一种高稳定性压电驱动电源设计
2020-03-12张玉婷张文涛张紫杨
张玉婷,张文涛,钱 存,张紫杨,陈 云
(桂林电子科技大学 广西光电信息处理重点实验室,广西 桂林541004)
0 引言
随着现代科技的飞速发展,微定位技术在各领域的地位愈发重要。纳米级、亚纳米级的定位已成为半导体制造业、航空航天技术、纳米医疗器械等领域的核心技术[1-2]。压电陶瓷促动器作为亚纳米级分辨率的位移装置,具有良好的机械特性与动态特性,广泛应用于微定位系统中[3-4]。压电促动器(PZT)的定位精度与驱动电源性能及其特性相关,研究人员普遍使用压电陶瓷等效静态电容作为负载电容设计驱动电路[5-6]。实际使用中,压电陶瓷等效电容随环境影响及输入电压变化有较大波动,影响驱动电源的稳定性。本文设计了一种适应负载电容量变化的压电陶瓷驱动电源,该研究对微定位系统具有重要的实际意义。
1 驱动电源整体结构
1.1 驱动电源结构框图
驱动电源主要由微处理器、数模转换器(DAC)、线性放大电路等组成,整体结构如图1所示。

图1 驱动电源框图
由图1可知,微处理器发出数字信号,经滤波、整流后线性放大得到压电陶瓷位移控制信号。其中,线性放大电路作为驱动电源的重要组成部分,影响控制信号的精度及电源稳定性。
1.2 线性放大电路
压电陶瓷驱动电源分为电压控制型与电流型控制型,因电流控制型漏电流问题严重,较难控制,故选用电压控制型。电压控制型驱动电路的线性放大部分为电路的核心器件,本文采用高压运放式驱动,其电路图如图2所示。

图2 高压运放电路
图2所示的驱动方式具有芯片集成度高,占用空间小,自激现象低等优势[7]。图中,R0为运放内阻,R1、R2为反馈电阻,电路的电压传输关系为
(1)
2 动态容性负载分析及补偿
2.1 负载容量变化
压电陶瓷的等效静态电容是在微电压、低频率、无负载、常温等理想情况下测得的。其值实际大小会随输入电压及温度的变化而变化[8-9],变化曲线如图3所示。

图3 负载容量变化曲线
由图3可知,在室温条件下,驱动电源在输出电压为120 V以下时,负载电容量变化可达初始值的1.5倍。因此,设计具有良好动态电容负载适应能力的驱动电源尤为重要。
2.2 容性负载对运放的影响
压电陶瓷促动器作为运放的容性负载,与运放内阻组成RC振荡,影响电源系统的稳定[10]。实验采用PA96运算放大器作为线性运放的核心,分析不同电容量负载对运算放大器开环增益的影响,得到的结果如图4所示。
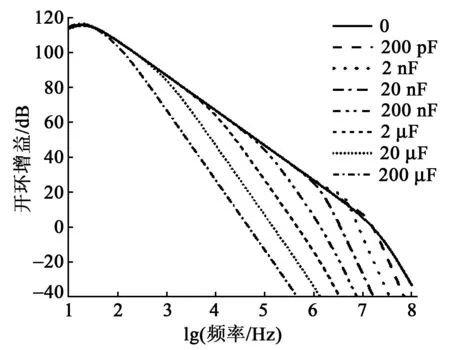
图4 容性负载对开环增益的影响
由图4可知,当负载电容量增大时,运放开环增益曲线所加极点频率变小,减小了运算放大器的带宽,并使系统提前进入截止频率,影响运放电路的整体稳定。
PZT作为位移及动能输出器件,具有纳法至微法级以上的等效电容量,由图4还可知,负载电容量波动对驱动电源稳定性影响较大。本文采用的压电陶瓷静态等效电容为1.5 μF,其所加零点频率为
(2)
式中CL为负载PZT等效电容。此时,系统的开环增益曲线在10.6 kHz点以20倍频速率下降,并以此速率穿越20 dB增益值,引起系统不稳定,应对其补偿。
2.3 动态容性负载补偿电路
针对压电陶瓷等效容量变化的特点,设计了驱动电路结构如图5所示。图中,反馈电阻(Rf)、反馈电容(Cf)、PZT组合为单零点补偿电路。R、C作为前置滤波,祛除电路中的高频谐波,Riso为隔离电阻,采用10 Ω小电阻对输出电压作平滑处理。

图5 优化后电路
由图5可知,该驱动电路具有1个fz与2个极点频率(包括低频极点频率fP1和高频极点频率fP2),则有
(3)
(4)
(5)
将fP1与fz相消,即fz=fP1,可得系统的平衡条件为
RfCf=(R1//R2)CL
(6)
此时,将式(6)代入式(5),系统将产生新极点,新极点频率fP为
(7)
分析式(6)可知,当CL容量发生变化时,驱动电路的稳定性将受到影响,为使驱动电源仍保持动态稳定,需R1//R2≫Rf,Cf≫CL。考虑放大倍数与常用反馈电阻的选择,取R1=10 kΩ、R2=90 kΩ、Rf=100 Ω,CL=1.5 μF,代入式(6),得Cf=135 μF,fP=10.7 kHz。
已知负载等效静态容量为1.5 μF,取其1.5倍的电容值2.25 μF,代入式(4),容量变化引起fP1变化,fP1的值由11.789 Hz变为11.725 Hz,变化量为0.5%,系统平衡条件基本不变,则新极点频率fP维持在10.7 kHz。
3 线性放大电源电路
3.1 线性放大电路
驱动电源的线性放大电路采用双极放大结构,整体电路图如图6所示。
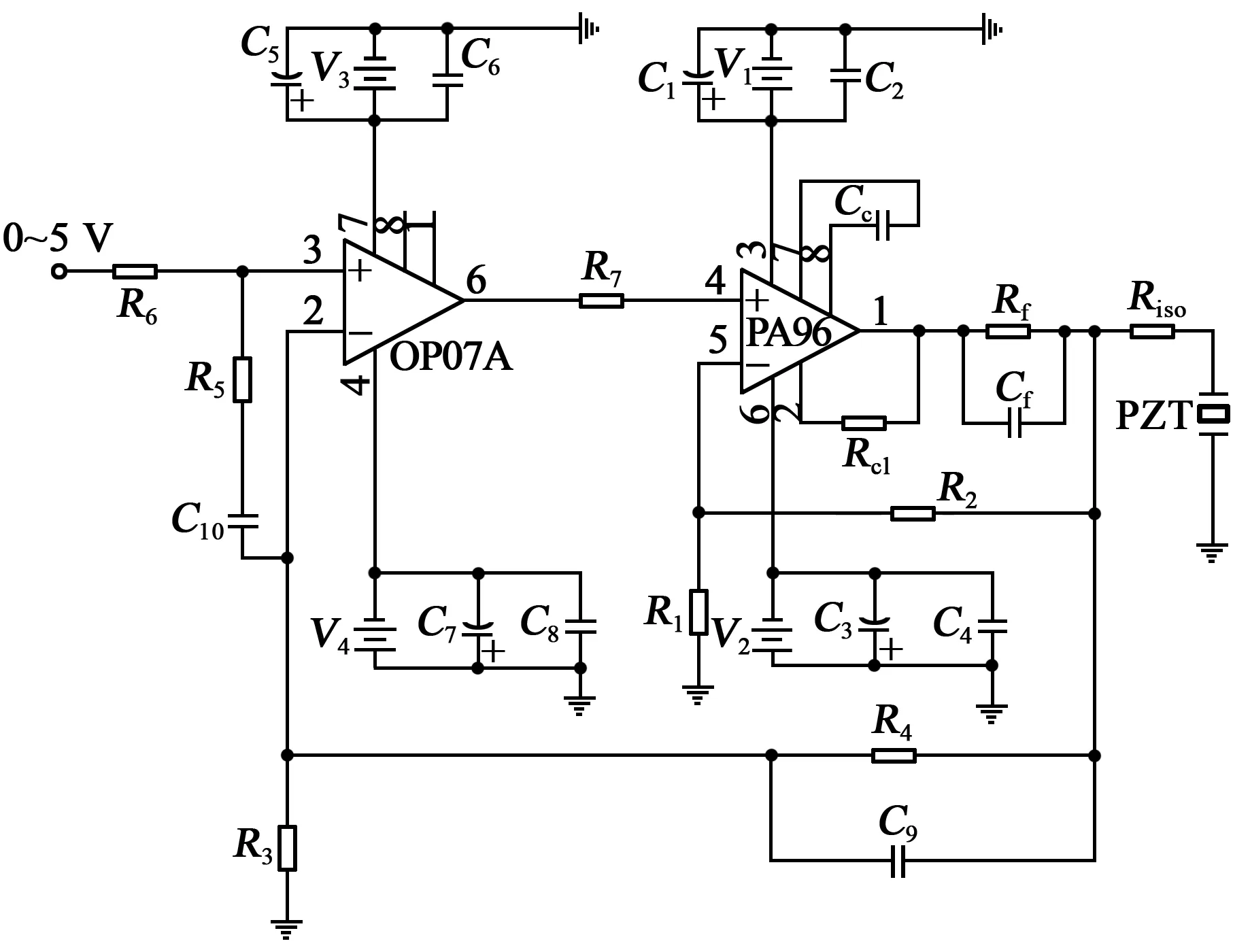
图6 线性放大电路
由图6可知,线性放大电路中,前置放电选用OP07A高精度放大器减小系统的失调电压[7]。R1、R2、R3、R4为反馈电阻,选择合适的阻值,实现前置放大1倍,运算放大10倍的线性放大。C9为调整电容,可改善环路的稳定性。
3.2 相位补偿及限流
运算放大器的相位补偿采用纯电容补偿方式,其值由闭环增益确定。已知运放的放大倍数A=10,则其闭环增益为
Gain=20lgA=20(dB)
(8)
查PA96手册,选用22 pF电容作相位补偿。
高压运放电路需对输出电流进行限制,运放输出电流限制采用限流电阻Rcl,考虑最大输出电流:
Im=2πUmfmCL=0.94(A)
(9)
式中Um、fm分别为驱动电源的最大电压、频率。则Rcl为
(10)
4 电源性能测试
4.1 阶跃响应分析
对驱动电源进行阶跃响应测试,输入端采用5 V阶跃电压信号,CL由1.5 μF增至4 μF,每次增加0.5 μF,得到驱动电源的输出电压阶跃响应曲线如图7所示。

图7 驱动电源的输出电压阶跃响应曲线
由图7可知,当CL=1.5 μF时,系统的驱动电源输出电压阶跃信号在0.2 ms内平滑上升至100 V,且无超调量。当CL逐渐加大时,系统的阶跃响应时间变长,信号质量良好。考虑驱动电源使用频率为1 kHz,当阶跃时间为半个周期即0.5 ms时,负载容量为临界值4 μF,即驱动电源在CL为0~4 μF时,均具有良好的阶跃响应。
4.2 动态跟随分析
在1 kHz使用频率时,系统的动态稳定性也尤为重要,可分析驱动电源动态跟随效果。输入信号采用幅值2.5 V,正向偏置电压2.5 V的1 kHz正弦信号,得输出电压信号如图8所示。

图8 动态跟随曲线
由图8可知,在CL为1.5~3.5 μF变化时,系统输出电压信号跟随效果良好,电压曲线为正弦信号。而当CL=4.5 μF时,系统的输出电压曲线第二峰值缺压,无法达到额定输出值。所以,驱动电源在CL为0~3.5 μF时,具有良好的动态响应。
4.3 误差分析
对驱动电源进行线性误差分析,经多次测量得系统的线性误差与CL大小无关,误差测量结果如图9所示。
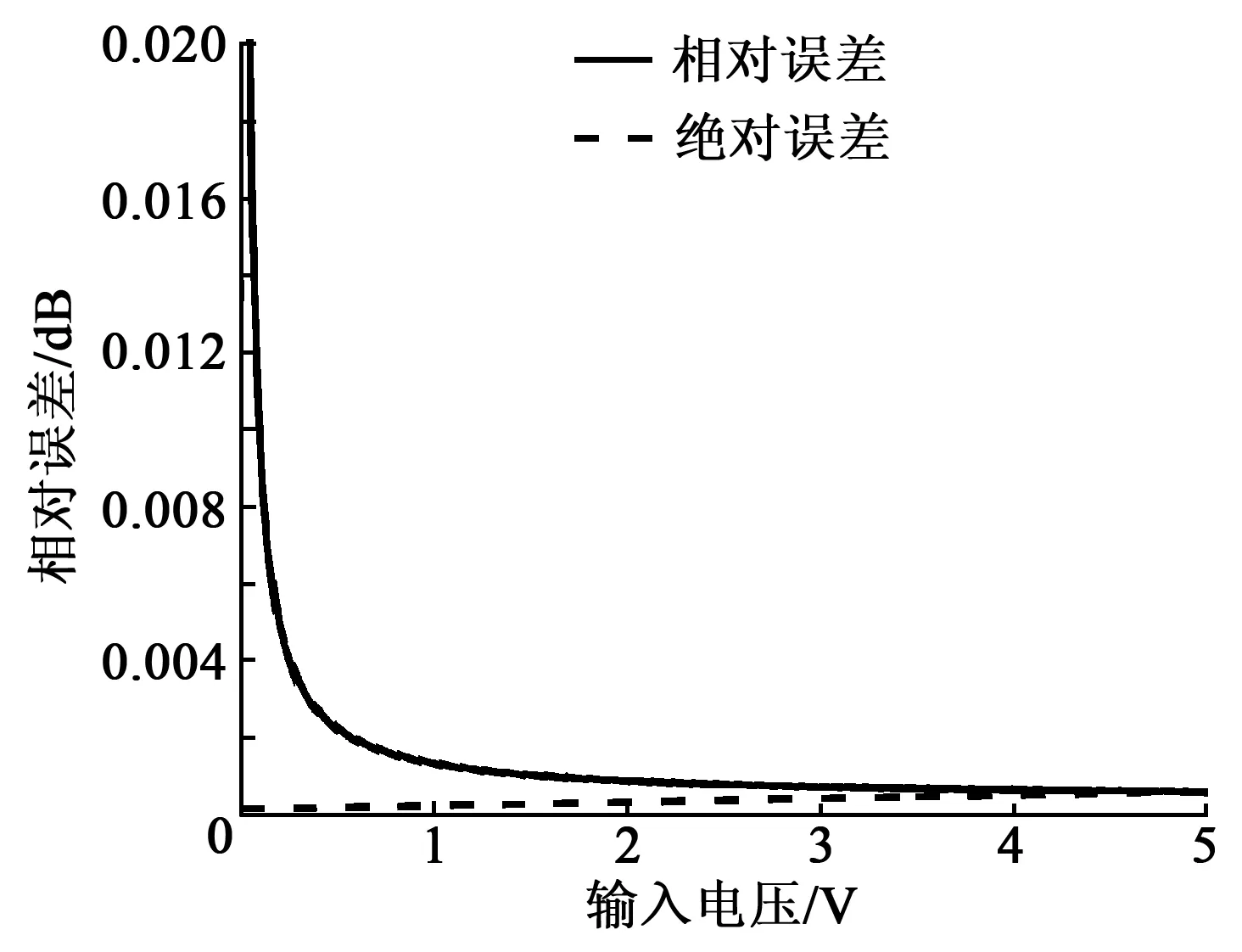
图9 线性误差
由图9可知,驱动电源在0~100 V时,其输出相对误差在0.02%以下,且线性误差在0.7 mV以下,具有较高的线性度与可信度。
5 结束语
本文首次提出了一种适用于变电容负载的驱动电路,动态容性负载对电源稳定性进行分析。通过验证电路性能,表明该驱动电路的电容量适用于0~3.5 μF,大于设计需求范围(0~2.25 μF),为压电陶瓷驱动提供了新思路。
