中国民航机坪特种设备智能停止系统研究与设计
2020-03-16宁立文黄文礼彭翔宇章文婷狄成福胡放荣
宁立文 黄文礼 彭翔宇 章文婷 狄成福 胡放荣
摘 要:本文以中国民航特种设备之一的管线加油车为例,设计一种适合于所有民航机坪特种设备的智能停止系统。该系统由PLC控制器、测距模块、显示与报警模块、光学检测模块和气动控制模块组成,在与原车联锁气控刹车系统兼容的情况下,而且实现了防撞自动刹车、误差检测和系统报错功能,大大减少了中国民航管线加油车刮碰飞机事故。
关键词:智能停止系统 防撞自动刹车 测距模块 PLC控制器 气动控制
中图分类号:V249 文献标识码:A 文章编号:1674-098X(2020)11(c)-0004-05
Research and Design of Intelligent Stop System for Special Equipment of CAAC Apron
NING Liwen1 HUANG Wenli2 PENG Xiangyu1 ZHANG Wenting1 DI Chengfu1 HU Fangrong2*
(1.South China Bluesky Aviation Fuel Co., Limited, Nanning Branch, Nanning, Guangxi Zhuang Autonomous Regiom, 530048, China;2.College of Electronic Engineering and Automation, Guilin University of Electronic Technology, Guilin, Guangxi Zhuang Autonomous Regiom, 541004 China)
Abstract: In this paper, an intelligent stop system for special equipment of Civil Aviation Apron is designed, taking the pipeline refueling vehicle as an example. The system is composed of PLC controller, distance measuring module, display and alarm module, optical detection module and pneumatic control module. Compatible with the original interlock pneumatic brake system, the function of automatic anti-collision braking, error detection and system error reporting is realized, which greatly reduces the accident of the aircraft scraped by the refueling vehicle of the civil aviation pipeline of China.
Key Words: Intelligent stop system; Automatic anti-collision brake; Ranging module; PLC controller; Pneumatic control
目前,全国各机场民用飞机供油大部分采用罐式加油车和管线加油车,其中以管线加油车在国内大部分机场广泛使用,可为波音B737、空客A319等系列机型进行加油作业。近几年频繁发生加油车加油过程中刮碰飞机的事故,对机场安全生产造成重要影响。因此,研发机坪特种设备智能停止系统,对保障机场安全生产具有重要意义。
1 研究现状
防撞控制功能一般采用激光雷达防撞系统,因为它的结构简单、测量范围广,但是易受外界环境干扰并且报错率较高。毫米波雷达作为一种不易受环境条件影响、并且测量稳定的技术被引入防撞系统。前几年,德国奔驰公司利用毫米波雷达设计的“速度-距离控制系统”,可以自动执行刹车和速度控制[1];瑞典Celsius Tech电子公司研制的自适应智能驾驶控制系统,可用于高速公路上控制车辆间距离和速度[2],达到防撞目的。近年来,我国科研人员设计出一种60GHz和77GHz的远程汽车雷达防撞系统,能实现自动刹车功能[3],虽然不易受外界环境影响且报错率低,但是成本较高,难以推广应用。在刹车控制方面,大多采用单片机或FPGA作为控制器来执行刹车指令[4-5],但是存在操作性能不稳定问题。为了解决长期以来检测距离数据不准确、存在测量盲区等问题,本文采用PLC作为主控制器,实现中国民航管线加油车的防撞自动刹车功能。
2 设计原理
2.1 系统整体设计
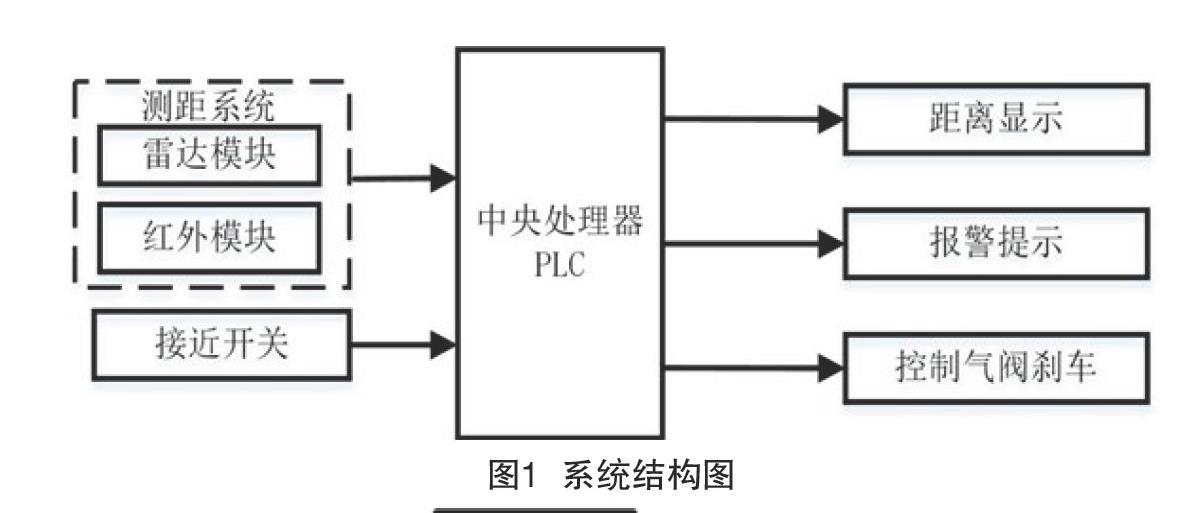
本防撞自动刹车功能由PLC控制模块、雷达模块、红外传感模块、气控模块和显示报警模块组成[6],采用雷达和红外探头进行双重测距,提高测量精度。雷达模块用于加油车与前方障碍物间的距离测量,在显示屏上显示并触发相应的语音报警提醒。根据航空公司行业规定,当加油车进出机位时,需要以不大于5km/h的速度行进,此时加油车挂一檔,接近开关打开,启动防撞自动刹车功能。当加油车与前方障碍物的距离达到设定距离时,接近开关传递信号到PLC控制器,再驱动控制气阀进行紧急制动刹车[7],系统结构如图1所示。
2.2 雷达模块
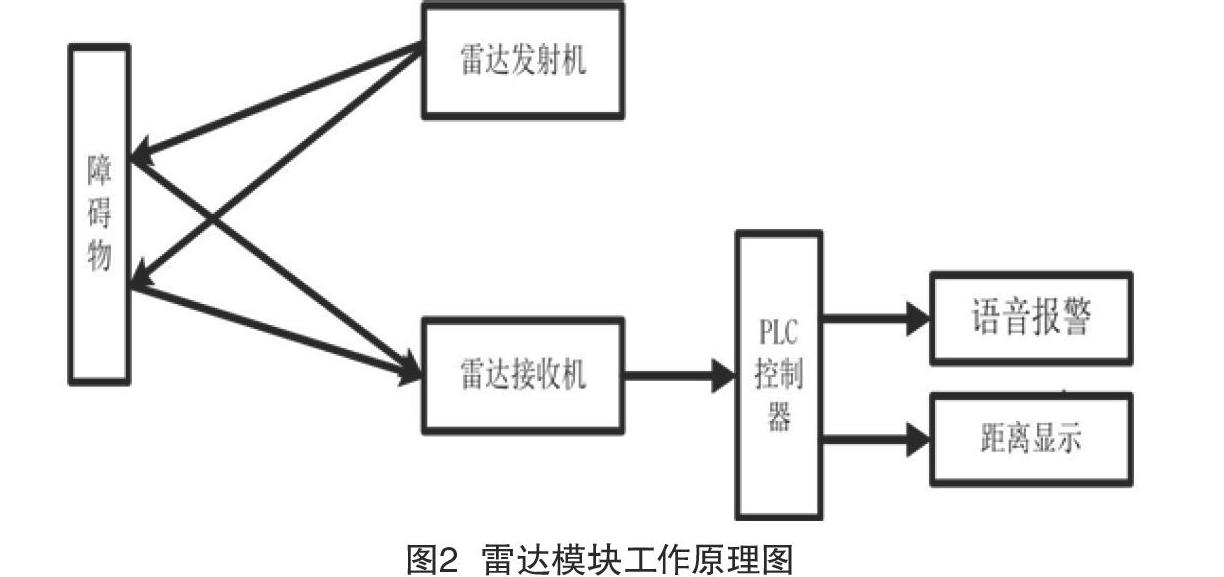
在加油车的外部不同位置安装四个性能稳定、不受障碍物形状和颜色影响的雷达探头,每一个雷达模块主要由发射机、接收机、天线和显示器四个部分组成。
雷达发射机发出的电磁波到达障碍物后被反射,反射信号到达雷达接收机[8-9],经接收机放大后传送给PLC控制器,再通过显示器显示加油车与前方障碍物的距离,当接近设定距离时,会触发语音报警模 块[10]。发射机发出的电磁波,经过障碍物反射到达接收机所需时间T可以根据公式S=CT/2计算,其中S为加油车与障碍物间的距离,C为光速[11-12]。雷达模块工作原理如图2所示,实物如图3所示。
2.3 红外传感模块
采用红外传感器EQ-34进行障碍物测距,LED为红外发射器,两段光电二极管作为接收器,若红外光入射角为θ,发射器和接收器的中心距离为L,通过三角测距原理可以测出加油车距离障碍物的距离D。测量过程中,光电元件将光信号转换成电信号[13-14],反馈给PLC控制器和气控系统,实现紧急刹车。红外传感模块工作原理[15]如图4所示。
2.4 气控系统
防撞自动刹车功能的核心部分——气控系统的工作原理如图5所示,当加油车距离障碍物小于安全距离0.8m时,气控系统会收到红外信号,并依次经过气路3、两位三通电磁阀G、气路4、梭阀F、气路6和刹车气缸H,执行防撞自动刹车功能。此效果制动行程为快排气急刹车,能第一时间将加油车自动刹停,避免刮碰飞机和机具。此时联锁刹车系统控制进入刹车泵的气源,实现慢排气缓刹车功能。因此,两套刹车系统均独立工作,且能够到达预期效果,控制模块实物如图6所示。
2.5 主控程序设计
主控制系统采用的是PLC控制器,程序设计流程如图7所示。
3 技术难点
3.1 与原车联锁气控刹车系统的兼容问题
在管线加油车联锁系统,当任何一个联锁功能启动,电控阀将气路开启,进入刹车泵,在到达节流阀和两位五通阀排气。这种制动行程为慢排气缓刹车,主要是为了避免行车中联锁功能突然开启,造成急刹车带来的追尾风险。
3.2 系统稳定性
管线加油车在飞机机翼下加油作业时,保障作业人员与机具会多次靠近加油车,且距离小于设定的最低安全值。因此,感应设备会不断接收信号,造成不间断地自动刹车。这样反复多次地无效触发,会导致电瓶亏电、刹车泵疲劳磨损等安全隐患。因此,考虑利用原车行车档位,当挂一档行驶时防撞自动刹车功能开启,能有效地排除上述隐患。并且在满足行业规定(进出机位时速不大于5km/h)的条件下,有效地排除了加油机刮碰飞机或机具的风险。
3.3 降低误报率
当防撞自动刹车功能被报警触发后,车辆自动刹车,作业人员不能随意复位,通过自主编程触发,PLC控制器会形成自锁,需作业人员检查确认车辆周边无障碍物后,需手动复位才能解除误报,并将刹车功能复位。另外,通过控制电路加装了系统超越装置,当有故障时可随时超越切换,不影响正常行驶。
4 工况测试
当管线加油车挂一档行驶时,接近开关打开,启动语音播报和防撞检测功能。当障碍物距离小于设定值1.5m时,距离显示屏实时显示距离数值。当距离小于设定最低安全值0.8m时,车辆自动刹车至停止。当车辆处于自动刹车状态时,作业人员将障碍物移除,并手动退出一档,即可自动解除刹车,恢复正常行驶状态。
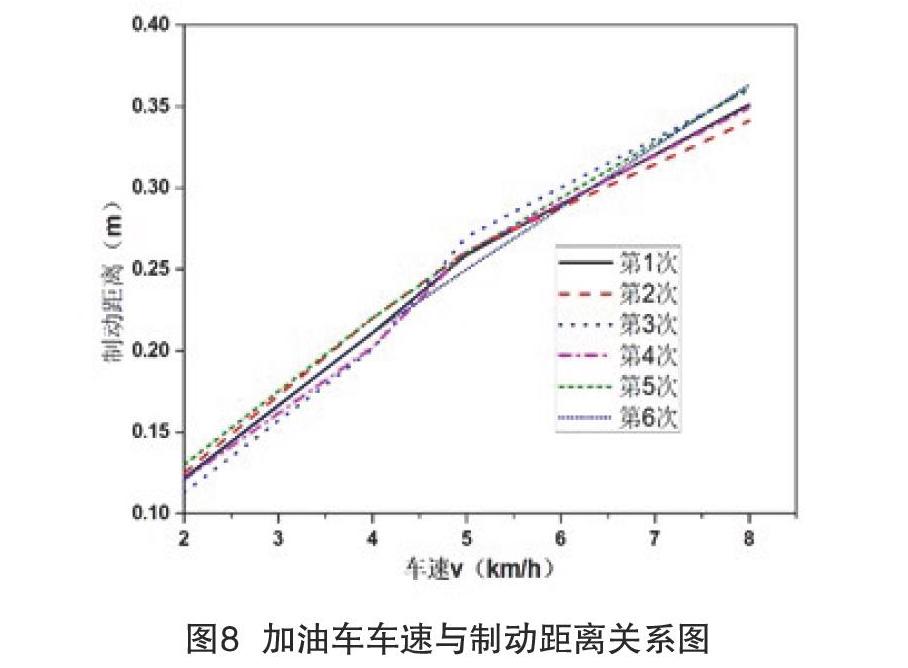
由于加油车不同的前进速度具有不同的惯性和不同的刹车时间,导致加油车制动距离不同。因此,以加油车的制动距离来衡量防撞自动刹车功能的稳定性。由于本系统是在加油车进站过程中行进车速低于5km/h的行业标准下设计的,所以分别选取了加油车挂一档状态,且时速为2km/h、4km/h、5km/h和8km/h的刹停距离进行测试,结果如表1所示。
由表1计算出的刹停距离平均值、标准偏差和变异系数如表2所示。
由表1和表2可知,时速为2km/h、4km/h、5km/h和8km/h这几组数据的标准差偏差都在0.005~0.009范围内,变异系数都在0.02~0.05之间,说明偏差极小。由表1数据得到的制动距离与加油车车速间的关系如图8所示。
由图8可知,多次测试车速与制动距离的变化情況大体一致,表明该防撞自动刹车功能很稳定、误差极小。
5 结语
本文对中国民航机坪特种设备的智能停止系统进行研究,设计了一种基于PLC控制器的民航特种设备之一的管线加油车防撞自动刹车功能,不仅符合行业标准,而且与原车控制系统兼容性好。该功能采用雷达模块和红外光电模块进行双重测距,增加了测量精度。这种防撞自动刹车功能在机场飞机加油车上首次应用,安装简单,费用低,且不受地域限制,不仅能适用于管线加油车,还能用于民航领域其它特种车辆的防撞。
参考文献
[1] 杨闯.基于信息融合的汽车自主防撞控制系统设计与研究[D].青岛:青岛科技大学,2017.
[2] 崔宾.基于毫米波雷达的汽车防撞系统研究[D].成都:西南交通大学,2011.
[3] 冯力方.汽车防撞雷达信号处理研究及系统设计[D].成都:电子科技大学,2016.
[4] 杨维娜.基于单片机的汽车自动刹车系统设计[J].企业导报,2015,301(21):54,59.
[5] 刘明华.基于FPGA的自动刹车系统的研究与设计[J].科技传播,2014(6):81-82,65.
[6] 奠石镁.超声波测距在汽车倒车防撞系统中的应用[J].电脑知识与技术(学术交流),2007(4):1083-1085.
[7] 帅盼,张海宁,白福,等.基于超声波测距的汽车倒车避障系统设计[J].国外电子测量技术,2016(10):54-57.
[8] 王建宇.基于物联网的汽车智能测距系统的设计与实现[J].现代电子技术,2015,38(22):94-98.
[9] 张乐,秦石乔,王省书,等.用于智能汽车的小型LD激光测距仪[J].激光技术,2005,29(2):130-131,168.
[10] 王虎,杨启正,李约朋.基于超声波测距的汽车倒车防撞报警系统设计[J].时代汽车,2019(21):44-45.
[11] 吴迅.基于单片机的汽车自动刹车系统设计[J].电子 测试,2009(10):53-56.
[12] 谢兴盛,方勇文,吴云峰,等.汽车自适应驰控装置中的红外激光测距[J].激光技术,2004,28(5):521-523,530.
[13] 王丽博,王庆平.基于红外测距传感器的倒车雷达电路板设计[J].农机使用与维修,2019(10):20-21.
[14] 蒋晓玲,孟志强,陈燕东,等.汽车追尾防撞红外测距系统[J].光电子技术,2011,31(1):67-72.
[15] 张召亮,张帆,马智远,等.激光测距在汽车智能防撞系统中的应用[J].中国水运:学术版,2007(7):55-56.
