基于蒙特卡洛法的混合伸缩折臂式 高空作业平台车工作空间计算研究
2020-03-14陈添明姚占磊
陈添明,姚占磊,张 竟
(三一汽车制造有限公司,湖南 长沙 410000)
[关键字]伸缩折臂式高空作业车、工作空间计算方法、蒙特卡洛法
高空作业平台车的作用广泛应用于市政建设、消防救护、建筑装饰以及造船、石油、化工、航空等行业。它具有机动灵活、覆盖面广、到达作业地点能迅速投入工作等优点。其最重要的参数之一为工作平台作业范围,即在汽车底盘不移动的情况下,工作平台可以将人或器材运达的范围。因此,研究高空作业平台的可达空间,避免出现作业死区是十分重要的。
虽然高空作业平台的作业范围与机器人机械臂的工作空间在计算和求解上是属于同一类问题,但是高空作业平台的作业范围研究文献却很少。机器人机械臂的工作空间解法[1-3]通常有绘图法、解析法、数值法。绘图法是基于几何关系用CAD软件直接绘制工作范围曲线的方法,常用于自由度少的平面问题。解析法是基于公式表达式计算的工作空间计算方法,也是常用于自由度较少的情况,当自由度较多时公式复杂从而难以计算。数值法以极值理论和优化方法为基础,计算工作空间边界上的特征点,从而构成的工作空间边界曲线或曲面。该方法理论简单,操作性强,适合编程求解,但所得空间的准确性与取点的多少有很大的关系,而且点太多会受到计算机速度的影响。典型的工作空间数值法有搜索法、迭代法和蒙特卡洛法[4-6]。
相比于机器人机械臂的工作空间计算,高空作业平台的工作空间计算具有一定不同点:1)属于大型机械,长达几十米甚至上百米;2)多个转动与多个滑动运动自由度相结合;3)工作平台转动自由度需要自动调为水平。本文拟用蒙特卡洛数值法,把高空作业平台进行简化为6个自由度的运动学模型,研究其工作范围的计算和评估方法,为大型工程机械的工作空间范围计算提供一定 参考。
1 模型和方法
1.1 高空作业平台分析模型
本文研究对象如图1。
图1所示为高空作业平台的标准姿态,其主要分为下车、转台、上车3大部分。上车结构可分为1号臂的1~5节臂、2号臂的1~2节臂、3号臂、工作平台一共9个物体。

图1 高空作业平台车设计图
根据研究目的,做如下简化:(1)忽略下车和转台,仅考虑变幅平面内的影响,简化为平面二维问题,以1号臂根铰点为原点;(2)忽略臂节间的变幅和展开油缸,用转角变量代替油缸伸缩行程变量;(3)由于1号臂的5个臂节间靠油缸和绳排进行同步伸缩运动,实际是1个自由度,把1号臂的5个臂简化为2个物体。简化后的模型如图2。

图2 高空作业平台车分析模型简化图
简化模型包含6个物体:1号臂2个物体OA和AB,初始长度为;二号臂2个物体BC和CD,初始长度为LBD;三号臂1物体DE,初始长度为LDE;工作平台1物体EFG,其中EF为工作平台底部,要求保持水平角度,G点为工作平台最外侧顶点。
1号臂的OA和AB相对滑移铰自由度用s1表示。OA相对于水平转角用α表示。AB和BC夹角用β表示。BC和CD相对滑动用s2表示。CD和DE夹角用γ表示。DE和EF夹角用θ表示。模型一共6个自由度:s1,α,β,s2,γ,θ。
以下推导工作平台G点位置的计算公式。
初始时刻位姿时

记初始时刻矢量

其中 φ0为工作平台∠GEF角度,为已知量。
分别记角度α,β,γ,θ变换的方向余弦阵为

则工作平台G点的表达式为

由于要求工作平台时刻保持水平,有角度关系补充方程

因此,实际上是5个自由度的求解。
1.2 工作空间蒙特卡洛法
蒙特卡洛法(Monte Carlo Method),又叫做统计模拟法,是借助于随机抽样(伪随机数)进行计算的数值方法。该方法适合于公式不能直接求解模型较为复杂的情况,只要给定变量的取值范围,对变量进行随机离散代入抽象模型,算出解集。
蒙特卡洛法求解工作空间基本步骤如下:
(1)给定6变量的取值范围,生成伪随机变量:

(2)随机生成N点的伪随机数代入方程,求解出对应N个姿态的工作平台位置。最后把绘制N点坐标值,即为工作平台的作业范围。
当N取值较小时,所求解的空间精度会不足,当N足够大时,即可获得满意的解。解的精度可用点的包络曲线图面积进行评价。图3是工作空间包络图示意。

图3 工作空间包络线包络面积计算图
假设虚线包络的面积Areal是工作空间真实解。实线为经过蒙特卡洛法计算的当前解外围点包络线包络面积Asolve。当

越趋近于1则表明计算的工作空间越逼近真 实解。
包络线包络面积的计算可以把包络线根据x的最小值和最大值为特征点进行分割投影计算。如上图所示,A点为x最小值点,D为x最大值点。ABCD连线与x轴的投影A’B’C’D’可分解为3个平行梯形,从而计算出其面积。同理,可以计算出DEFA与x轴围成的面积。两面积之差就是当前解包络线包络面积Asolve。当包络区域跨过x轴即y值有正负时,可对区域进行y轴正向平移,使得包络区域在都在y正向时再计算。这里给出的是连续闭环实心的包络线工作面积计算方法,较为复杂时也可近似分解计算。
然而,随着自由度的增加,基本算法的解在接近工作空间真实解包络线的点数变得稀疏不均匀,不利于逼近真实解。原因是在边界附近随机点分布不够多,取值离散点不足够引起的。改进的方法如图4所示。

图4 变量上下限分割示意图
思路是对原变量的最大最小值之间进行分割,适当选取分割区间值作为上下限去生成伪随机变量,计算对应的工作空间。如上图示例,实线之间是原变量的上下限区间,分割后用上下边界两套区间θi1~θi2、θin-1~θin以及中间一些区间(如可间隔选取)代替原区间生成伪随机变量后的计算更有利于获得边界的解。
2 算例
参数表如表1。

表1 参数表
θ自由度为工作平台调平角度,其最值是由式(13)确定。
利用以上参数对高空作业平台车进行作业范围的计算。研究不同离散计算次数对结果的影响。
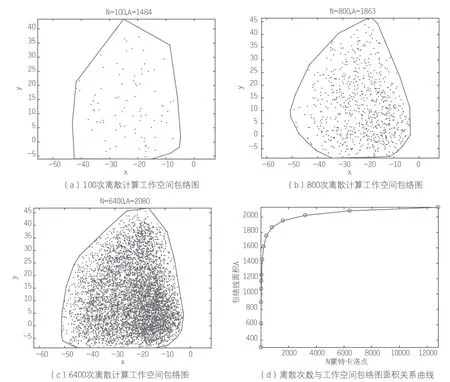
图5 蒙特卡洛法计算次数与包络面积关系图
为获得更好的统计数值,减少误差,图5每个离散计算均进行500次,获取该计算次数下的工作空间解包络线面积的平均值。图5(a)为进行了100次离散计算的工作空间图示,中间的离散点较为稀疏,包络线有角尖,不平滑,面积为1484。图5(b)是800次离散计算工作空间图示,离散点比图5(a)的多了,包络线也光滑,面积为1863。图5(c)为计算6400次离散点计算工作空间图示,点数足够多,边界也比图5(b)光滑,面积为2080。图5(d)也表示了随着蒙特卡洛法离散计算点的增加,包络曲线的面积越来越大,并且逐渐趋近于水平的稳定值。说明所求解的工作空间越来越逼近真实解。
为了解改进算法对计算结果的影响,进行同样500次计算统计,以及相同离散点求解结果的对比。计算结果见图6。
由图6(a)、(b)、(c)计算可见,相同次数的离散计算,改进算法均比基本算法包络面积都更大些。而且图6(c)表明,计算结果包络线比图5(c)更光滑,离散点分散更到位些。图6(d)的工作空间包络面积曲线对比图更说明了改进算法的有效性。
3 结束语
本文有别于机器人机械臂工作空间的求解,做了3方面的工作:(1)建立了伸缩折臂式高空作业平台车的工作空间作业范围求解理论模型;(2)提出了用离散点包络线包络面积来评估工作空间解的方法;(3)提出了对变量进行分割处理后再进行蒙特卡洛法的工作空间改进算法。这些工作可以为高空作业平台车以及类似的机械产品工作空间求解提供一定参考。
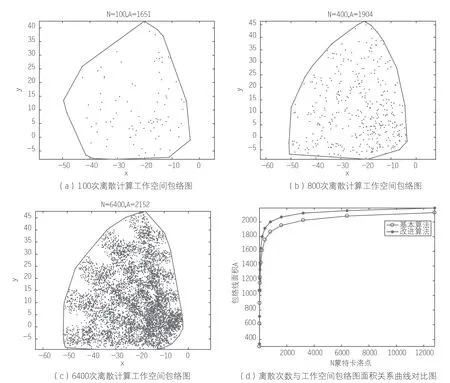
图6 改进蒙特卡洛法计算次数与包络面积关系图
