无极绳车远程控制系统在煤矿采煤工作面的推广应用
2020-03-14李雨明
李雨明
(阳煤集团三矿生产调度指挥中心, 山西 阳泉 045000)
引言
无极绳连续牵引车作为煤炭综采工作面辅助运输系统的主要运输设备,具有结构简单、维护方便以及效率高等优势[1]。因此,无极绳连续牵引车被广泛应用于工作面的辅助运输中。为进一步提升无极绳车的运输效率,将远程控制策略引入其控制系统中。
1 无极绳车存在问题
无极绳车作为综采工作面的关键辅助运输设备,其能够根据实际生产需求基于单速、双速以及无级调速对其运行速度进行控制。根据《煤炭安全规程》的相关规定,要求无极绳车运输重型设备时,其速度应控制在0.5~1.5 m/s之间;当运输物料时,其速度应控制在1.5~2 m/s之间;当运输人员时,其速度应控制在2~2.5 m/s之间[2]。因此,需实时掌握无极绳的运行状态,对其速度进行控制,以确保其满足《煤炭安全规程》的相关规定。
在大量积累生产数据并对现场调研的基础上发现,无极绳车存在以下问题:
1)当前控制系统无法准确获取无极绳车的实时运行状态;
2)目前应用于工作面的液压式过速释放器的制造工艺及安装相对复杂,无法在相对恶劣的综采工作面中推广应用;
3)作业人员无法实现对无极绳车的远程控制。因此,当前急需一套无极绳车远程控制系统,实现对无极绳车运行状态的实时监测及根据实际生产需求对其运行状态进行控制的功能。
2 无极绳车远程控制系统总体结构的设计
为实现对无极绳的远程监测与控制,特设计如图1所示的远程控制系统。
如图1所示,无极绳车远程监控系统由上位机和下位机组成,且上位机与下位机之间是基于无线传输方式实现其相互之间的通信。上位机主要功能为对无极绳车运行状态的实时显示、记录及远程控制;下位机的主要功能是对无极绳车速度、油压等参数的实时监测,并将所采集到数据通过无线传输方式传至上位机。上位机得到无极绳车的实时运行参数后,基单片机对数据信息进行分析处理,从而得出相应的控制信号,实现对下位机制动装置的控制或通过上位机发出报警等[3]。
本系统通过上位机与下位机之间的无线通信实现了对无极绳车的远程监测与控制功能。

图1 无极绳车远程控制系统总体结构
3 远程控制系统硬件的设计
无极绳远程控制系统的核心硬件为采集设备实时运行参数的传感器和对所采集到数据进行分析、处理的单片机。本节将对无极绳车远程控制系统传感器、单片机的选型进行设计。
3.1 传感器的选型与安装
根据控制需求,系统需要液压传感器对油压信号进行采集,需速度传感器对速度信号进行采集。综合考虑综采工作面恶劣的生产环境及功耗、电压等级等参数,针对速度传感器本系统选用霍尔测速传感器[4]。霍尔传速度传感器的安装示意图如下页图2所示。
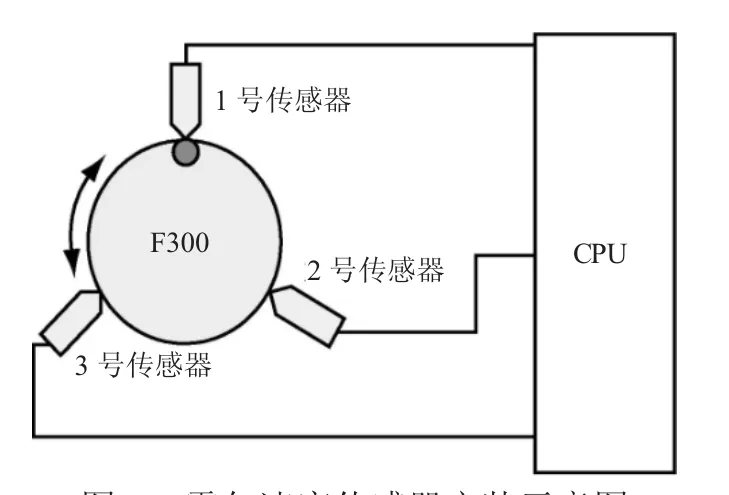
图2 霍尔速度传感器安装示意图
霍尔速度传感器安装于无极绳车车轮的外边缘,每个车轮安装3个霍尔速度传感器,即每两个霍尔速度传感器之间的夹角为120°。基于上述安装方式,不仅能够准确测得无极绳车的实时运行速度,还能够准确判断无极绳车的运行方向。
3.2 单片机的选型设计
单片机作为无极绳远程控制系统的核心,其对所采集到数据的处理和分析速度、精度直接决定系统对无极绳车控制的响应速度和控制精度。中断响应频率作为选择单片机的关键参数,该参数的计算如式(1)所示:

式中:Δt为单片机的中断响应频率;D为无极绳车车轮的直径,v为无极绳车的实时运行速度。本文所研究无极绳车车轮的直径D=300 mm,根据无极绳车的生产任务,其运行的最高速度vmax=10 m/s。
经计算可得,中断响应频率的最小值Δtmin=31.4 ms。经查阅相关手册可知,选用AVR系列的单片机即可满足控制要求。
鉴于无极绳远程控制系统应用于综采工作面,因此在该系统的各类电路均需按照本质安全电路的要求进行设计,相关设备应按照隔爆要求进行设计,以确保系统能够在采煤工作面稳定、可靠运行。
4 无极绳远程控制系统软件的设计
4.1 程序流程图的设计
无极绳远程控制系统所采用的核心控制器为单片机,因此其软件设计时是基于单片机的专用编程软件完成的。根据控制要求,单片机需实现以下功能:对数据的采集、处理;对无极绳运行参数的故障判断;根据分析结果得出控制信号,并将控制系统通过无线通信方式传输至下位机[5]。根据上述需求,设计如图3所示的程序流程图。
4.2 上位机界面的设计
鉴于LabVIEW软件功能丰富且易开发,本文基于LabVIEW软件对上位机系统进行设计。根据控制需求,上位机系统需实现以下功能:
1)实时显示无极绳车的运行速度,并对速度进行记录与存储;
2)当无极绳车运行遇到故障时,上位机发出报警;
3)上位机与下位机通过无线通信方式实现数据传输。

图3 远程控制系统程序流程图
基于LabVIEW所设计的上位机系统界面如图4所示。

图4 上位机操作系统界面
5 结语
无极绳连续牵引车为应用于综采工作面最为广泛的辅助运输设备,其运输效率直接决定综采工作面煤炭的产量及产煤效率。为进一步提升无极绳连续牵引车的自动化程度,提升其运输效率及安全性,实现无极绳车远程控制功能是必须的。本文基于液压传感器、霍尔速度传感器以及单片机等硬件设计了无极绳车远程控制系统。经实践表明,所设计的远程控制系统能够实时显示无极绳车的运行速度,并对无极绳车在实际运输过程中出现的抖动和过速现象进行实时准确监测,一旦出现故障系统可发出报警,实现了对设备的有效保护。