先进战斗机过失速机动模型飞行试验技术
2020-03-13何开锋毛仲君
何开锋, 刘 刚, 毛仲君, 汪 清, 贾 涛, 章 胜
(1. 空气动力学国家重点实验室, 四川 绵阳 621000; 2. 中国空气动力研究与发展中心, 四川 绵阳 621000)
0 引 言
20世纪80年代,德国MBB公司先进战斗机部主任Herbst博士提出了“超机动性”概念[1-2],即战斗机从常规飞行状态,通过操纵面及推力矢量控制快速拉起,迎角迅速达到并超过失速迎角(最大迎角超过70°),且迅速改变飞机速度矢量和机头指向的一种机动形式(又称为过失速机动)。在近距空战中,具有过失速机动能力的战斗机能够取得快速占位、先敌瞄准、有效规避攻击的战术优势。因此,过失速机动技术成为第四代战斗机空气动力技术的基本要求,也是其重要的标志性性能特征[3]。
由于过失速机动飞行处于大迎角(通常在70°以上迎角)飞行状态,大大超越了常规的安全飞行包线,空气分离流动非常复杂,气动力呈现强烈非线性、非定常以及非对称,很容易进入尾旋等危险或失控飞行状态,风险非常高[4-5]。
模型飞行试验是按照动力学相似规律,利用飞行器缩尺模型在真实大气中进行模拟飞行,研究和验证气动力/热特性、新概念、新技术和新布局的试验手段和方法[6]。相比地面试验,模型飞行试验具有模型运动无约束、模拟参数广泛、具有气动/结构/飞行/控制/动力等问题综合的特点,模拟环境更接近真实飞行条件。相比真实飞行器的全系统飞行试验,模型飞行试验具有周期短、成本低、风险小等特点。模型飞行试验技术随着飞行器诞生而诞生,在百年航空发展史中始终贯穿于基础问题研究、新概念布局创新、新技术发展、飞行器工程研制以及试验鉴定等全过程。同时,模型飞行试验作为空气动力学研究三大手段之一,在飞行器研制及空气动力学科发展中有着不可替代的作用[7-8]。
利用模型飞行试验的特点和优势,开展先进战斗机缩比模型过失速机动演示验证飞行试验,获得过失速机动的动力学特性、大迎角非线性非定常气动特性,验证过失速机动非线性控制律,对于指导真机开展过失速机动飞行、保证飞行安全性和提高任务能力等具有重要作用[9-10]。
1 国内外发展概况
随着现代飞机气动布局不断创新,新概念/新技术不断应用,飞行包线不断拓展以及飞行性能不断提升,应用缩比模型(验证机)对新布局、新概念、新技术以及飞行包线边界进行探索和验证,在解决飞行器设计中的技术障碍和难题、实现技术创新等方面发挥了重要作用。为此,模型飞行试验及演示验证技术引起了广泛关注和重视,成为飞机设计、气动及飞行试验领域新的热点[7]。
20世纪80年代,NASA兰利研究中心对X-29和X-31这类大迎角高机动性验证机进行了无动力缩比模型投放试验,对于解决静不稳定构型控制、失速/偏离/尾旋特性、过失速机动飞行控制等问题发挥了重要作用[11]。同期,在兰利研究中心全尺寸风洞中对X-31大迎角和高机动性验证机、YF-22战斗机原型机等缩比模型开展了大量动态稳定性和操纵性的自由飞试验,研究、评估和验证了推力矢量系统、迎角/侧滑角等传感器、大迎角非线性控制律等关键系统及关键技术,为后续真机大迎角飞行试验提供了重要的技术支撑[12-13]。
从20世纪80年代以来,NASA开始大力发展外场带动力模型飞行试验技术,在兰利研究中心、艾姆斯研究中心和德莱顿飞行研究中心利用带动力缩比模型试验研究了先进战斗机、通用航空飞机、民用飞机等构型的气动和飞行动力学问题,在新概念气动布局、大迎角动态稳定性和操纵性、高敏捷性大机动飞行技术等方面取得了重大突破和成果[14-20]。
在以上研究基础上,20世纪90年代,美国和欧洲开始利用X-31、F-16MATV、F-18HARV以及YF-22等专门的验证机来验证过失速机动[21],进行了大量试飞研究工作,采用气动舵面与推力矢量结合的控制手段,先后完成了“眼镜蛇”机动(图1)、“Herbst”机动(图1)、过失速筋斗、直升机机动等动作,发展了实用化的过失速机动飞行及控制技术,并将结果应用到第四代战斗机F-22和F-35的研制中。F-22可以完成“眼镜蛇”、“尾冲”、“锥子”等比较简单的过失速机动,也可以完成在水平盘旋中进入失速状态,然后绕速度矢量滚转成直立的稳态大迎角飞行的“猫鼬”动作和难度最高的“Herbst”动作。通过控制律设计简化了飞行员操纵,满足“无忧虑”飞行要求,使一般飞行员也可以掌握过失速机动[22]。
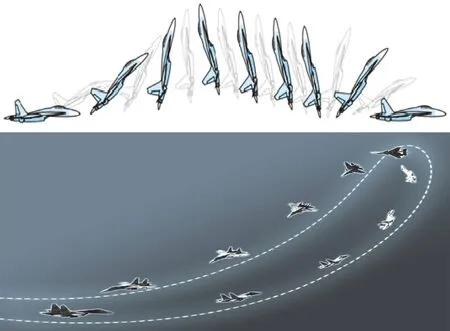
图1 “眼镜蛇”机动和“Herbst”机动示意图Fig.1 Illustrations of Cobra maneuver and Herbst maneuver
俄罗斯(前苏联)在同期也对过失速机动进行了大量研究和验证飞行,最著名的是1989年6月巴黎航展上由试飞员普加乔夫驾驶Su-27表演的“眼镜蛇”机动,此外还有Su-30MKI“绕速度矢滚转”和“锥子”机动、米格-29OVT的“Herbst”和“直升机”机动等。
近年来,中国空气动力研究与发展中心(以下简称“气动中心”)在国内率先发展和建立了航空飞行器带动力自主控制模型飞行试验技术,突破了大迎角非定常空气动力建模[23-24]、大迎角飞行参数测量[25]、非线性控制方法[26-32]、推力矢量技术[33]、过失速机动模型飞行试验[9-10]等关键技术。同时,在8 m×6 m低速风洞中建立了低速风洞模型自由飞试验手段,开展了先进战斗机构型风洞虚拟飞行试验和大迎角气动、飞行及控制特性研究[34-36]。2015年,气动中心与成都飞机设计研究所合作,在国内首次完成了先进战斗机构型缩比模型典型过失速机动飞行试验。中国飞行试验研究院也对过失速机动相关技术进行了研究[37-39],并在2018年开展了战斗机构型缩比模型典型过失速机动飞行试验。
2 系统主要构成
航空飞行器带动力自主控制模型飞行试验系统主要由试验模型系统和地面测控系统组成(图2)。试验模型与地面测控系统通过无线数据链进行指令、数据及图像等信息的通信交互。

图2 带动力模型飞行试验系统构成Fig.2 Constitution of powered flight test model system
2.1 试验模型系统
试验模型系统主要由模型机体结构、动力系统、飞控系统、测量系统、机载电源、起落架系统、应急伞降回收系统等组成。
模型机体一般采用铝合金或碳纤维主梁+铝合金隔框的承力结构,表面采用玻璃钢或碳纤维蒙皮。机翼、尾翼、舵面等超薄结构件采用单块式结构形式,内部布置主承力梁,表面为一体成形玻璃钢或碳纤维蒙皮,内部空间采用高强度泡沫(PMI)填充以增加其结构强度和刚度。
动力系统采用小型涡喷(涡扇)发动机(推力几十~百kgf量级),根据试验模型外形及推重比模拟要求可选用单发、双发或多发配置。动力系统组成包括发动机本体、供油系统、供气系统、启动装置、控制系统单元和地面支持单元等。
飞控系统采用专门为模型飞行试验研制的小型化飞控系统或选用小型无人机用的低成本飞控系统成熟产品,它们一般由低功耗嵌入式处理器与低成本传感器(如MEMS陀螺仪、MEMS加速度计、微型GPS接收机、微型气压传感器及微型磁罗盘)等集成而成。伺服系统采用针对模型飞行试验需求研制的专用舵机,具有高带宽、低时延、小间隙、高精度等特点,条件不具备时也可选用合适的航模级舵机货架产品。
测量系统主要由测量传感器、数据存储、数据链等组成。试验模型飞行状态信息(包括空间坐标位置、地速、欧拉姿态角、角速率、过载等)采用高精度光纤组合惯导进行测量,条件不具备时也可由飞控系统内置的微型GPS、MEMS陀螺仪及加速度计等进行测量,但其测量精度的不足会对后期气动参数辨识精度带来影响。气流参数(动压、静压、空速、迎角、侧滑角等)根据飞行迎角(侧滑角)、速度范围及动态响应频率等可选用风标传感器、五孔/七孔探针或其组合测量系统进行测量。数据存储系统须满足数据通道、速率及总存储量等要求。数据链带宽须满足数据/图像实时传输要求,有效传输距离须覆盖飞行试验空域,并具有全向及良好的抗干扰特性。
机载电源采用满足试验模型各系统供电需求的集成式电池,要求其在高空低温条件下具有良好放电特性。
起落架系统根据试验模型质量、内部空间等进行专门设计,根据模型质量、收放力矩需求收放机构可采用电动、液压或电液等驱动方式。
应急伞降回收系统在试验进入非正常状态时打开,以保障飞控系统、测量系统、动力系统等高价值设备的安全回收。其主要由回收伞、控制电路、开伞机构、脱伞机构等组成。可选择十字伞或圆伞,其面积根据应急回收时能够保全模型主要设备和结构的最高接地速度(过载)进行设计和选取。
2.2 地面测控系统
地面测控系统主要由地面控制站和光学摄像设备等组成。
地面控制站系统由测量数据分析显示记录站、飞行试验状态监控站、试验指挥站、遥控发射及遥测接收机等组成,可以将它们整合集成在指挥控制测量车上。无线电信息传输系统的遥控发射机、遥测接收机的天线布置安装在测量车合理位置,并集成发电站、UPS系统等支持设备。
光学摄像设备一般包括光学经纬仪、高速摄像机等。光学经纬仪主要用于测量试验模型航迹参数并获取其飞行姿态图像,高速摄像机用于记录试验模型起飞/着陆阶段运动参数及图像。
3 关键技术
过失速机动是一种超过失速迎角域的边界状态飞行,相比于常规飞行包线内的模型飞行试验,过失速机动飞行试验需要突破大迎角非定常气动力建模方法、大迎角宽量程气流系参数测量、非线性控制方法及控制律设计、推力矢量控制系统、大迎角非定常气动参数辨识等关键技术。
3.1 大迎角非定常气动力建模方法
战斗机在大迎角过失速状态飞行时,机翼和机身将产生大的流动分离区,分离流场中不同涡系之间相互干扰且与飞机不同部件相互作用,使飞机空气动力特性呈现复杂的非对称、非线性、纵横向强烈耦合以及流场时间迟滞效应等[23, 40]。
有别于常规迎角范围内气动力建模采用导数形式的气动力模型,在大迎角过失速机动飞行状态,气动力导数模型不再适用,主要原因有三方面:一是动导数与振动频率、幅值密切相关,在气动力建模和控制律设计中不能简单地使用动导数概念;二是非定常气动力的显著特征是与运动历程密切相关,动导数概念不足以反映气动力的非定常特征;三是与静态气动特性相比,非定常效应已不再是小量,对操稳特性和飞行控制有明显影响,不能简单作为不确定度来处理。
通过对典型过失速机动过程的深入分析,复杂过失速机动是由一些基本动作组合而成[41]。为减小难度,降低风险,可首先对基本过失速机动动作(又称为“里程碑机动”)分别进行研究,这些基本动作包括以下三种:一是大迎角稳态飞行,二是大迎角下绕速度矢滚转,三是动态拉起迎角进入过失速状态(图3)。而其它复杂过失速机动都可以视为这三个基本动作(或逆动作)的不同组合,如“Herbst”机动过程可分解为:M0.3左右速度水平进入,动态拉起至70°左右迎角(基本动作三);绕速度矢滚转180°(基本动作二);以70°迎角保持稳态飞行(基本动作一);减小至常规迎角进入俯冲并改出(基本动作三之逆过程)。

(a) 大迎角稳态飞行

(b) 大迎角绕速度矢滚转
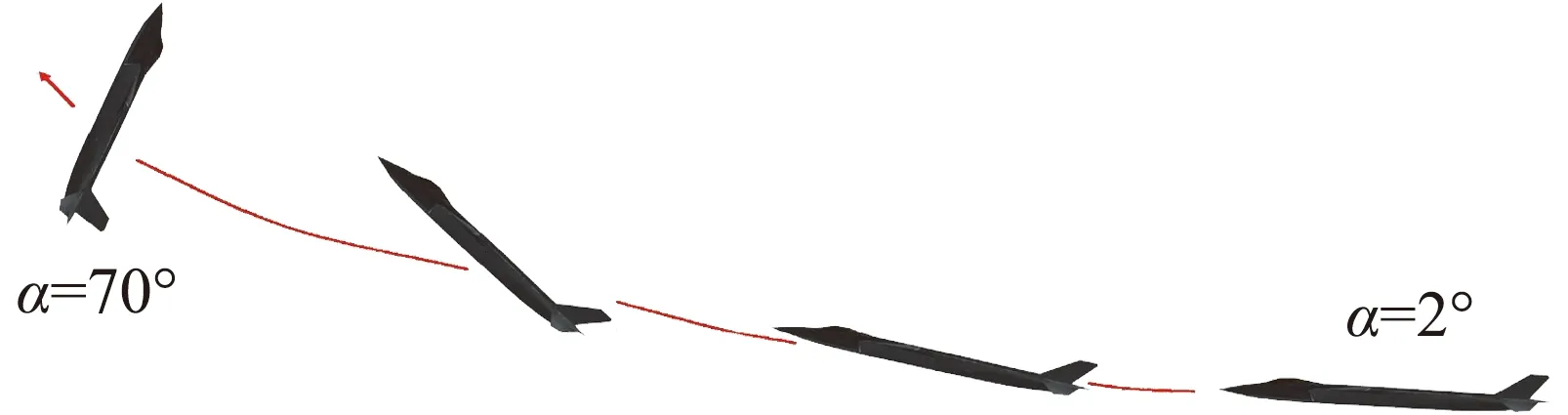
(c) 大迎角动态进入
基于低速风洞大迎角静态、单自由度及多自由度动态试验数据,三个基本动作的气动力建模包括以下部分:
(1) 静态大迎角数据;
(2) 单自由度(俯仰、偏航、滚转方向)动导数效应;
(3) 大迎角下锥运动气动特性;
(4) 单自由度(俯仰、滚转方向)动态气动特性;
(5) 多自由度耦合动态气动特性。
从工程应用角度,目前比较常用的仍是基于自由度和非定常效应叠加的气动力数学模型,即对于气动系数Ci,有:

+ΔCi,rot(α,β,ωss)+ΔCi,unst[α(ξ),β(ξ)]
(1)
其中,右端第1项Ci,st是静态气动力;第2项中的Cip,att、Ciq,att、Cir,att是附着流动导数,在小迎角下等于常规的小振幅振荡动导数,在大迎角下可由不同频率下的小振幅振荡动导数辨识得到;第3项ΔCi,rot为绕速度矢旋转产生的气动力增量,其由旋转天平试验获得,主要用于描述大迎角下绕速度矢滚转机动的气动特性;第4项Ci,unst表示非定常气动力增量,它需考虑流动的历史效应,是迎角和侧滑角时间历程的非线性泛函。α为迎角,β为侧滑角,δ为舵偏角矢量,分别为飞机体轴系下的无因次三轴角速率,ωss为绕速度矢旋转角速率,ξ[0,t]。
在对三个基本动作都建立相应气动模型后,基于自由度叠加思想,可以用一个统一的气动力模型来对三个基本动作进行描述。对于由基本动作组合而成的复杂过失速机动,主要需要考虑相互衔接过程的非定常效应以及自由度之间的非线性耦合效应,可以采用CFD数值计算[42]和风洞实验进行分析,对气动力数学模型做进一步改进完善。图4比较了时长3 s眼镜蛇机动的俯仰力矩系数建模结果与风洞试验结果,从图中可以看到建模结果能够较好地反映试验获得的气动力变化规律。

图4 眼镜蛇机动俯仰力矩系数建模结果与试验结果对比图Fig.4 The modeling and experiment results of the pitch moment coefficient for the Cobra maneuver
气动中心研究了非线性微分方程模型、前馈型RBF神经网络模型、反馈型循环神经网络、最小二乘支持向量机(LS-SVM)等非线性非定常气动力建模方法,探讨了不同建模方法的应用特点。总体上看,这几种方法均具有普适通用性,能够适用于不同气动布局形式的先进战斗机非定常气动力建模。同时,相关研究也表明智能建模方法为气动建模提供了一种更为通用的模式,具有更好描述非定常气动特性的潜力[24]。
3.2 大迎角宽量程气流系参数测量技术
模型飞行试验中,高精度的飞行迎角、侧滑角、空速等测量数据不仅是飞行控制所需重要状态参数,也是试验后气动参数辨识的关键数据。
在常规迎角范围,通常采用五孔探针或风标以及空速管对迎角、侧滑角和空速进行测量。但五孔探针只能适用于不大于30°迎角/侧滑角范围的精确测量,常规风标在较大迎角时对侧滑角测量结果亦可能有较大误差。
为此,发展了大迎角宽量程气流系参数组合测量技术,即30°迎角范围以内飞行采用五孔探针进行测量,大于30°迎角飞行状态采用基于角度预置的风标式气流系参数测量系统(图5)。这样组合使用可以满足过失速机动飞行试验测量及控制需求[25]。
大迎角宽量程气流系参数测量系统研制中注重了小型化以及结构强度、刚度、阻尼特性等的优化设计,以提高其动态特性,减小传感器对试验模型气动特性的影响。
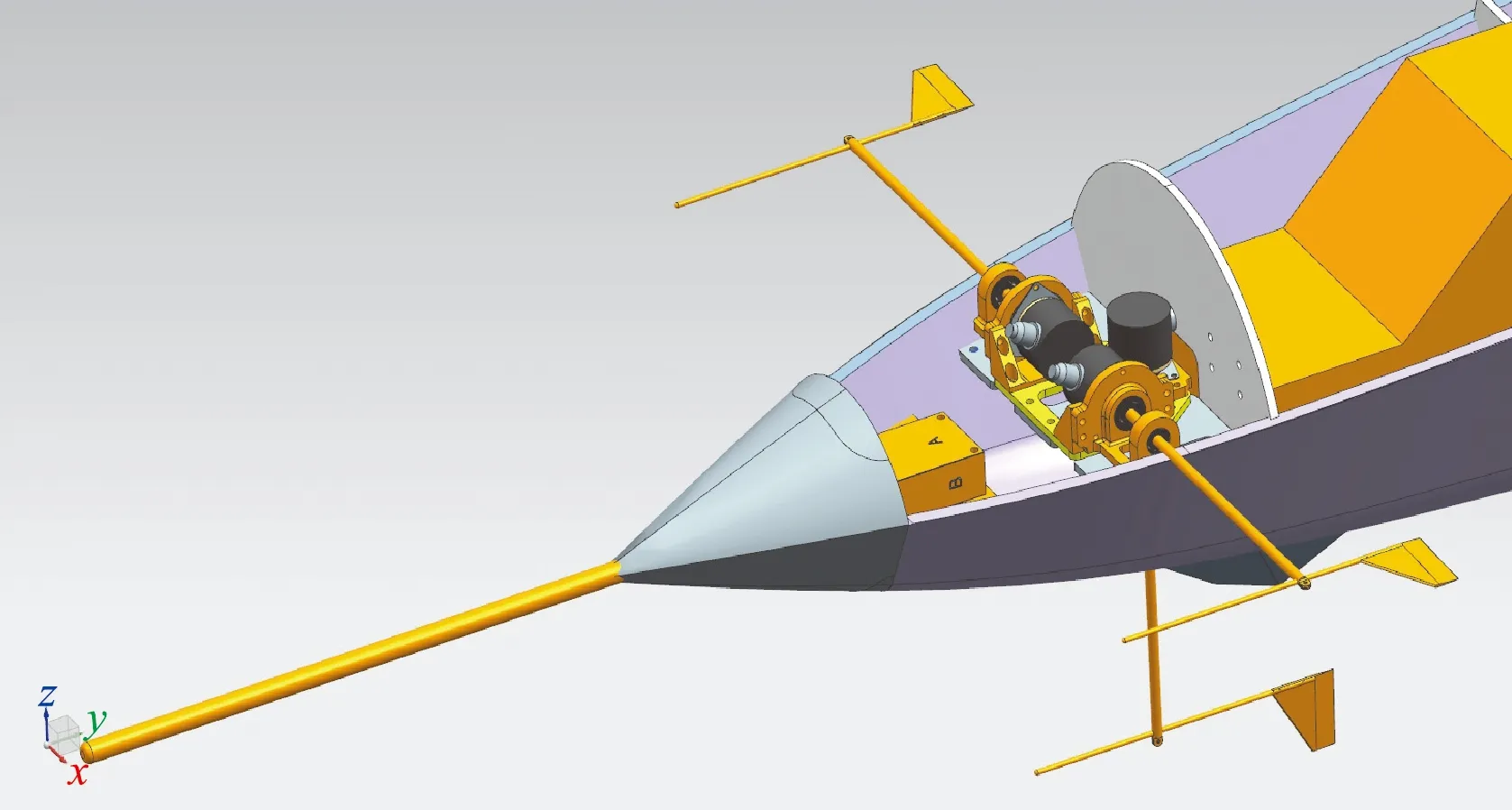
图5 带飞试验风标和五孔探针布置图Fig.5 Sketch of the wind vane and five-hole probe for the model flight test
利用带气流系参数测量系统的试验模型(或局部模型)风洞试验对测量系统进行了标定。
通过模型飞行试验对风标式气流系参数测量系统进行了验证。对于在30°迎角范围以内的常规飞行,比对五孔探针与风标的测量结果,两者的测量值与动态响应特性相当。进一步,通过大迎角飞行试验考察大迎角测量效果,如图6所示,图中Alpha FHP为五孔探针测量值,Alpha WL与Alpha WR分别代表左、右风标测量值。在飞行试验中,模型从8°迎角一直拉起至失速迎角。从图中可以看到,在大于30°迎角后,由于五孔探针头部出现严重的流动分离,五孔探针数据解算出现不稳定现象,测量结果出现较大偏差,而此时左右风标的测量结果均较好的反映了迎角、侧滑角的变化规律,其可以作为飞行控制的输入参数,并用于气动力参数辨识。
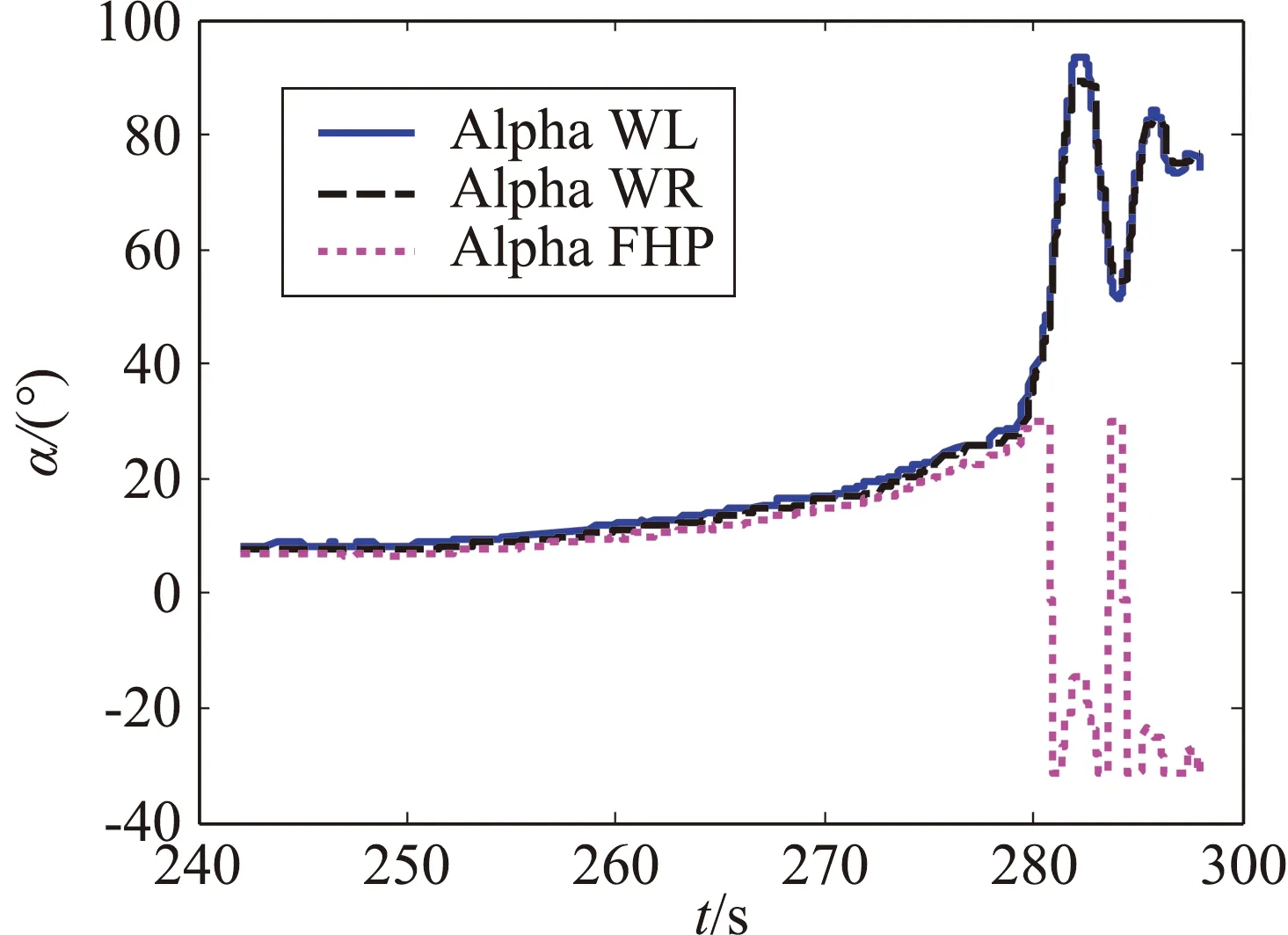
图6 大迎角下迎角测量值Fig.6 Measurement of angle of attack (AoA) in high AoA flight
3.3 非线性控制方法及过失速机动控制律设计
过失速机动飞行动力学特性涉及大范围非线性、非定常气动力以及运动、惯性强耦合等问题,并且模型缩比后,按照相似律其运动和控制频率更高,以配平状态小扰动线性化和线性控制理论为基础的传统飞行控制方法很难实现对试验模型的有效控制。由于大迎角飞行时气动舵面操纵效率急剧下降,过失速机动还须采用推力矢量与气动舵面的复合控制措施[43]。
针对过失速机动中飞机非线性特征明显,气动参数变化范围及地面试验数据不确定度大等特点,结合非线性飞行控制理论的发展成果[44-48],提出了基于动态逆(Dynamic Inversion, DI)和扩张状态观测器(Extended State Observer, ESO)[49]方法、基于动态逆和变结构控制(Variable Structure Control, VSC)方法[27]以及基于改进动态面(Improved Dynamic Surface, IDS)控制方法[30]三种过失速机动控制律设计方法。
3.3.1 基于动态逆和扩张状态观测器方法(ESO+DI)的过失速机动控制律设计

对慢回路和快回路分别采用动态逆方法设计控制器。由于动态逆方法对被控对象数学模型的准确性依赖较强,快回路控制器设计中引入不依赖于模型的扩张状态观测器进行状态反馈和建模误差估计,具体通过将飞机三轴角速率作为观测量,估计作用在飞机三轴上的力矩,从而削弱建模误差影响,然后再求解控制力矩指令。
得到控制力矩指令后,需要将其分配到相应作动器予以实现。气动舵面与推力矢量的分配方法采用链式分配方法,即首先采用气动舵面,如果气动舵面不能完全实现期望指令力矩时,再采用推力矢量作为辅助操纵弥补气动舵面操纵能力的不足。
3.3.2 基于动态逆和变结构控制方法(VSC+DI)的过失速机动控制律设计

慢回路控制律设计采用传统的动态逆方法。对于快回路,为消除作动器动态响应引起的控制滞后,控制律设计中考虑作动器模型,具体实现方案采用滑模变结构控制技术。滑模控制方法在离散控制、控制时延与测量误差等因素综合作用下控制指令容易发生抖振,采用设置滑模边界层和引入控制指令滤波环节等手段对该问题加以处理。
在该控制律设计方法中,气动舵面与推力矢量的分配采用联动分配方法,即同时使用气动舵面和推力矢量,这种方式逻辑相对简单,并且有利于最大程度地利用飞机的控制能力。
3.3.3 基于改进动态面控制方法(IDS)的过失速机动控制律设计
对于基于时标分离原理的动态逆类方法,快回路增益足够大才能在理论上保证闭环控制系统的稳定性,但受制于舵回路性能,其不能任意取大。为保证控制系统的理论稳定性,发展了一种改进动态面飞行控制律设计方法。包括作动器动力学模型的被控对象为3阶系统,该方法首先针对前2阶子系统推导动态面控制律,然后综合全系统并考虑控制约束导出滑模控制律。在一定假设条件下,该控制律可以从理论上保证闭环控制系统为输入-状态稳定。
3.3.4 过失速机动控制律仿真验证
利用某模型飞机数据对所设计的三种过失速机动控制律进行仿真验证。
首先开展“眼镜蛇”机动仿真验证。图7与图8分别给出了上述三种控制律完成“眼镜蛇”机动的迎角与俯仰角速率仿真结果,从图中可以看到三种控制律的控制效果比较一致,都能很好实现指令迎角。
图7 眼镜蛇机动仿真迎角结果Fig.7 AoA in Cobra maneuver simulation
进一步开展“Herbst”机动仿真验证。图9给出了采用上述三种控制律实现“Herbst”机动的迎角曲线,图10给出了飞机在三维空间的机动航迹,可以看到三种控制律均有效实现了对“Herbst”机动的控制。

图8 眼镜蛇机动仿真俯仰角速率结果Fig.8 Pitch rate in Cobra maneuver simulation
图9 Herbst机动仿真迎角结果Fig.9 AoA in Herbst maneuver simulation
图10 Herbst机动仿真三维航迹结果Fig.10 The three-dimentional trajectories of Herbst maneuver simulation
通过典型过失速机动仿真对控制律控制效果进行验证后,还需要对控制律的鲁棒性进行考核。针对典型过失速机动进行了组合拉偏仿真及蒙特卡罗仿真,考虑的偏差因素包括质量偏差、惯量偏差、气动模型偏差、发动机推力偏差以及作动器时延与间隙等。仿真研究表明三种控制律均能较好完成过失速机动飞行控制,具有满意的鲁棒性。
3.4 推力矢量控制系统
设计和研制了机械式推力矢量装置实现推力矢量控制,为过失速机动飞行提供附加的俯仰及偏航控制力矩。推力矢量装置由固定环、俯仰环及其转轴、偏航环及其转轴、俯仰和偏航方向控制机构(含操纵机构和舵机)等部件构成,结构示意图见图11。通过综合考虑尾喷管几何形状、发动机尾焰流场特性以及尾喷管作动器机械结构,开展了流固耦合分析以及迭代优化设计,得到俯仰偏航运动耦合小、线性度高的柔性双环结构尾喷管。研制的推力矢量系统俯仰偏转角度范围为±15°,偏航偏转角度范围为±12°。

图11 推力矢量装置结构示意图Fig.11 Structural sketch of the thrust vectoring instrument
利用小型涡喷发动机地面测试台开展推力矢量系统测试与建模(图12),对推力矢量偏转时三轴力及力矩进行测量,得到推力矢量系统俯仰转角、偏航转角、转速与矢量力/力矩之间的关系函数,为推力矢量系统建模以及过失速机动飞行控制律设计提供了有效数据支撑。地面测试台试验结果显示,推力矢量系统提供的俯仰、偏航控制力矩结合气动舵面的作用能够满足过失速机动控制需求。
图12 推力矢量力矩测试结果Fig.12 Test results for the thrust vectoring moment
3.5 大迎角非定常气动参数辨识
开展模型飞行试验大迎角非定常气动参数辨识研究,图13给出了辨识流程。通过试验设计并开展模型飞行试验获取飞行器大迎角飞行数据后,首先进行数据预处理,包括时统、传感器校准、跳点剔除与补正、传感器安装位置和安装方位校正等;然后采用最大似然法或扩展Kalman滤波类方法进行数据相容性检验,辨识传感器的系统误差,并根据辨识结果进行航迹重建;最后采用最大似然法或最小二乘法进行大迎角非定常气动参数辨识。
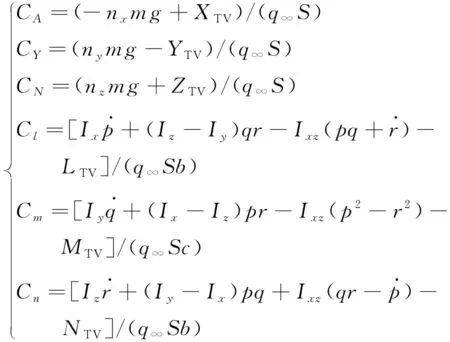
由于目前国内尚无高精度角加速率传感器,六分量气动力和力矩系数辨识中的角加速率信息需通过角速率数值微分得到。工程实践表明,对于飞行试验数据,最优Fourier平滑算法[50]是一种十分有效的数据平滑和微分算法。根据过载和角加速率计算六分量气动系数:

图13 大迎角非定常气动力参数辨识流程Fig.13 Diagram of high AoA unsteady aerodynamic parameter identification
(2)
其中,下标“TV”表示矢量发动机产生的体轴系力和力矩。
对“眼镜蛇”机动模型飞行试验数据进行了法向力系数时间历程的初步辨识研究(图14),与利用风洞试验数据建立的非线性非定常气动力模型相比,两者规律比较一致,反映了非定常迟滞效应的特点。
目前,针对过失速机动飞行试验数据进行非线性非定常气动模型参数辨识尚有一定困难,特别是针对气动力矩参数的辨识。究其主要原因,一是推力矢量系统虽然在发动机地面测试台进行了测试与建模,但在飞行条件下的实际推力特性(包括了进气道、尾喷管及飞行速度、高度等影响)与地面测试结果有一定差别,且影响量未知,特别是推力矢量的控制力矩偏差会对气动力矩的辨识带来较大影响;二是大迎角飞行时空速管动压测量值相比常规迎角飞行也存在较大误差。如何准确的估计发动机实际推力特性并在气动参数辨识中予以扣除,及准确估计大迎角下的飞行动压以提高气动参数辨识准确度,是下一步研究中需要探索解决的重要问题,可行的技术途径包括对飞行中发动机实际推力特性进行准确建模、提高推力矢量喷管偏角测量精度以及发展新型的动压测量估计技术。
(a) α~t

(b) CN~α
4 典型过失速机动模型飞行试验
利用某先进战斗机构型缩比模型,采用基于动态逆和扩张状态观测器的过失速机动控制律,完成了“眼镜蛇”机动、大迎角稳态飞行、大迎角下绕速度矢滚转以及“Herbst”机动等典型过失速机动飞行试验。
飞行试验过程为:试验模型滑跑、起飞、爬升、巡航至1300 m场高的试验空域,以速度55 m/s的水平直线飞行状态按照设计的控制律进入过失速机动,完成试验后,模型自主返航着陆。
4.1 “眼镜蛇”机动
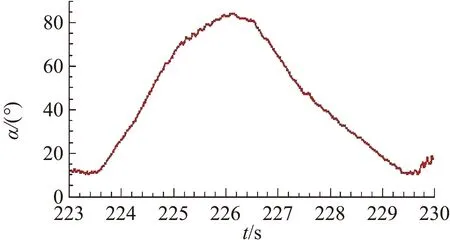
进入试验空域后,按照预定控制策略,试验模型迅速拉迎角至大迎角过失速状态(最大迎角约85°),随后压机头,模型退出大迎角失速状态,转入正常飞行。机动过程中模型平稳失速、过失速,无明显偏离和振荡现象。图15与图16分别给出了“眼镜蛇”机动过程中的迎角与俯仰角速率曲线。
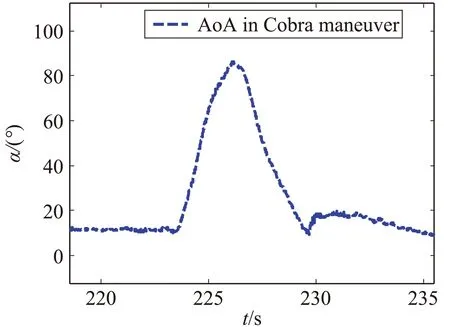
图15 眼镜蛇机动模型飞行试验迎角结果Fig.15 AoA in Cobra maneuver modeling flight test
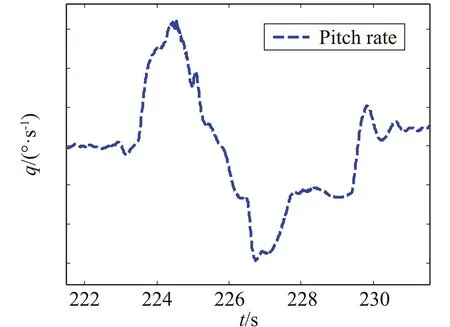
图16 眼镜蛇机动模型飞行试验俯仰角速率结果Fig.16 Pitch rate in Cobra maneuver modeling flight test
4.2 大迎角稳态飞行
进入试验空域后,按照预定控制策略,试验模型拉大迎角,达到最大迎角(约90°)后,维持大迎角稳态飞行一段时间(平均迎角约78°),随后模型退出大迎角状态转入正常飞行。机动过程中模型平稳失速、过失速,无明显偏离和振荡现象。图17与图18分别给出了飞行器进入、保持与退出大迎角稳态飞行过程的迎角与俯仰角速率曲线。
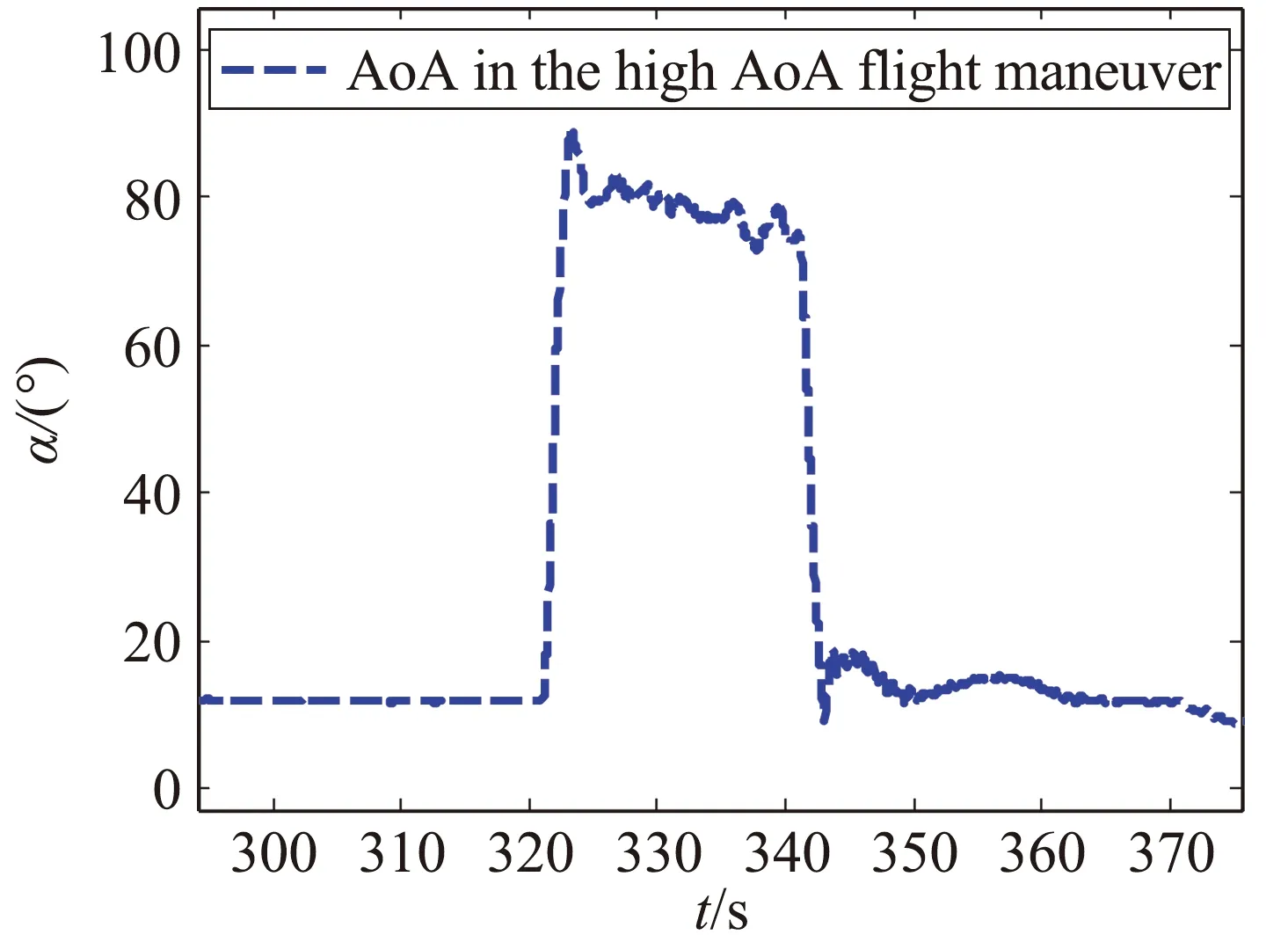
图17 大迎角飞行模型飞行试验迎角结果Fig.17 AoA in high AoA flight maneuver modeling flight test
4.3 大迎角下绕速度矢滚转
进入试验空域后,按预定控制策略,试验模型拉大迎角(最大迎角约96°),完成绕速度矢量360°滚转,随后,模型退出大迎角状态转入正常飞行。图19给出了大迎角下飞机绕速度矢滚转机动过程中的迎角曲线,图20给出了机动过程中的飞机滚转角曲线。

图18 大迎角飞行模型飞行试验俯仰角速率结果Fig.18 Pitch rate in high AoA flight maneuver modeling flight test
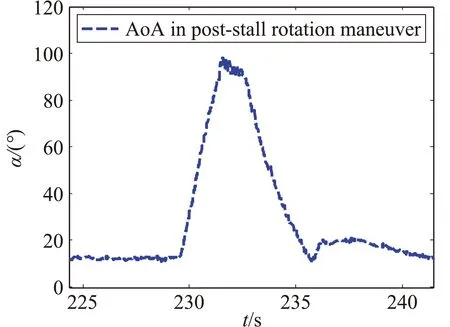
图19 绕速度矢滚转模型飞行试验迎角结果Fig.19 AoA in post-stall rotation maneuver modeling flight test
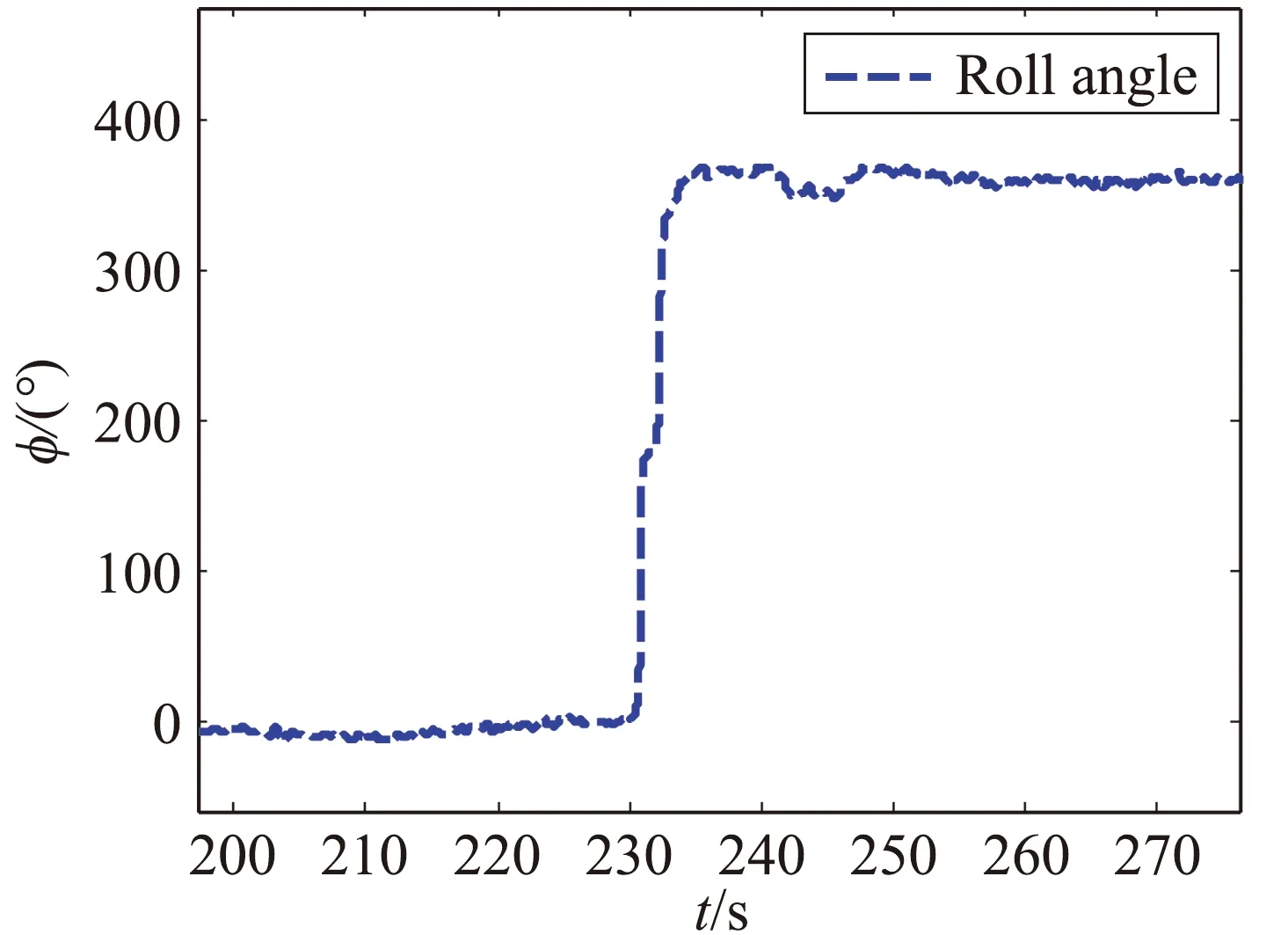
图20 绕速度矢滚转模型飞行试验滚转角结果Fig.20 Roll angle in post-stall rotation maneuver modeling flight test
4.4 Herbst机动
进入试验空域后,按照预定控制策略,试验模型拉大迎角,达到最大迎角(约78°)后,利用偏航推力矢量改变机头指向,使模型绕速度矢滚转,机头迅速调转180°,过程中伴随短暂的尾冲(气流从机尾吹向机头),调转机头后模型加速并退出大迎角失速状态,反向正常飞行,完成“Herbst”机动动作。图21给出了“Herbst”机动过程中的迎角曲线,图22给出了机动过程中试验模型的三维航迹。

图21 Herbst机动模型飞行试验迎角结果Fig.21 AoA in Herbst maneuver modeling flight test
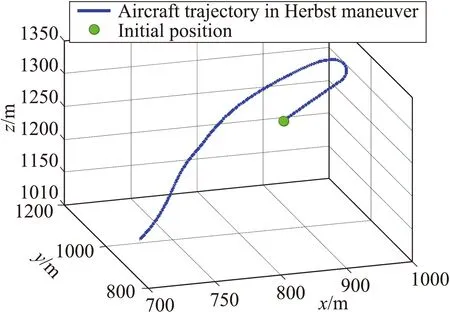
图22 Herbst机动模型飞行试验三维航迹结果Fig.22 The three-dimensional trajectory in Herbst maneuver modeling flight test
从以上飞行试验结果可以看出,发展的基于动态逆的非线性控制方法,结合气动舵面/推力矢量控制律设计,能够实现先进战斗机构型典型过失速机动飞行的有效控制。
5 结 论
基于中国空气动力研究与发展中心建立的航空飞行器带动力自主控制模型飞行试验平台,研究发展了大迎角非定常气动力建模方法、大迎角宽量程气流系参数测量、非线性控制方法及控制律设计、推力矢量控制系统、大迎角非定常气动参数辨识等关键技术,在国内首次完成了先进战斗机构型缩比模型典型过失速机动飞行,可为先进战斗机开展真机过失速机动飞行试验以及形成过失速机动能力提供重要技术支撑。
致谢:诚挚感谢中国航空研究院郑遂先生,成都飞机设计研究所杨朝旭先生、蔡广平先生、文立红先生、袁兵先生、展京霞女士等的大力支持和帮助!
