农用植保无人机精准施药定位系统的优化设计
2020-03-14陶婧
陶婧
农用植保无人机精准施药定位系统的优化设计
陶婧
(芜湖职业技术学院,安徽芜湖,241006)
农用植保无人机凭借其作业效率高、运行成本低、作业时间灵活、喷洒效果好等特点,逐渐取代了传统的人工喷药装置,在绿色农用植保领域得到了广泛的应用。精准施药定位系统是农用植保无人机飞行控制的“大脑”。目前,市场上绝大部分的农用植保无人机安装的是GPS定位系统。然而该系统遇到复杂环境时容易产生定位偏差,且受地形障碍物影响较大,从而导致飞行作业的精确度差、危险系数高,严重地制约了植保无人机的发展。利用双GPS与GPRS网络定位服务相结合的方式研发设计的一种在复杂环境下也能为无人机提供高精度定位服务的混合定位系统,确保了农用植保无人机施药的高效性和精准性。
植保无人机;精准定位系统;GPS;GPRS
随着近年来科技水平的不断提高,无人机的应用从最初的目标定位识别、军事侦查监视、测绘摄像等逐渐延伸到农业领域。在农业发展中,病虫害影响极其巨大,是影响农作物产量的最重要因素,而农用植保无人机技术是防治病虫害的前沿技术。植保无人机喷洒作业具有效率高、劳动强度低、综合成本低、不损伤作物、节约用水用药、防治效果好等优点[1],逐渐取代了传统的人工喷药装置,在绿色农用植保领域得到了广泛的应用。
无人机定位系统作为农用植保无人机飞行控制的“大脑”,是实现无人机自主导航控制和飞行的关键。想要实现精准施药,精准定位是第一步。在植保作业中必须借助先进的定位技术对无人机的飞行路线进行高精度定位。近年来,以全球定位系统(GPS)为代表的卫星定位技术的出现,使得无人机植保作业成为可能。目前市场上绝大部分的农用植保无人机仅安装了GPS定位系统,遇到复杂环境时容易产生定位偏差,且受地形障碍物影响较大,从而导致飞行作业的精确度差、危险系数高,这严重地制约了植保无人机的发展[2-4]。针对这一问题,我们从技术指标要求出发,采用国内外现有成熟技术,对植保无人机的精准定位系统进行优化设计,在不影响系统稳定性的条件下对GPS定位系统的结构进行优化升级,利用双GPS与GPRS网络定位服务相结合的方式,研发和设计了一种在复杂环境下也能为无人机提供高精度定位服务的混合定位系统,以确保农用植保无人机施药的高效性和精准性。
1 定位技术
GPS(Global Positioning System)全球定位系统技术利用定位卫星系统为GPS 用户提供精确的导航和定位服务,其定位示意图如图1 所示。整个系统由GPS导航卫星、地面基站及用户终端设备构成,用户终端设备主要用于接收GPS信息,GPS导航卫星以及地面基站则负责提供位置信息服务。在无人机自主飞行过程中,GPS 提供的位置信息服务可以对无人机进行自主导航和作业线路规划,因而被广泛地应用于各种无人机自主飞行控制系统中[5]。
GPRS(General packet radio service)无线分组交换定位技术又称为LBS(Location Based Services)移动基站定位技术,主要借助于 GPRS网络基站信号实现定位,其定位原理示意图如图2 所示。相对GPS定位系统而言,GPRS定位系统不仅定位精度更高,对环境的要求更低,还可以最大限度地抵抗各种其它不可抗因素给定位信号带来的干扰,实现室内外的全方位一体定位。它与GPS定位系统的结合使用可以极大的提高定位服务的精确性。

图1 GPS 定位原理示意图

图2 LBS 定位系统原理示意图
2 植保无人机定位系统设计
2.1 植保无人机定位系统硬件组成
无人机定位系统主要由定位终端和空中GPS导航卫星、GPRS/GSM网络、飞行主控制器、速度传感器、电机驱动控制器、地面基站及用户端组成(如图3)。飞行主控制器采用JIYI K3-A作为控制核心,对GPS、GPRS传感器、速度传感器等模块的信息进行采集;用户端再接收GPS、GPRS接收模块采集回来的定位数据,数据经处理后进行传输。该系统主要利用模块的串口对模块进行控制:控制模块读取GPS和GPRS的位置信息,系统根据这些模块提供的位置信息执行相应的控制算法并输出控制信号以实现对电机的控制,进而实现对植保无人机作业的精准稳定控制。

图3 定位系统硬件结构图
2.2 植保无人机定位系统软件设计
本研究中的农用植保无人机的主控制器采用JIYI K3-A。为了实现对无人机精准施药的定位控制,其软件主程序流程如图4所示。

图4 定位系统主程序设计流程
系统运行定位控制软件时,首先初始化姿态控制参数,即对植保无人飞行器的姿态控制参数进行初始化,保持无人飞行器的当前飞行姿态和飞行动作;再对GPS/GPRS定位系统进行初始化,系统进行定位控制相关算法;最后设置施药航线、作业面积、施药量等,无人机通过读取设计信息,执行数据融合算法,最后起飞作业。
2.3 航线设计
植保无人机采用K3-A飞控,能精准响应指令,作业操控简单。喷洒作业时,无人机可采用3种作业模式,分别是智能模式、辅助模式与手动模式,能应对各种地形,可在飞行中直接规划路线,也可以提前预设飞机的飞行高度、航带间距、飞行速度等。为配合农用植保无人机的快速精准作业,一般在飞行作业任务前,结合作业任务要求和施药地形状况,设计农用植保无人机航线规划,进入任务要求界面(如图5),输入喷洒任务指标后程序将自动计算其飞行相关参数,生成飞行航线,同时将航线规划信息存储在数据库中,便于地面控制设备读取航线规划信息,确认无误后发送给无人机[6]。

图5 农用植保无人机飞行航线设计图
2.3.1绕障碍物飞行设计
在无人机飞行作业过程中,将上述高精度定位系统安装到该型植保无人机平台上,为其提供位置信息服务。在飞行过程中,无人机将根据任务规划的预定航线和定位系统给出飞行实际位置[7]。遇到障碍物时,无人机会发出信号;同时,具有自主飞行能力,能绕过障碍物继续飞行作业(如图6)。

图6 农用植保无人机扰障碍物飞行图
2.3.2无人机续喷设计
为了精准施药,该农用植保无人机安装了断点记忆自动返航双GPS。无人机具备全自动作业模式,拥有断药、断点续喷等功能。当无人机在自动作业中电池电量过低或者农药喷洒完毕时,会自行记录断点位置及经纬度坐标(如图7所示),并自动返航降落;待工作人员处理后,无人机又继续飞到断点位置继续喷洒作业,可有效避免漏喷、重喷,真正做到精准施药。
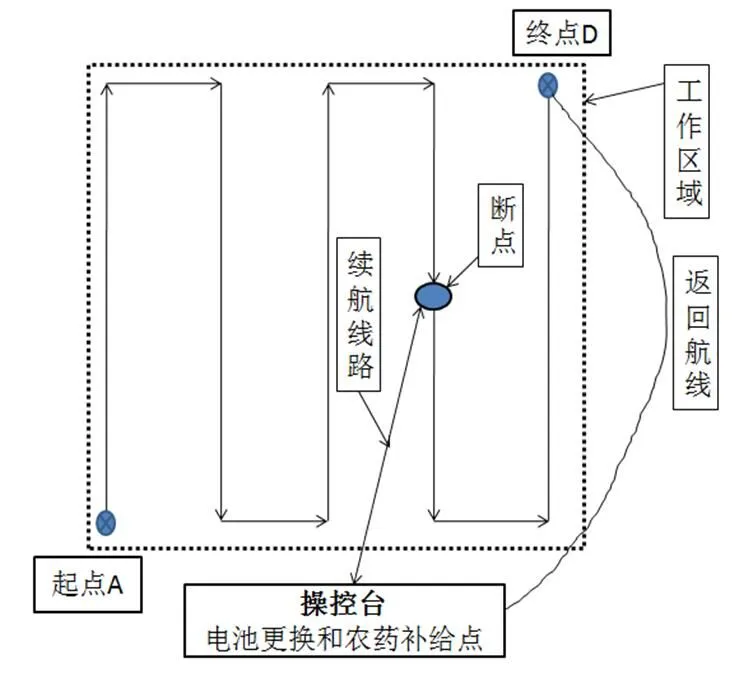
图7 农业植保无人机断点续喷模拟图
3 试验仿真测试
为了进一步验证其正确性和可靠性,我们在青岛智飞航空无人机K6-10六旋翼植保无人机平台上进行测试。测试过程中,我们将基于双GPS和GPRS开发设计的新型混合定位系统安装到该型植保无人机平台上,为其提供位置信息服务,让原无人机和设计后的无人机分别进行喷洒测试。我们对试验地进行划分,每10 m为一条航线,航线带宽设计为1.5 m,纸张宽度为1.9 m,两边各有20 cm压边不计算面积,总计18条航线带。两组无人机各进行9条航线带的飞行喷洒作业试验,每个航线带上铺设遇水变色纸;通过喷洒自来水观测纸张变色情况;测量每张纸上未变色的面积,并对测量结果进行统计分析(分析结果见表1)。
通过测试分析可知,试验组平均未变色纸张面积为1.51 m2,对照组平均未变色纸张面积为1.93 m2。由此可见,该混合定位系统可以为植保无人机提供更精确的位置信息服务,大幅度提高了植保无人机的飞行控制精度,真正做到精准施药。

表1 纸张变色情况分析表
4 结论
传统的植保无人机采用单一的GPS定位系统,遇到复杂环境时容易产生定位偏差,且受地形障碍物影响较大,从而导致飞行作业的精确度差、危险系数高等问题。利用双GPS与GPRS网络定位服务相结合的方式研发设计的一种新型高精度定位系统,确保了农用植保无人机施药的高效性和精准性。从无人机平台K6-10的试验结果可以看出,该定位系统能有效提高无人机的定位精度,对实现无人机的精准施药具有重要的意义。
[1] 丁绍伟,郭可婧,曾培青,等. 小型植保无人机防治稻纵卷叶螟田间试验[J]. 现代农业科技, 2017(7):115,119.
[2] 马金伟,江冰.基于GPS/GPRS的车载卫星定位系统的研究[J].计算机测量与控制,2006(12):1676-1679.
[3] 任子晖,付华科,杜艳,等. 基于GPS/GPRS的校园定位监控系统设计[J]. 徐州工程学院学报(自然科学版), 2011,26(3):7-10.
[4] 袁玉敏. 农业植保无人机高精度定位系统研究与设计——基于GPS和GPRS[J]. 农机化研究, 2016,38(12):227-231.
[5] 刘绍锋,王旭景. 农用植保无人机的推广应用[J]. 山东农机化, 2016(2):49-50.
[6] 于广瑞,王智超,张坤鹏,等. 基于测绘型无人机航线优化设计应用研究[J]. 北京测绘, 2015(4):46-48,70.
[7] 周炜,魏瑞轩,董志兴. 基于层次分解策略无人机编队避障方法[J]. 系统工程与电子技术, 2009,31(5).
Optimization Design of the Precision Pesticide Application Positioning System for Agricultural Plant Protection UAVs
TAO Jing
Agricultural plant protection UAVs have gradually replaced traditional manual spraying devices due to their high operating efficiency, low operating cost, flexible operating time, and good spraying effect. They have been widely used in the field of green agricultural plant protection. The precision pesticide application positioning system is the “brain” of flight control for agricultural plant protection UAVs. Currently the most of agricultural plant protection UAVs on the market are installed with GPS positioning systems. However, the GPS positioning system is prone to positioning deviations when encountered with complex environments and greatly affected by terrain obstacles, which leads to poor accuracy and high risk during flight operations and seriously restricts the development of plant protection UAVs. A hybrid positioning system that can provide high-precision positioning services for UAVs in complex environments, developed and designed through the combination of dual GPS and GPRS network positioning services, ensures high-efficiency and accuracy of agricultural plant protection UAVs.
UAV (unmanned aerial vehicle); precise positioning system; GPS; GPRS
TP391
A
1009-1114(2020)03-0055-04
2020-04-19
陶婧(1985.9—),女,安徽枞阳人,讲师、数据库系统工程师,主要研究方向为软件开发和数据库及其应用。
研究项目:芜湖职业技术学院重点科研项目“基于农作物数据分析实现无人机自动化作业系统研究”(wzyzrzd201704);2019年度安徽省职业与成人教育学会科研规划课题“高职院校智慧课堂教学模式的构建与实践”(Azcj051); 2019年度安徽高校人文社会科学研究重点项目“AI+教育背景下高职大学生职业能力构建研究”(SK2019A0846)。
文稿责编 张俊
