微纳操纵成像系统的微分前馈自抗扰控制研究
2020-03-12吴文鹏赵庆旭王一帆
吴文鹏,赵庆旭,王一帆,胡 贞
(长春理工大学 电子信息工程学院,吉林 长春 130022)
0 引言
微纳操纵成像系统为研究微观世界打开了一扇窗户,是科学界的一次重要的飞跃。其主要利用系统中的探针与被测样品之间的原子力来检测样品形貌,将力的变化变为光斑位置的变化,再转变为电压的变化值用于成像。微纳操纵系统操作要求在超静环境下进行,因为它易受到系统本身的扰动和外界噪声的影响,如在扫描时,人的走动都会影响成像质量。因此,寻找合适的控制算法来提高系统的鲁棒抗干扰能力很有必要。
目前商用的微纳操纵成像系统一般采用比例积分(PI)控制算法,但PI控制器本身存在控制精度低,鲁棒性差,带宽低等问题,在面对干扰时,PI控制总是被动地做出反应,导致成像质量差[1];同时遇到不规律纵向较深等样品时,系统所需要的稳态时间太长,导致扫描速度慢。因此,国内外许多学者对系统的控制算法展开研究。如Osamah M.提出了一种自适应的原子力显微镜成像方法,来提高系统的自动化程度[2]。周娴玮提出将继电反馈的PI控制参数整定方法运用到原子力显微镜系统中,用于解决系统PI 参数难整定的问题[3]。王艳艳建立z轴仿真模型,再将鲁棒自适应算法加入系统进行仿真,验证了算法控制精度和鲁棒性[4]。李丹等将迭代学习应用于系统横向扫描定位[5],有效提高了成像质量。
本文利用线性自抗扰控制器,参数只需要调节双带宽的优点[6],将模型信息加入系统中,并针对传统自抗扰控制在高频周期信号下始终存在误差的问题,提出将微分前馈引入系统来消除误差,提高控制性能。仿真实验证明了该方法的有效性。
1 系统数学模型
1.1 系统原理及结构
微纳操纵系统的工作原理是用探针架将对微弱力非常敏感的微悬臂的一端固定[7],在微悬臂的另一端装上微纳级的探针,当探针的针尖与被测样品接触时,样品与针尖原子间产生极微弱的范德华力,从而使微悬臂发生形变。当激光器将光发射到微悬臂上时,经过反射,形变量被四象限光斑检测器检测到,同时AD采集卡将数据传送到上位机中。在扫描过程中,压电陶瓷扫描器带动样品运动,检测样品表面的形貌用于成像。系统结构图如图1所示。

图1 微纳操纵系统结构图
1.2 数学模型
由图1可见,微纳操纵成像系统由多模块组成,我们难以直接对其建立数学模型,需要分别对各模块进行机理建模和数据辨识建模。图2为系统数学模型框图。对压电陶瓷位移系统、微悬臂及四象限光斑系统建立数学模型,最后组成整体的数学模型。在微纳操纵成像系统中,计算机控制器的作用是计算出合适的控制量,使扫描过程中样品与探针尖端的间距保持恒定,即保持针尖与样品间的电压值恒定。

图2 系统数学模型框图
压电陶瓷位移扫描平台作为微纳操纵成像系统的执行机构,我们无法进行机理建模,需要对其输入一个阶跃信号,得出输出波形,在MATLAB中进行模型辨识。四象限光斑检测系统,利用电压值随光斑位置变化,采集数据进行函数拟合,而微悬臂可以采用机理建模的方法。本文直接引用文献[8]中的模型,传递函数重写如下:
G(s)=G1(s)·G2(s)=
(1)
2 算法设计
2.1 基于模型的线性自抗扰控制器设计
在得到系统模型信息后,设计基于模型信息的线性自抗扰控制器(MLADRC),这样观测器不必浪费带宽来估计该部分已知信息,可充分利用带宽来估计未知的扰动,从而提高控制器的跟踪精度和时间,提高控制性能[9]。线性自抗扰控制器框图如图3所示。图中,R(t)为系统的输入量,Y(t)为输出量,z1、z2、z3为观测器状态量,u0为线性反馈环节的输出信号。

图3 模型信息线性自抗扰控制器框图
2.1.1 基于模型信息的观测器设计
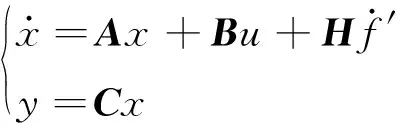
将式(1)写成微分方程的形式为

995 973.156u+w
(2)
式中:y和u分别为系统的输出、输入信号;w为未知的外部扰动。将式(2)改成:
(995 973.156-b0)u+b0u+w
(3)
式中b0为输入增益的近似估计。
(4)
其连续状态空间描述为
(5)
其中各状态量为

(6)
(7)

(8)

(9)
综上所述可知,基于模型信息的线性状态观测器表达式为
(10)
增益矩阵为
(11)
根据极点配置方法求出观测器的带宽ω0,从而得出增益矩阵的各状态量。
(12)
2.1.2 线性误差控制率设计
利用基于模型信息的状态观测器对扰动进行估计和补偿,采用比例微分(PD)控制器对系统进行控制。
(13)
利用调优闭环临界阻尼和所需稳定时间Tsettle的方法设置控制参数[10]KP,KD。
(14)
从2.1.1节设计过程可看出,基于模型信息的线性自抗扰控制器与未采用模型信息的线性自抗扰控制器最大的不同是状态观测器加入了被控系统的模型信息[11]。
2.2 微分前馈的自抗扰控制器设计
传统自抗扰控制器设计,给定的参考信号为阶跃信号,使系统在跟踪曲线时误差降低。但当给定高频信号时,即输入正弦信号,自抗扰控制器会使系统始终存在稳态误差,需要重新设计扰动补偿环节,本文引入微分前馈量来消除图4为微分前馈的模型线性自抗扰框图。
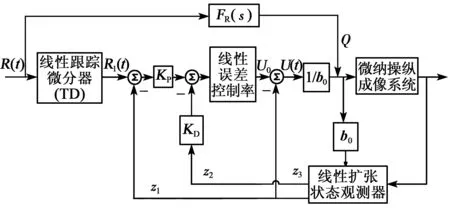
图4 微分前馈的模型信息线性自抗扰框图

(15)
加入微分前馈信号:
(16)
给出微分前馈量为
(17)
由式(17)可看出,微分前馈量包含二阶微分环节s2/b0和一阶微分环节KDs/b0。
3 仿真验证
验证所设计控制器的可行性,在MATLAB/Simulink中搭建控制模型,编写m文件对状态观测器进行控制,对比基于MLADRC和微分前馈的MLADRC控制器在正弦信号下的跟踪曲线和跟踪误差。参数选择b0=995 973.156,ωc=800,ω0=2 400,KP=64×104,KD=1 600,在命令栏输入L1=7 200,L2=1 728×104,L3=13 824×106,Simulink仿真图如图5所示。
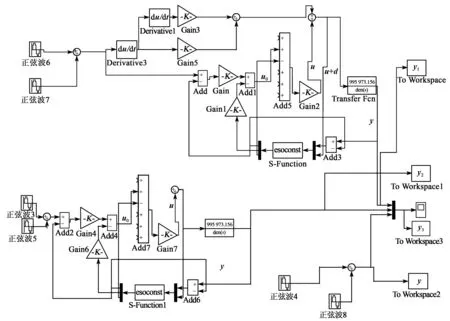
图5 Simulink仿真结构图
首先验证在加入低频信号时的系统响应效果,给入0.1 mV的阶跃信号,如图6所示。由图可见,对比PI控制器0.15 s的响应时间,基于模型信息的LADRC控制器和微分前馈的MLADRC控制器明显快了0.13 s。
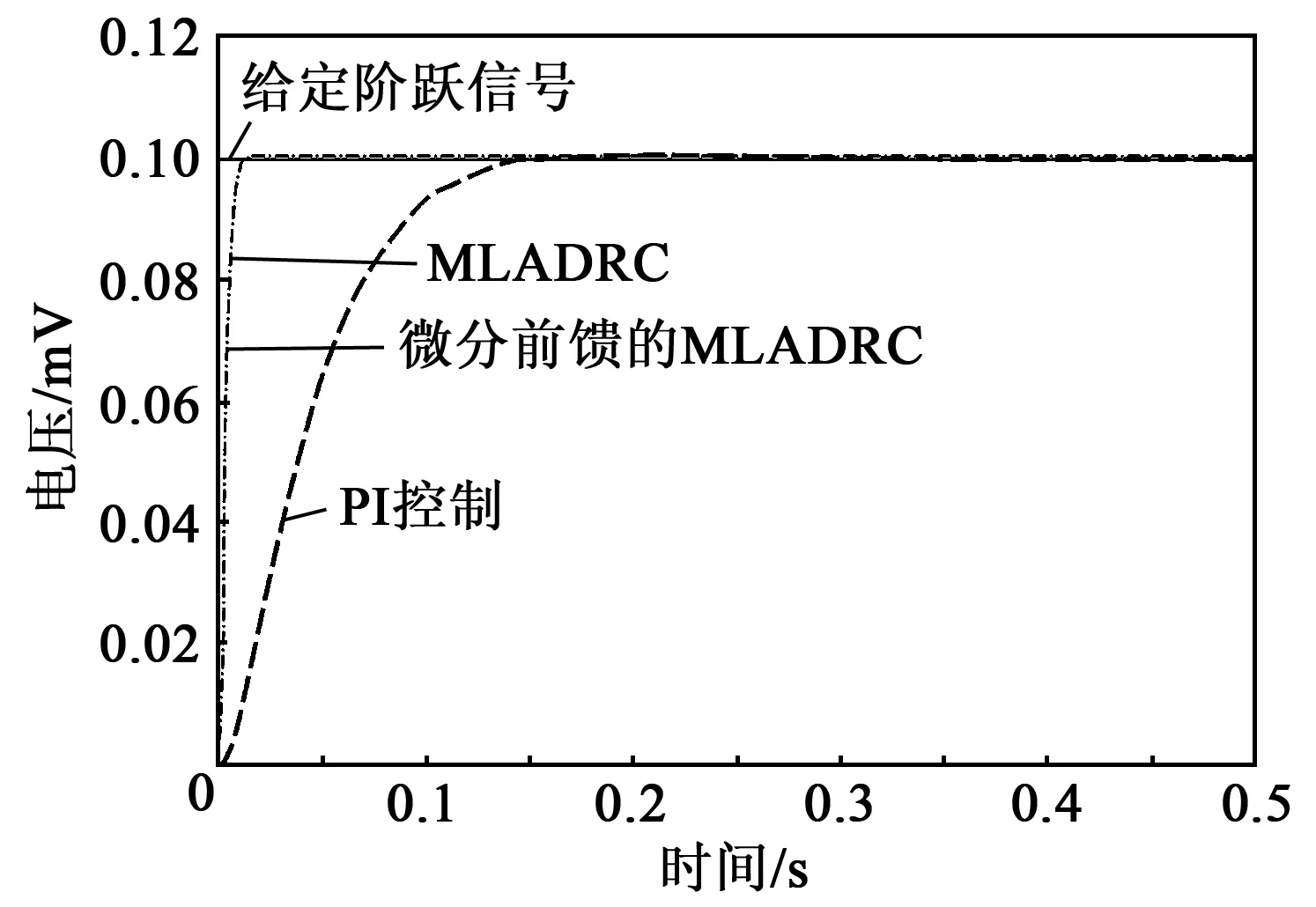
图6 0.1 mV的阶跃信号响应
由图6可见,在低频信号下,MLADRC控制器和微分前馈的MLADRC控制器动态响应曲线基本吻合。为了验证本文在高频信号下,微分前馈的MLADRC控制器理论可以消除跟踪误差,给定峰值1 mV,频率为50 Hz的正弦信号,其跟踪曲线和跟踪误差图如图7所示。
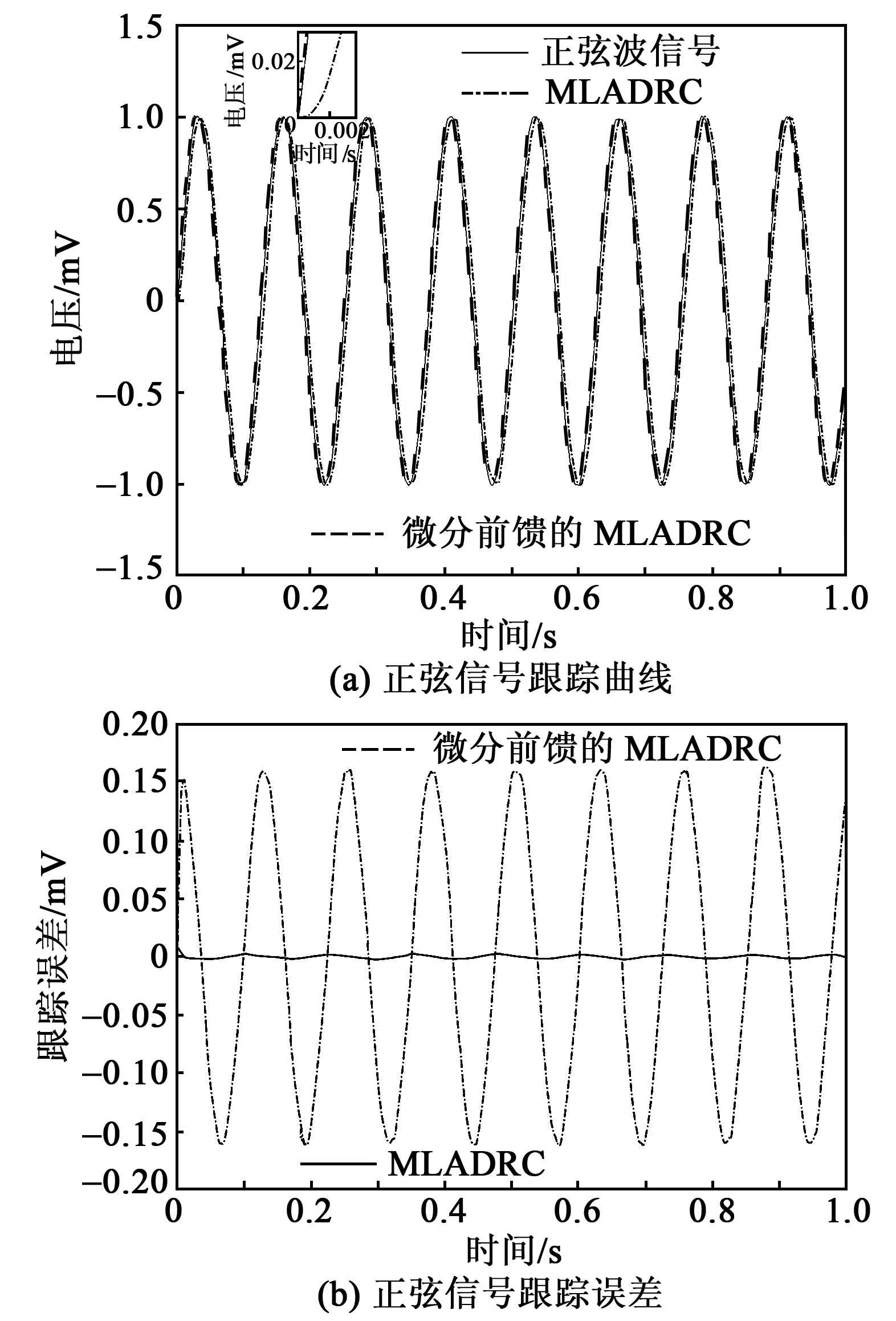
图7 高频正弦波给定控制器控制效果
由图7(b)可见,微分前馈的MLADRC控制器跟踪误差几乎为0,而基于模型信息的LADRC误差达到±15%。为了验证设计的控制器的抗扰能力,在输入端加入峰值0.5 mV,频率为30 Hz的正弦信号,控制器跟踪曲线和跟踪误差曲线图如图8所示。

图8 扰动信号下控制器控制效果
由图8可见,在扰动信号下,设计的微分前馈的MLADRC控制器跟踪误差为0,明显优于基于MLADRC控制器,显示出微分前馈的MLADRC控制器在高频周期信号下具有很好的抗干扰能力。
4 结束语
针对微纳操纵成像系统极易受到系统内部和外部干扰的问题,对所设计的线性自抗扰控制器加以优化,加入模型信息,构建MLADRC控制器;并针对传统自抗扰控制在高频信号下始终存在跟踪误差,设计了微分前馈的MLADRC控制器。在MATLAB/Simulink仿真平台进行仿真,结果验证了在高频信号下,微分前馈的MLADRC控制器能基本消除跟踪误差,并具有较好的鲁棒性,为算法具体应用到系统中提供了依据。
