四通道可视化系统在汽车工程中的开发及应用
2020-03-17毛婷婷王向阳孙海青袁博
毛婷婷 王向阳 孙海青 袁博
(泛亚汽车技术中心有限公司)

在汽车前期开发过程中,大部分的数字设计往往都没有较好的验证和评估工具,传统的做法仍然只是基于3D 建模软件中各组测量数据的对比,各项分值计算,以及通过对已上市车型的参考比对,从而综合得出一个较优方案,虽然在各个大节点时也会加工实物模型来验证,但验证的内容非常有限,再加上验证模型制造误差等,使得在实物评估时常常比较被动,同时实物模型的加工时间较长,加工费用也较高,车型及零件更新方案迭代效果和效率都有限,使得很多设计及工程问题很难在早期被发现,而且有些更改需耗费巨大的人力物力。因此,在早期的方案验证上,亟需寻求能快速并直观展现设计和结构方案的工具和方法,验证多种可能的车型方案,为所有测量及对比数据提供直观可靠的数字化模型和场景进行验证,以便及早地发现设计和开发过程中的问题。文章就四通道虚拟现实可视化评估系统(CAVE 系统)进行了深入研究和设计,最终实现了整车1∶1 虚拟评估场景和环境的搭建,为汽车前期开发提供快速高效的可视化评估工具[1]。
1 四通道高清虚拟可视化系统原理及技术方案
1.1 四通道CAVE系统定义
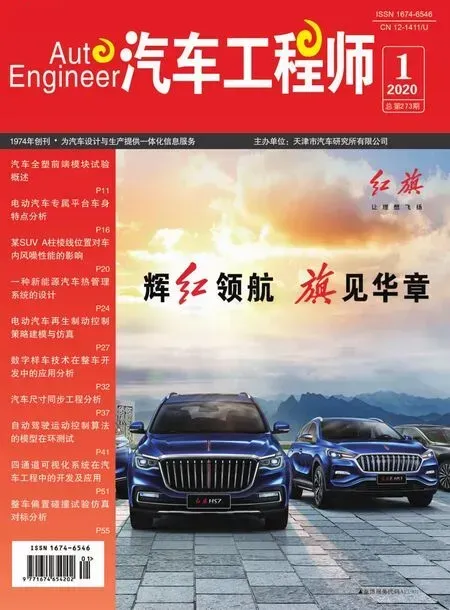
CAVE 系统是一种基于多通道视景同步技术和立体显示技术的房间式投影可视协同环境,该系统可提供1 个房间大小的最少3 面或最多70 面的立方体投影显示空间,供多人参与,所有参与者均完全沉浸在一个被立体投影画面包围的高级虚拟仿真环境中。文章的四通道CAVE 系统则是基于4 面直角的立方体投影显示空间[2],如图1 所示。从图1 可以看出,通过左、中、右、地4 块大屏幕包围成密闭的步入式可视化投影空间。

图1 四通道CAVE 系统空间效果图
再借助相应虚拟现实交互设备(位置跟踪器、交互手柄等),从而获得一种身临其境的高分辨率三维立体视觉影像和6 个自由度的交互感受。由于投影面积能够覆盖用户的所有视野, 所以CAVE 系统能提供给使用者一种完全真实的视角,从而带来前所未有的身临其境的沉浸感受。
1.2 四通道CAVE系统拓扑原理
文章中的四通道CAVE 系统,主要设计并搭建了一整套软硬件系统,系统包含的软硬件系统模块,如图2 所示。其中硬件部分包括:一拖四集群工作站图像生成系统、4K 高清双画面立体投影系统、精确光学位置追踪系统、图像显示系统、数据流转与通信系统、多模式多工况中央控制系统等。软件部分包括:基于虚幻(UNREAL)引擎定制开发的软件及部署,利用C++底层技术开发实现四屏立体同步、眼点定位跟踪功能,以及评估应用功能开发和操作界面(UI)设计等。
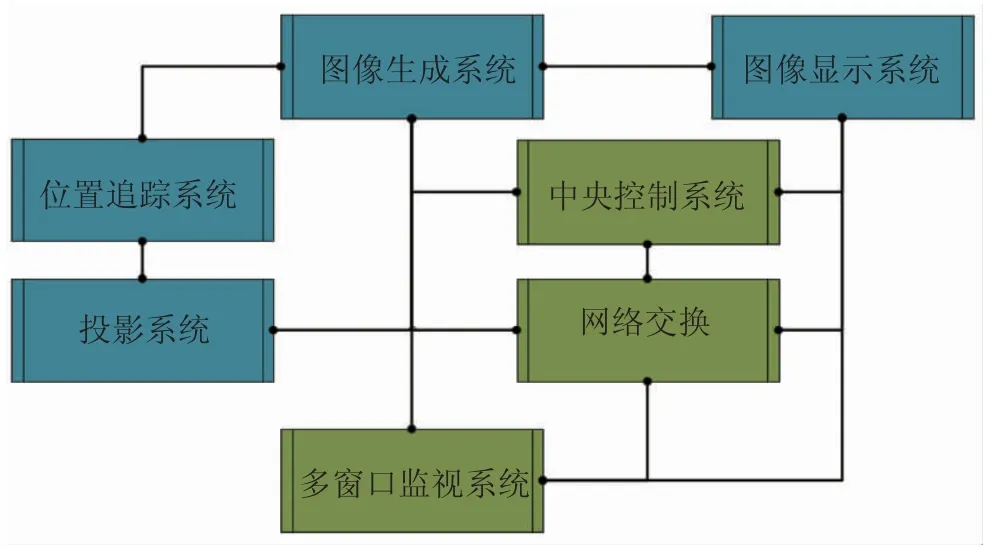
图2 四通道CAVE 系统主要模块关系图
CAVE 系统的功能设计包括9 个方面:
1)图像生成系统:设计利用5 台Z840 工作站,通过其中1 台主控机实现一拖四集群图像生成,配备高性能计算显卡,实现单通道4K 高清图像生成。
2)投影系统:设计利用4 台4K 高清投影机,单机2 组灯泡,1 组配备3 个高亮度灯泡,单通道亮度达到30 000 lm,其中左中右3 台背投,地面正投方式,利用反射镜缩短投影距离,提高投影机房空间利用率,通过双屏3D 图像设置,实现双画面立体显示。
3)位置追踪系统:设计利用6 个光学追踪探头,立体眼镜上固定追踪定位球,实时抓取定位球位置信息,将抓取到的位置信息传送至图像生成场景和投影系统中,实现实时位置更新,确保抓取位置点的展示内容准确无变形。
4)图像显示系统:除了CAVE 主屏投影显示以外,控制台处的图像利用KVM 控制器进行显示和控制切换,简化控制台处的显示设备,设立3 台显示器,分别针对CAVE 的多台工作站进行显示切换。
5)多窗口监视系统:通过截取应用软件视频流的方式进行视频传送,从而监控整个CAVE 房间内的各种应用。
6)基于UNREAL 的定制化开发软件部署,重新编译UNREAL 官方应用软件后部署在主控节点及4 台渲染节点上,并设计UI 界面实现人员操作简易化,开发相应评估操作工具,如天气变化、时间变化下的光照变化,测量、剖切、移动旋转、车辆切换、座位切换等。
7)立体同步:本系统使用主动立体系统获得立体画面。主动立体系统中,投影机高速切换投影左右眼的图像,并通过无线/红外信号控制立体眼镜左右镜片的开关动作。本系统中投影机无需从渲染服务器处获得左右眼的同步信号,左右眼的同步由投影机按照视频信号直接发生,由于各个渲染节点是通过像素同步的方式实现,保证了视频信号的频率与相位同步。
8)多画面数据同步:在CAVE 环境中,需要让用户将多个屏幕的画面认知为一个整体,需要时刻准确地获得用户双眼的位置。本系统使用光学追踪系统追踪用户视点,位置追踪光学探头通过红外三角定位的方式测量安装在立体眼镜上的反光球,并推算出双眼位置。使得对应屏幕上的图像与人眼在虚拟场景中相同位置上看到的画面等效,从而获得沉浸式的体验。
9)应用功能开发结合UI 界面:除了以上应用系统的搭建外,在使用过程中的人机UI 界面开发和工具菜单开发,实现人员在虚拟环境中进行相关的评估操作,如切换车辆、切换场景、更换天气、座椅定位、移动旋转部件和车辆、剖切断面、测量、视域显示、照明等功能,以及各场景事件如人员走动、车辆流动等,从而还原更真实的路面情景,进行车辆视野、人机、设计质量检查、干涉检查、装配检查等。
1.3 四通道CAVE系统技术要点
四通道CAVE 高清可视化系统整体框架,如图3所示。通过主控机拖4 台渲染节点实现集群图像渲染和计算,并通过输出为二分画面与投影仪相连接,每个画面由2 个数据通道组成,系统中将4 个通道组成横向分辨率为7 680×2 160 像素(Pixel)的Mosaic 模式,输出左右双画面高清图像,将投影画面设计成双通道左右眼立体模式,实现左右眼切换下的立体显示,配置立体同步文件[3],实现四通道画面同步无延迟,同时为保证视点的准确性,利用6 个位置追踪摄像头实现光学捕捉,主要捕捉人在虚拟环境进行无线交互的Flystick 手柄位置,以及立体眼镜位置和座椅相对位置等,从而实现人与虚拟环境中位置的高度匹配,保证视点和手柄的位置准确不失真。

图3 四通道CAVE 系统整体框架图
文章的四通道高清可视化系统的网络传输采用交换机网络传输方式,建立整个系统的局域网络,实现CAVE 主控机与4 台渲染节点的数据交换与连接,实现各软硬件之间的协同与同步,以及实时的通信协议。
四通道高清可视化硬件系统需匹配相关软件并进行部署,软件部署主要有以下内容:主控机上部署同步服务(SyncServer)配置,CAVE 一键启动控件、位置定位管理控件、系统配置相关软件及控件,渲染节点上部署有基于UNREAL 定制开发的主程序以及监控程序。
CAVE 多画面立体同步控制,如图4 所示。通过位置追踪主控程序控制并管理4 台渲染节点,实现位置和立体同步,利用主控机分发对应的场景和车辆数据文件到各台渲染节点,利用主控机上的启动器控件,实现对4 台渲染节点的一键启动,并在保证画面立体同步的同时,也保证ART 捕捉到的视点位置准确。

图4 CAVE 多画面立体同步控制图
以上功能主要实现了软件数据与硬件的连接和展示,而在评审数据的准备过程中,在数据处理上,基于UNREAL 引擎定制开发的编辑打包软件(UE)及UI 界面开发也是很重要的,在定制UE 中,对相应车辆数据进行处理,包括材质渲染、灯光、反射、零件替换,座椅定位前期数据处理工作完成后,最终打包成UE 工程文件,并按照用户配置发布到服务器中,通过CAVE 主控端的CAVE 启动器控件,开启四通道高清可视化系统的车辆文件。图5 示出CAVE 评审数据打包显示界面。

图5 CAVE 评审数据打包显示界面
部署完以上车辆数据后,就可以在CAVE 系统中进行评估,利用定制开发的UI 工具进行车型数据的评估,并可选择预置在场景中的各项辅助评估内容,包括选择不同的场景、天气和时间,以及跳转不同的定位座椅、车外视角等,从而在各种工况条件下进行评估,并利用UI 工具,对评审车辆进行剖切、测量、旋转移动、视域检查、手电筒照亮目标区域、储物等,满足多工况下的多重应用评估。图6 示出CAVE 系统UI 功能显示界面。

图6 CAVE 系统UI 功能显示界面
2 CAVE系统在汽车工程开发中的应用优势
2.1 主视角四屏全高清汽车工程模型展示
在以往的多屏可视化系统中,虽然能实现立体同步及立体展示,但由于平面投影给出的立体图像针对立体眼镜来说,只有某一些固定位置的立体图像才是准确不变形的,一旦移动位置,即便带上立体眼镜,所观测到的图像信息仍然会变形,从而无法达到准确评估的目的。图7 示出CAVE 系统立体图像与主视角定位。

图7 CAVE 系统立体图像与主视角定位展示界面
文章的CAVE 系统通过光学追踪的位置定位,实现了主视角图像准确无变形,屏幕上方的6 个光学追踪定位器,实时追踪加在立体眼镜上的定位球位置,并将此位置实时传送至虚拟场景中,从而实现实际场景与虚拟场景的高度匹配,带上主视角立体眼镜后,随时走动位置,人眼所观测到的立体图像会根据人体位置实时变化,因此,在光学追踪下的立体评估准确地实现了对汽车数据模型评估的功能。图8 示出CAVE 系统主视角追踪。当人钻入车底时,即可实时看到底盘相关零件并评估其布置状态。

图8 CAVE 系统主视角追踪图
2.2 虚拟空间内三维空间手柄功能应用
在CAVE 中使用Flystick 手柄进行操作,设计Flystick 手柄产生1 根虚拟射线,当射线被使用时,功能与鼠标类似,可实现在三维虚拟空间中的人机交互工作,同时藏在Flystick 手柄透明玻璃下的定位器同样可被光学追踪探头识别,并实时将手柄的射线位置与虚拟场景进行匹配,从而使得手柄可在各屏幕的场景中自由操作,实现三维虚拟空间中的人机交互及界面UI 选择等,从而脱离了键盘鼠标操作的不及时性。图9 示出CAVE 系统三维空间交互手柄。

图9 CAVE 系统三维空间交互手柄示意图
通过主视角眼镜佩戴,以及手柄在三维空间中的操作,将车辆模型处理好以后,就可以进行车辆状态评估,在汽车前期研发阶段,为汽车总布置和零件设计提供了一种快速真实地反映设计效果和意图的虚拟模型,为评估者提供直观可靠的展示方案,可帮助工程师们快速决策出更优方案。图10 示出CAVE 系统评审模式及功能选择设计。

图10 CAVE 系统评审模式及功能选择设计显示界面
2.3 同场景下的多人协同评审
在评审过程中,主视角的方式可以给评估人员带来快速全新的身临其境的评估体验,但往往1 个主视角眼镜及位置对车辆评估来说是不够的,因此在同一场景中,经常需要至少2 人参与评估,文章设计了CAVE 与虚拟现实(VR)头盔结合的方式进行多人协同互动,如图11 所示。通过设计CAVE 与VR 计算机的网络设置,以及统一的UNREAL 引擎平台二次开发,实现同场景2 人互动,同时可以将CAVE 视角和VR 视角通过视频流的方式投影在第三方屏幕上,其他人可在第三方屏幕上了解2 人的互动内容。

图11 VR 与CAVE 中的2 人协同评审场景示意图
3 结论
文章通过对虚拟可视化系统的特点、实现原理及技术方案进行深入分析和研究后,针对汽车前期开发业务特点,搭建了定制化四通道高清虚拟可视化系统,实现了对整车的1∶1 可视化评估。评估人员可以坐在三维虚拟场景和车里,对前期的零件布置方案进行对比分析、视野校核、人机工程分析,通过对外观质量等一系列评估项进行真实有效的评估,可提早发现前期的很多设计和零件布置问题,降低前期开发验证中对实物模型的依赖,避免了因为前期设计问题给后期带来的较多返工和客户抱怨等。