Hidden Attractors in a Delayed Memristive Differential System with Fractional Order and Chaos Synchronization
2020-03-16DaweiDingYecuiWengandNianWang
Dawei Ding, Yecui Weng and Nian Wang*
(1.School of Electronics and Information Engineering, Anhui University, Hefei 230601, China;2. Key Laboratory of Intelligent Computing and Signal Processing, Ministry of Education, Anhui University, Hefei 230601, China)
Abstract: As an important research branch, memristor has attracted a range of scholars to study the property of memristive chaotic systems. Additionally, time-delayed systems are considered a significant and newly-developing field in modern research. By combining memristor and time-delay, a delayed memristive differential system with fractional order is proposed in this paper, which can generate hidden attractors. First, we discussed the dynamics of the proposed system where the parameter was set as the bifurcation parameter, and showed that with the increase of the parameter, the system generated rich chaotic phenomena such as bifurcation, chaos, and hypherchaos. Then we derived adequate and appropriate stability criteria to guarantee the system to achieve synchronization. Lastly, examples were provided to analyze and confirm the influence of parameter a, fractional order q, and time delay τ on chaos synchronization.The simulation results confirm that the chaotic synchronization is affected by a,q and τ .
Keywords: fractional order; memristive; time-delay; hidden attractors; chaos synchronization
1 Introduction
Memristor, a type of two-terminal nonlinear circuital element, was put forward by Professor Chua in 1971[1]. As a contemporary hot topic, the study of the nature of memristor has drawn wide attention from researchers. Compared with general differential systems, memristive differential systems with properties of memory, non-volatility, and nonlinearity may exhibit more complicated chaotic behaviors, which has potential application prospects. The current methods of building memristive circuit systems are no more than introducing the memristor in the existing circuit or replacing the nonlinear resistance element in the original circuit with memristor[2-5].For instance, Ruan et al.[2]introduced the simplified Lorenz system that uses memristor as a positive feedback and studied its dynamics. In Ref. [3] and Ref. [4], memristor was substituted for the resistor in the existing circuitry system to construct a new hyperchaotic memristive system with multi-winged attractors. On the contrary, many other scholars focused on the applications of memristor such as secure communications[6], artificial neural networks[7], and non-volatile random access memory[8].
Fractional calculus has been highly favored in the study of chaos theory[9-10]because it makes dynamic systems show more complex chaotic phenomena. As an exceptional case of system that is not linear, fractional-order chaotic systems have more complex dynamics than general nonlinear systems. It was a big hit when Hartley et al.[11]first raised the Chua’s system with fractional order in 1995. Then, in Ref. [12] a simple memristive chaos system with fractional order was studied, which is the extension of the integer order chaotic system. To sum up, the current research on fractional order is mostly based on the expansion of the corresponding system into its fractional order form[13-15].
Time-delay (time interval) refers to the period from the initiation of a certain behavior to the results, which is frequently cited in the differential equations. Such delay differential dynamical systems are commonly used and studied in the fields of biological systems[16], economy[17], neural networks[18], chaos[19], physics[20], etc. Delay seems to be very small, but sometimes it has a certain potential impact on the system’s oscillation and may affect the dynamics of the entire system. Therefore, it is necessary to investigate time-delay in complex dynamic systems theoretically and practically.
Chaotic synchronization has always been a significant contemporary topic in the study of non-linear science. At present, there are various methods to realize synchronization of chaotic system schemes, such as Laplace transform theory[21], adaptive feedback control method[22], a sinusoidal state coupling control method[23], active control method[24], and sliding model control method[25-27]. Some other methods were reported in Refs. [28-30]. In this paper, we derive sufficient criteria and design a linear feedback controller for system synchronization.
Motivated by what has been discussed, our research object is a fractional-order delayed memristive system without equilibrium. The main contributions are summarized as follows:
1) Taking the parameteraas bifurcation parameter, the evolution law of the proposed system with the change of parameterawas observed. It was found that this system exhibited more complicated chaotic behaviors than the integer order counterpart[31];
2) A simple active control method was designed to cope with chaos synchronization. Then the stability of the error system was discussed to obtain the conditions for system synchronization;
3) The effects of three factors (i.e., parametera, fractional orderq, and time delayτ) on synchronization were discussed by providing examples and the results were analyzed.
The rest of this paper is arranged as follows. Section 2 gives the related definitions regarding to fractional calculus and proposes a delayed memristive chaotic differential system. Section 3 presents the evolution process with the variation of the coefficient parametera. Section 4 introduces the process of chaos synchronization of the system and provides the stability conditions for the error system. The effects of these factors on the system synchronization are discussed in Section 5 and Section 6 summarizes the obtained findings.
2 Preliminaries
2.1 Definitions
Definition1: Given thatf(t) is a continuous function, the Caputo derivative adopting fractional orderqis defined as
(1)

(2)
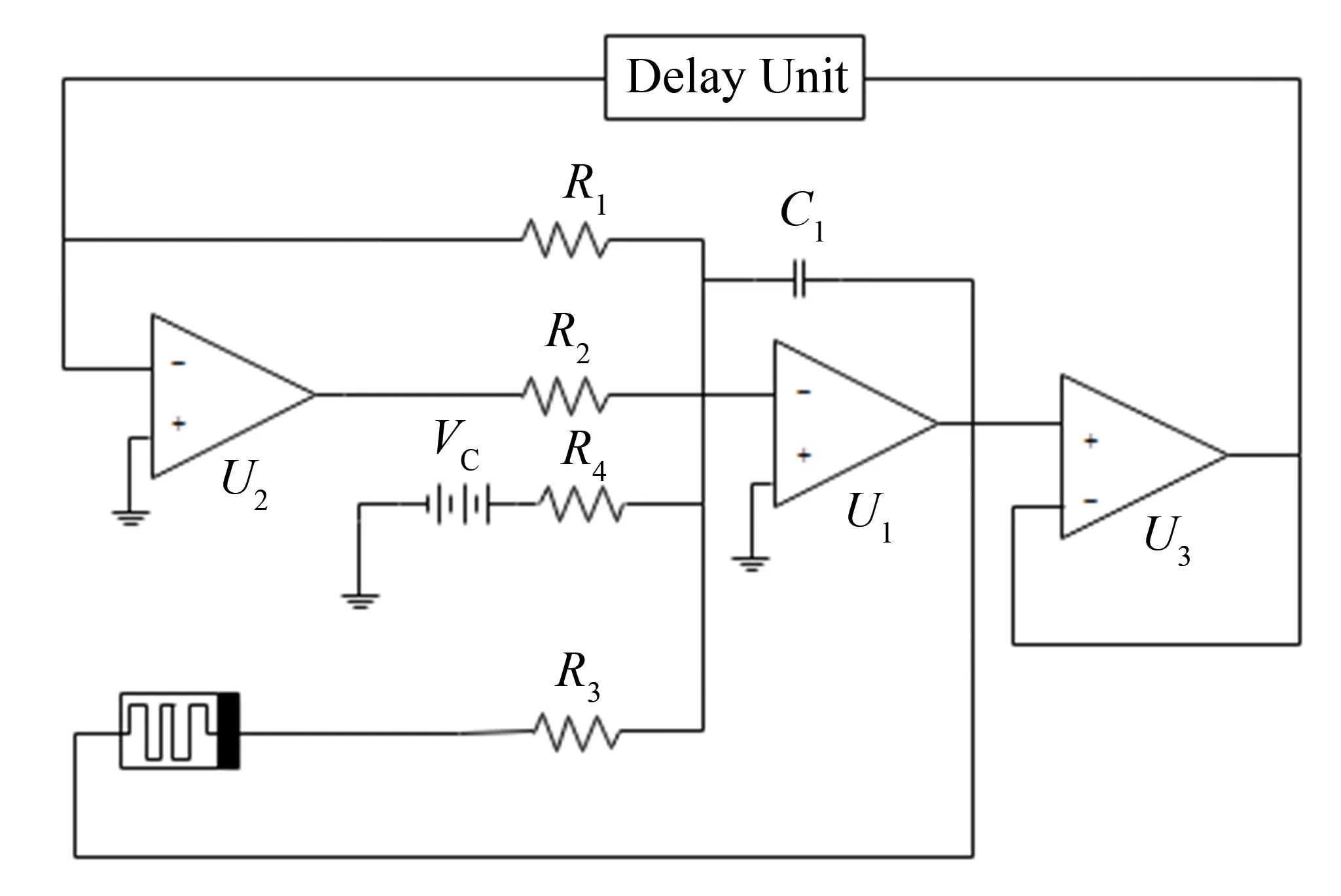
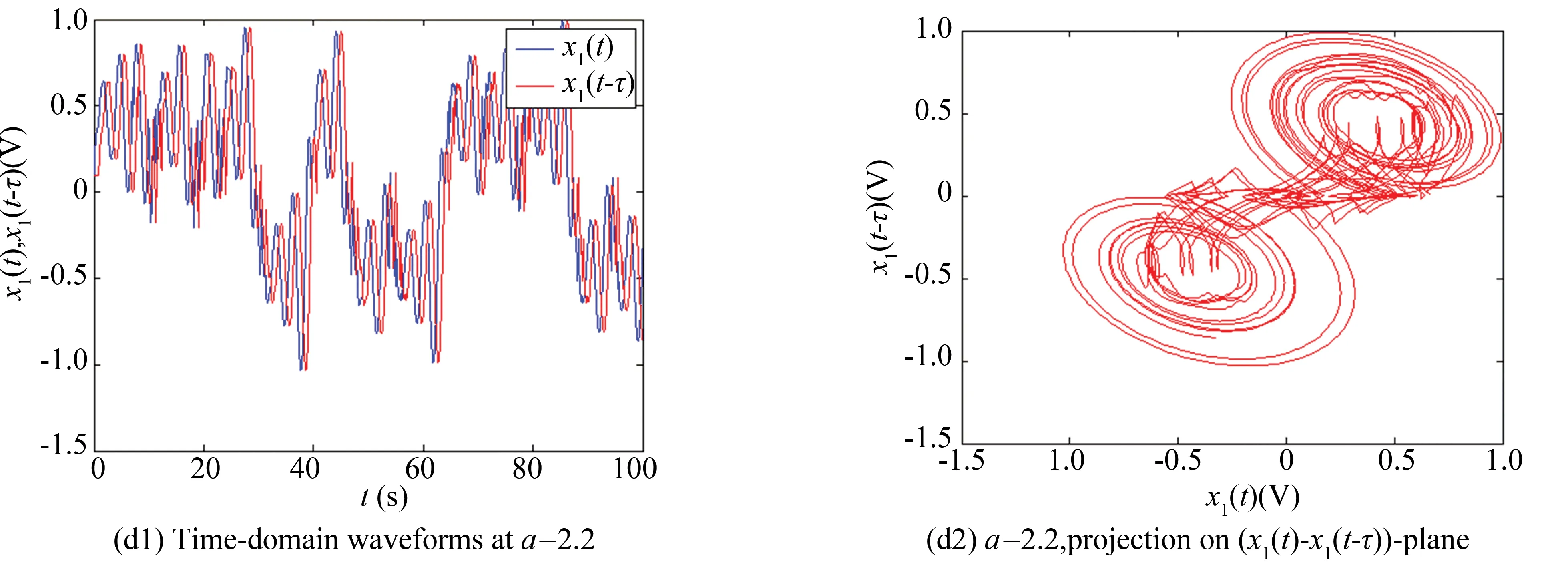
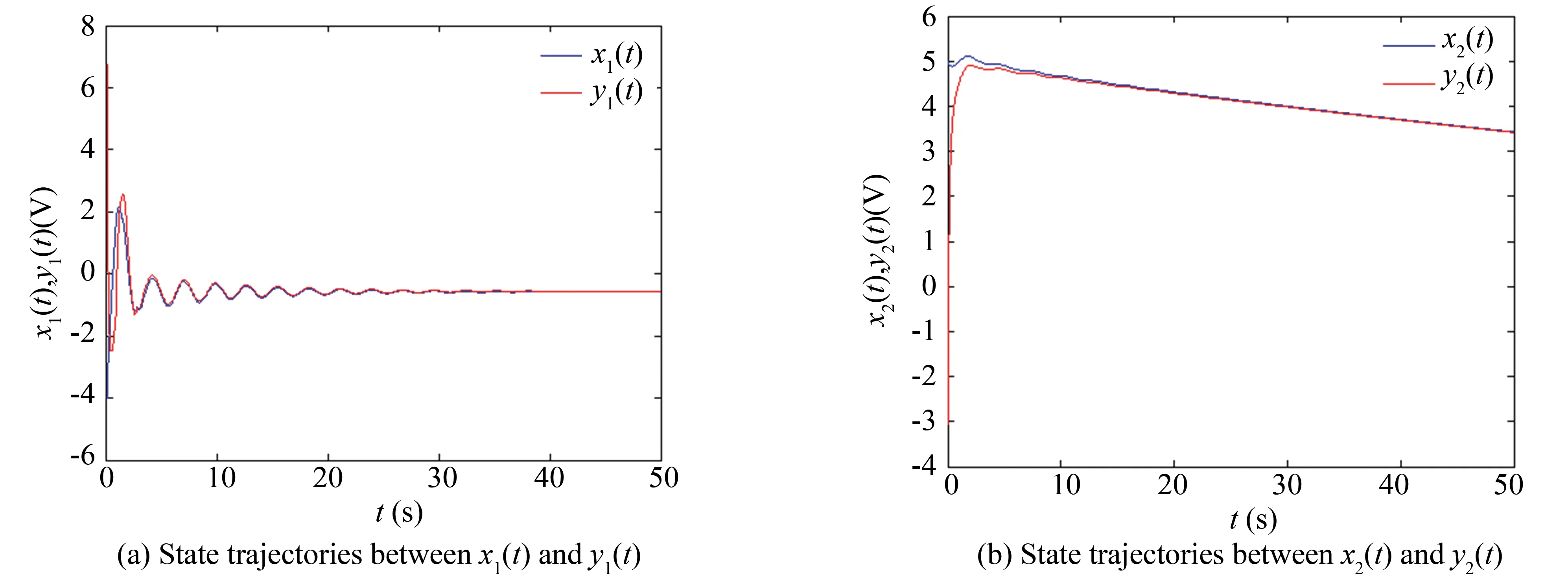
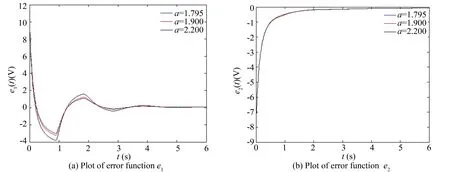
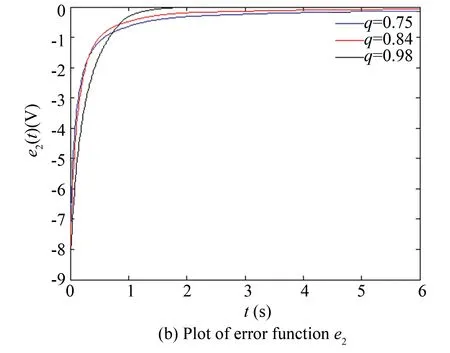
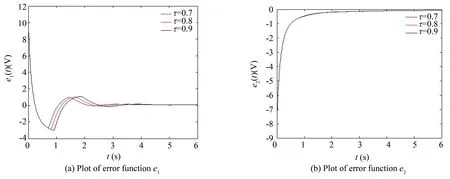
where Γ is the Gamma function,0≤m-1 Definition2: Laplace function defined by the Caputo definition is written as (3) wherem-1 To introduce memristive systems, we generalize the original concept of the memristor and describe it as (4) in whichu,m, andnrepresent the internal state, input, and output of the memristive model. The memristive model discussed in this paper is written as (5) Fig.1 shows the circuit principle diagram of the discussed system[31]. The delayed chaotic system consists of four resistorsR1,R2,R3,R4, two integratorsU1,U2, a delay unit, a capacitorC1, a voltage followerU3, DC voltage (Vc=1VDC), and a generalized memory element. By using the Kirchhoff’s circuit laws, the characteristic equations of this system can be deduced as (6) in whichτis the time delay,Vsatrepresents the saturation voltage of the operational amplifierU2, andVC=1VDC. Fig.1 Circuital schematic diagram of a time-delay memristive chaotic system Assume that then the dimensionless form of Eq. (6) is written as (7) Eq. (7) is generalized to fractional-order form and expressed as (8) in which 0 LetDqx1=Dqx2=0, then (9) Clearly, Eq. (9) has no real solution ifd≠0, which means system (8) has no equilibrium point whend≠0. We also found that system (8) can exhibit chaotic attractors by numerical simulations although it has no equilibrium point. Therefore, the next step is to study the chaotic property of system (8) when there is no equilibrium. At present, there are mainly three methods to solve the problem of chaotic systems with fractional order, namely, frequency domain method (FDM)[32-33], Adams bashforth-moulton algorithm (ABM)[34-35],and Adomian decomposition (ADM)[36-37]. When detecting and analyzing chaotic behaviors in non-linear systems, it is relatively more precise and convenient for ABM and ADM, while FDM is not always useful and trustworthy. Thus we adopted the modified ABM in numerical simulations. The simulation results of bifurcation diagram can be used to effectively determine the important dynamical properties of chaotic systems with fractional order. When fixingq=0.84, the parameters were set asb=0.02,c=0.1,d=0.001,τ=0.9. The initial conditions (0.1, 0.1) and the parameterawere adjusted. Then system (8) produced abundant phenomena with the variation of the parametera(Fig.2(a)). The asymptotically stable state of system (8) was observed in the intervala<1.58. The stable state ata=1.5 is depicted in Fig.3(a1)-(a2). Then Hopf bifurcation occurred and system (8) generated the limit cycle. Further, the increase of the parameteraled to the chaotic state of the system. The specific situation ata=1.795 is shown in Fig.3(b1)-(b2). Whena=1.9, the single scroll attractor appeared in system (8) as illustrated in Fig.3(c1)-(c2). System (8) entered the hyperchaotic regime ata≥1.929 and the two-scroll hyperchaotic attractor of system (8) was generated ata≥1.969. The situation of the double hyperchaotic attractor fora=2.2 is depicted in Fig.3(d1)-(d2). When fixingq=0.9, system (8) exhibited a dynamic evolution law similar toq=0.84, from the asymptotically stable state to the appearance of the Hopf bifurcation to enter the chaotic area. Comparing Fig.2(a) with Fig.2(b), it was found that the larger the value of the orderqwas, the faster the evolution law accompanying the coefficient parameterachanged. System (8) is the drive system. By adding the controller to Eq. (8), the response system is rewritten as (10) in whichu1(t),u2(t) are the appropriate control terms. The error of drive-response system can be set as e1=y1-x1,e2=y2-x2 (11) Fig.2 Numerical bifurcation diagram with parameter a Fig.3 Chaotic attractors of delayed system (8) with the parameter a change For Eqs. (8)-(10), the following error system can be written as (12) The nonlinear control input is defined as (13) whereK1,K2are control parameters. Substituting Eq. (13) into Eq.(12), then we obtain (14) By discussing and analyzing the stability of error system (14) with zero solution, it is possible to reach synchronization between the drive system (8) and the response system (10). Then we studied the state of the positive and negative real parts of all the roots of the characteristic equation det(Δ(s)). If all of them possess negative real parts, the error system (14) with equilibrium point can be asymptotically stable[38], and the antisense is not. The characteristic equation is s2q+(K1+K2-b)sq+asqe-sτ+ aK2e-sτ-K2(b-K1)=0 (15) Let Simplify Eq. (15), then we can obtain s2q+ψ1sq+ψ2sqe-sτ+ψ3e-sτ+ψ4=0 (16) (17) Simplify Eq. (17), then (18) where (19) From Eq. (18), we can get (20) Then |w|4q+F1|w|3q+F2|w|2q+F3|w|q+ F4=0 (21) where (22) Apparently, for 0 K1≥b,K2≥0 (23) Suppose that Eq. (15) has two negative eigenvalues, which means if all the roots have negative parts for Eq. (15) withτ=0, all the principal minorsΔi(i=1,2) must be non-negative. Thus we can obtain the following condition holds K1>b-a,K2>0 (24) On the basis of Corollary 3[39], we drew the following conclusions: Stability criterion of Eq.(15): System (15) with zero solution is Lyapunov globally asymptotically stable if and only ifK1andK2meet both conditions (23) and (24), which means that system (8) is synchronized with system (10). The parametersb,c, anddin system (8) are the same as those in Section 3. The suitable control parameters satisfying conditions (23) and (24) were selected asK1=K2=5. The initial values of system (8) and (10) were set as (x1(0),x2(0))=(-4,5) and (y1(0),y2(0))=(8,-4), so the initial condition of the error Eq. (14) was (e1(0),e2(0))=(12,-9). Leta= 1.795,q=0.84,τ=0.9, as shown in Fig.4, then system (8) synchronized with system (10). Meanwhile, the error synchronization was zero in Fig.5. Fig.4 Evolutions of drive-response system Fig.5 Synchronization errors e1,e2 In order to stabilize the chaotic state of the system (8) as the parameteravaries, the effects of the parameteraon synchronization were discussed when settingq=0.84,τ=0.9,a=1.795, 1.9, 2.2, as shown in Fig.6. It is clear that the synchronization state ofe1was slower as the parameteraincreased in Fig.6(a). Since the errore2of system (14) was independent of the parametera, the synchronization state ofe2remained unchanged with the increase ofa, as shown in Fig.6(b) . Fig.6 Synchronization errors at a=1.795, 1.9, 2.2 When fixinga=1.795,τ=0.9,simulations about the effects of the orderqon synchronization are shown in Figs.7 by giving three cases of the orderq, namely, 0.75, 0.84, and 0.98. It can be found that the faster the order increased, the slower the errore1trended to synchronize, and the faster the errore2tended to synchronize. In this part, we discuss the impact of time delayτon the synchronization. Fora=1.795,q=0.84, three cases of the time delayτ, i.e., 0.7, 0.8, and 0.9 were analyzed and the simulation outcomes of the effects of the time delayτon synchronization are depicted in Figs.8. As shown in Fig.8(a),the synchronization errore1went faster with the decrease of time delayτ. Thee2of the error system (14) was unrelated to the time delayτ, and thus the synchronization of thee2remained unchanged with the increase ofτin Fig.8(b). Fig.7Synchronizationerrorsatq=0.75,0.84,0.98 Fig.8 Synchronization errors at τ=0.7,0.8,0.9 This paper mainly introduces a fractional-order time-delayed memristive differential system without equilibrium point. As the parameterachanged, complex and rich chaotic attractors emerged in the system. Sufficient stability criteria of the factional-order delayed system were derived to deal with chaos synchronization of the proposed systems. Besides, the parametera, fractional orderq, and time delayτwere used as bifurcation parameters to study the impact of the system on synchronization. Results showed that as the parameteraincreased, the synchronization state ofe1went slower and the synchronization ofe2remained unchanged. With the growth of the orderq, the slower the errore1trended to synchronize, and the faster the errore2tended to synchronize. The synchronization of the errore1was faster with the decrease of the time delayτ, while thee2of the error system (14) was independent of the time delayτ, and thus the synchronization of thee2remained unchanged with the increase ofτ. The simulation results proved that the parametera, orderq, and delayτhave certain impacts on chaos synchronization, which verified the effectiveness and feasibility of the proposed method.2.2 Fractional-Order Delayed Memristive System without Equilibrium Point
3 Occurrence of Multiple Hidden Attractors in System (8)
4 Synchronization of System (8)
e1(t-τ)=y1(t-τ)-x1(t-τ)




5 Simulations Research

5.1 Effect of Parameter a
5.2 Effect of Fractional Order q
5.3 The effect of time delay τ

6 Conclusions
杂志排行

Journal of Harbin Institute of Technology(New Series)的其它文章
- Role of Composite Phase Change Material on the Thermal Performance of a Latent Heat Storage System: Experimental Investigation
- GEO Satellite Thruster Configuration and Optimization
- Disturbance Observer Design with a Bode’s Ideal Filter for Sigma-Delta Modulators
- Vibration Absorption Efficiency and Higher Branches Elimination of Variable-Stiffness Nonlinear Energy Sink
- Probability Response of Shape Memory Alloy Beam Subjected to Noise Excitation
- Heat Dissipation Performance of Metal Core Printed Circuit Board with Micro Heat Exchanger