力下的轨道梁超高率临界值见表4。
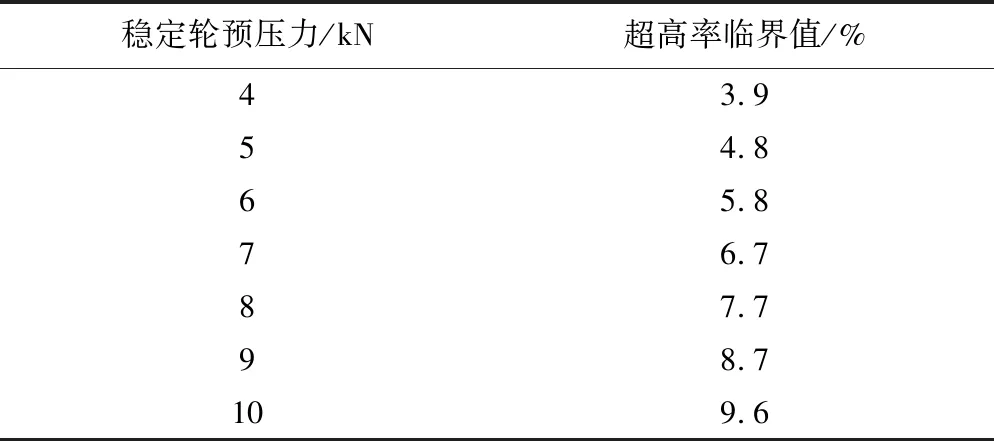
表4 轨道梁超高率临界值
从提高曲线通过速度的角度考虑,需要设置较大的轨道梁超高率,但考虑到运营过程中可能出现曲线上停车的情况,根据车体离心加速度与舒适度的关系,轨道梁超高率不宜设置的过高。如果要求accr=0.05g,则对应轨道梁超高率为5%。
2.4 曲线限速
跨坐式单轨车辆通过坡度大、转弯半径小的曲线线路,与地铁相比,其速度限制较多[15]。当车辆通过曲线时,如果速度大于均衡速度,则车辆向曲线外侧倾斜并产生向外的未平衡加速度;如果通过曲线速度小于均衡速度,则车辆因轨道梁超高向曲线内侧倾斜并产生向内的未平衡加速度;除考虑欠超高和过超高的情况,还要考虑车辆在梁上停车的工况[16]。为了保证旅客舒适性,需要对车辆通过曲线时的速度进行限制,使得未平衡离心加速度小于旅客舒适性要求的数值。同时还需考虑,当车辆通过欠超高曲线路段时,需要对车辆最高运行速度进行限制;当车辆通过过超高曲线路段时,需要对车辆最低运行速度进行限制。
单轨车辆以稳态工况通过圆曲线路段时,可知未平衡离心加速度ac与运行速度V、曲线路段半径R以及轨道超高率δ之间的关系
(20)
将式(17)代入式(20),得到最大和最小限制速度与稳定轮预压力、轨道梁超高率以及曲线半径的关系
(21)
从式(21)可以看出:稳定轮预压力一定时,在相同半径曲线,轨道梁超高率越大,则最高限制速度越大,但是在相同半径曲线,轨道梁超高率越大,则最低限制速度也越大;轨道梁超高率一定时,在相同半径曲线,稳定轮的预压力越大,则最高限制速度越大,而最低限制速度越小。
设置稳定轮和导向轮的初始预压力为7 kN,取不同的轨道梁超高率和曲线半径,由式(21)可计算得到的单轨车辆通过曲线路段时的最高限制速度和最低限制速度,分别见表5和表6。当轨道梁超高率达到9%时,车辆在所有曲线上的最低限制速度都大于零,这意味着当车辆以小于最低限制速度通过曲线路段或在曲线路段上停车时,稳定轮都将脱离轨道梁,这将会影响车辆运行的安全性和稳定性。综合考虑运行安全性和舒适度要求,当稳定轮和导向轮预压力设置为7 kN时,轨道梁最大超高率设置为6%比较合适。

表5 曲线最大通过速度
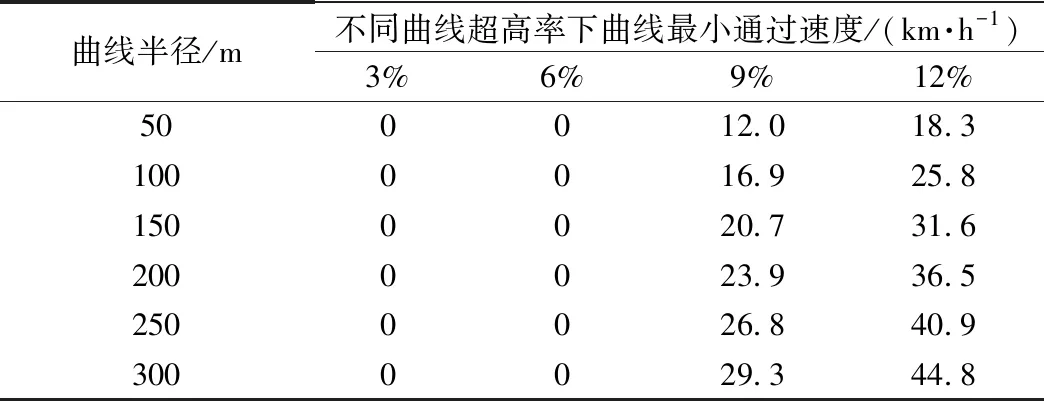
表6 曲线最小通过速率
3 结论
(1)在临界横向力和稳定轮预压力关系的基础上,从车辆乘坐舒适度的角度讨论了稳定轮预压力的合理取值问题。研究表明:从满足旅客舒适度的需求出发,没有必要将稳定轮预压力设置的过高,只要使得与稳定轮预压力相关的临界横向加速度值大于旅客舒适度所需要的值即可。
(2)推导了曲线通过最高限制速度和最低限制速度与稳定轮预压力、轨道梁超高率以及曲线半径之间的关系公式。为了保证通过曲线的旅客舒适性和运行安全性,跨坐式单轨车辆的轨道梁超高率不宜设置得过高,并且应对曲线通过的最高速度和最低速度进行限制。
