基于快速谱峭度的冲击能量法在水轮机空化评价中的应用研究
2020-03-12林家洋张民威苏疆东王振鑫
林家洋,张民威,苏疆东,刘 艺,王振鑫
(1.福建水口发电集团有限公司,福建福州350004; 2.北京中元瑞讯科技有限公司,北京100085)
0 引 言
水轮机转轮流道内及其过流部件的局部表面,经常会发生空化而后引起轻微的空蚀,并在表面产生少量蚀点,进而会形成蜂窝状的空蚀,甚至有的会使叶片穿孔或掉边,会严重威胁到机组的安全运行[1]。空蚀空化是导致水轮机运行效率下降、结构破坏以及使机组寿命缩短的主要因素之一,深入研究空化问题,寻找能准确评价转轮空化状态的方法有着积极的意义[2]。
1 空化空蚀产生机理及空化信号特点
1.1 空化空蚀产生机理
空化发生在水轮机转轮流道中局部压力下降到临界压力(一般接近汽化压力)时,水中气核发展成为气泡,从而使液相流体的连续性遭到破坏,变为含气的二相流。气泡中主耍充满着液体的蒸汽以及从溶液中析出的气体。当这些气泡进入压力较低的区域时,发育成长为较大的气泡,当气泡随水流运动到压力较高区域,气泡将迅速凝缩并溃灭。因此,空化包括了气泡的积聚、流动、分裂到溃灭的整个过程[3]。
水轮机空蚀主要发生在流速较高的转轮通道区域和尾水管肘管。水轮机中的空蚀大体可以分为:翼型空蚀、局部空蚀、间隙空蚀和空腔空蚀。对于混流式水轮机,主要有翼型空蚀和空腔空蚀。混流式水轮机的翼型空蚀主要是由于叶片的局部低压区形成的。空腔空蚀一般发生在低水头、低负荷时,尾水管空蚀涡带内部含有大量的气穴,当气穴崩溃时,将使转轮的泄水锥及尾水管的锥管段和肘管段遭受空蚀破坏[4]。对于轴流式水轮机,一般空蚀发生在转轮叶片和水轮机导叶尾部、底环以及尾水管进口处[5]。
对于空化的破坏机理多年来国内外学者进行了大量理论探索和实验研究,可以归纳为:机械作用、化学腐蚀作用、电化学作用和热力学作用等。
(1)机械作用理论。机械作用理论研究者认为过流壁面产生空化破坏是由于汽泡溃灭时产生微射流和冲击波的强大冲击作用所致。Hammitt通过计算和实测得出,游移型空泡溃灭时,近壁处微射流速度可达70~180 m/s;在过流壁面产生的冲击压力可高达705 MPa;微射流直径约为2~3μm,冲坑直径为2~20 μm,表面受到微射流冲击次数约为100~1 000次/(s·cm2):冲击脉冲作用时间每次只有几微秒,这样高的冲击作用将直接破坏物体表面而形成蚀坑,较小冲击力的反复作用则引起物体表面疲劳破坏[6]。
(2)化学腐蚀理论。一般说来,化学腐蚀作用常常与机械空化作用互相促进,空化加速腐蚀,腐蚀也加速空化,二者联合作用造成更严重的壁面破坏。
(3)电化学理论。在空泡溃灭时的高温高压作用下,金属晶粒中形成热电偶,冷热端之间存在电位差,对金属表面产生电解作用,造成电化学腐蚀。
(4)热力学作用理论。当气泡高速受压后,汽相高速凝结,从而放出大量的热,足以使金属融化造成损坏。
目前,机械作用是较为公认的造成空化破坏的主要原因。
1.2 空化信号的特点
研究表明,水轮机中的空化发展到比较严重的程度时,才会导致尾水管压力脉动信号特征的变化、机组振动和噪声增强以及水轮机效率下降,而在空化发生的初始阶段,液体冲产生的绝大多数空化的体积较小,空泡溃火时较短,辐射出髙频率的冲击脉冲声信号,主要是超声波信号。因此,监测空化超声波信有利于及早发现水轮机中的空化[1]。有关研究表明,空泡在固体表面溃灭时,像在弹性物体上溃灭一样,产生振动。但其声脉冲持续时间很短,是典型的冲击信号,具有很宽频谱,而同样的空泡在液流中溃灭时,其声冲击脉冲持续时间增大,而频带变窄,此时,空化辐射出的超声信号主要分布在30~120 kHz的频率范围内。这个频段很难由机械振动等低频声源产生,可以说是主要由空化产生的,避免了背景噪声的干扰[7]。另外,随着空化进一步发生时,液体中多数的空泡体积也随着增大,空泡溃灭时间增加,辐射出的声信号频率逐渐向低频区域过渡。因此,不同空化状态下的引起的脉冲辐射的频率并不固定。
综上,可以看出,空化信号具有如下的特点:①空泡溃灭时产生的声音是一些列的冲击脉冲信号,冲击脉冲信号的频次以及脉冲间隔并不固定,是一个典型的随机脉冲信号;②单次脉冲引起的声音幅射频率并不固定。
因此,通过检测识别空泡溃灭时发出的高频冲击脉冲信号的频次密度以及冲击脉冲的幅值能量强度是识别转轮空化程度的重要手段。
然而,传统的方式是通过在水轮机的适当位置安放振动声响传感器,以测量在适当频带内的噪声强度,计算反映水轮机空化脉冲性能的噪声脉冲频率[8,9]。这种方法的最大问题是难以识别出混杂在各种振动、噪声信号中的空化冲击脉冲信号,而且由于不同空化状态下脉冲辐射频率是变化的,这就更增加了有效识别空化冲击脉冲信号的难度[10,11]。
针对上述特点,本文提出采用基于快速谱峭度,结合数字包络进行空化信号冲击脉冲检测,进而利用识别出的冲击脉冲信号进行空化状态评价的方法。
2 基于快速谱峭度的冲击能量空化信号评价方法
2.1 谱峭度
谱峭度法(Kurtogram)是一个共振解调方法中带通滤波器中心频率和带宽参数确定问题的有效方法,广泛用于旋转机械故障诊断[12];Kurtogmm以滤波后时域信号的峭度值作为滤波效果度量指标,进而确定最优的滤波器频带范围。
峭度是描述波形尖峰度的一个指标,对冲击信号非常敏感,可以对信号非平稳强弱进行评判。但早期故障中信噪比很低,峭度作为一个全局指标不能正确地反应出故障类型,不适用于强噪声干扰环境下的故障检测。而谱峭度方法实际上是计算每一条谱线上信号的非平稳特性来确定非平稳特征所在的频率。研究表明该方法能够很好地提取出被噪声淹没的故障特征信号,同时还能表示故障相应频率的峭度值。
谱峭度的计算过程是首先确定一个一定时间长度的窗口,并且在窗口内对含噪信号进行Fourier变换得到其频谱, 沿时间轴移动窗口,可以得到不同时段的频谱。然后,对不同频带的谱统计其峭度, 得到的结果即为谱峭度。若频带选择适当并且避开了干扰噪声, 则可得到有用信号分量的峭度,该峭度与在时域得到的峭度一样反映相应信号分量的分布情况, 对信号的畸变敏感。谱峭度方法可以避开噪声干扰在某些频段上通过峭度检测其不确定性,从而得到故障特征信息。
假定信号为
(1)
式中,H(t,ω)为被分析信号x(t)的时频复包络,可采用短时傅里叶变换计算得到。
根据谱的阶矩定义,谱峭度可表示为
(2)
式中,C4y(ω)为信号y(t)的四阶谱累积量;S(ω)为谱瞬时矩。
假设实测振动或声音信号v(t)为
v(t)=x(t)+N(t)
(3)
式中,x(t)为有效的故障特征信号;N(t)为噪声信号。实际运行过程,空泡溃灭过程产生冲击脉冲,引起整个系统的共振(包括水体击金属结构),所得故障信号x(t)的通用模型为
(4)
式中,h(t)为单个脉冲的脉冲响应;Ak和τk分别为各个脉冲的幅值和发生时间。
从信号处理的角度看,谱峭度可以解释为:理想滤波器组的输出在频率ω上计算得到的峭度值,于是有
(5)
式中,Kv(ω)为实测信号的谱峭度;Kx(ω)为故障特征信号的谱峭度;ρ(ω)为信噪比倒数。因此,某一频率处信噪比高,则表示该处实测信号的谱峭度近似等于故障信号的谱峭度,从而可以找出最优滤波频带。
2.2 谱峭度空化脉冲冲击信号检测
正如前文所述,谱峭度可以很好地分析非稳定过程,如瞬时信号。而高度非稳态的瞬时信号的峭度数值取决于频率分辨率(Δf)。同时由于每一种瞬变时变现象对应着一种最优的频率带B(f,Δf)。因此,在实际的分析过程中,应该找到最优的频率与频率分辨率的信息,从而在这个区间内,峭度值达到最大值,即可以找到相关的瞬态信息。
采用谱峭度方法对空化冲击信号的检测,带通滤波器必须选择包含3倍以上的空化噪声频率。正如本文所说,在超声段频率,空化信号主要集中在30~120 kHz,因此需选择带通滤波器在20~360 kHz。
本文提出的采用快速谱峭度方法对空化冲击信号的冲击脉冲检测方法流程描述如下:
(1)根据空化噪声信号超声段的主要频率范围,结合采样频率确定最大分层数Nlevel。
(2)设定初始带通滤波器范围在20~360 kHz,采用1/3-二进滤波方式,按照确定的分解层数对信号进行滤波,根据式(2)计算各滤波信号的包络谱带通滤波峭度值K值,并生成直观的改进谱峭度图。最后选择最大谱峭度值对应频带的最优带通滤波器Bb(f,Δf)。
(3)选择Bb(f,Δf)进行带通滤波,通过数字包络解调,求解空化信号的包络信号。
(4)通过空化信号的包络信号识别统计冲击脉冲信号的频次和强度。
详细算法流程如图1所示。
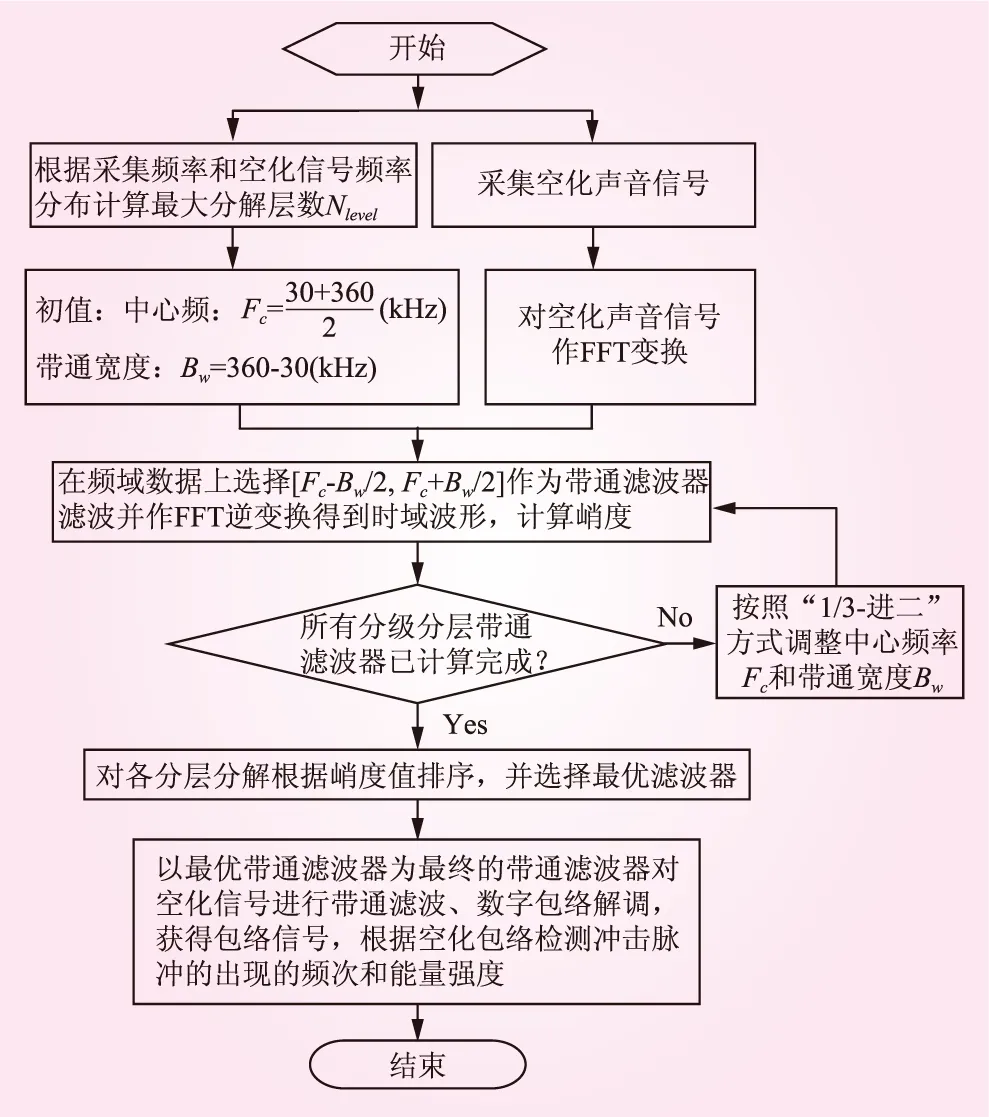
图1 谱峭度空化脉冲冲击信号检测法流程
以下几个图是利用本方法对某轴流转桨式机组的空化信号进行检测的一个实例。其中图2是该机组在低负荷区采集到的原始的空化声音信号,在该负荷区存在着较为严重的空腔空化和叶形空化,然而由于原始信号中混叠有大量的振动、碰撞、噪声等信号,直接地从原始信号中识别出空泡溃灭导致的冲击脉冲信号几乎不可能,或者难以准确识别和统计。
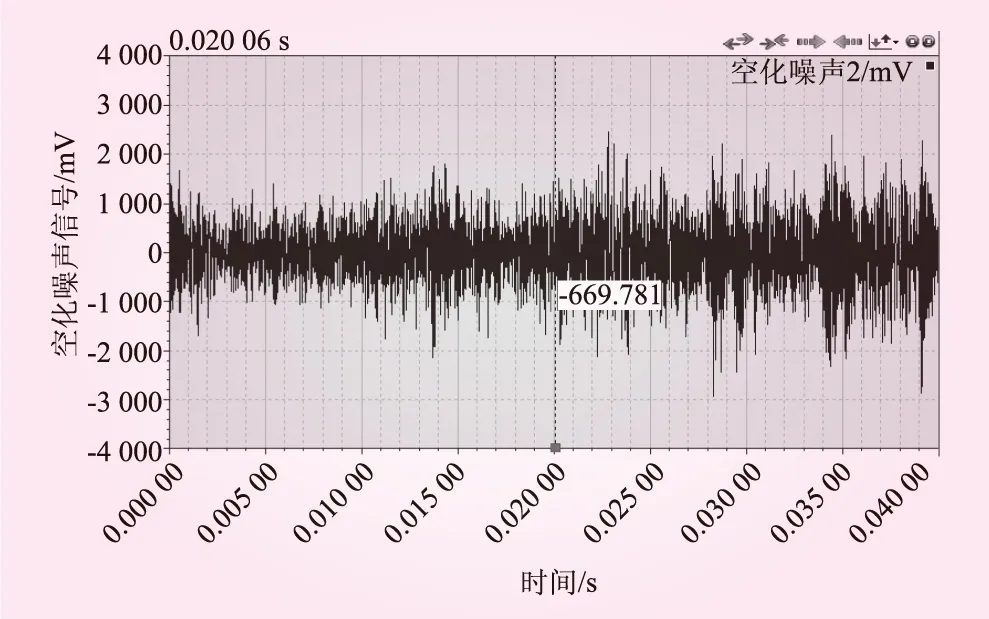
图2 原始空化声音信号
图3是采用谱峭度计算出来的各分层分解的带通频带对应的峭度示意图,其中不同颜色代表了不同的峭度值,颜色越红峭度值越大。从图中可以直观地观察到,当带通滤波器选定在[66 666.664 Hz,75 000.0 0 Hz]时,峭度值达到最大值,因此[66 666.664 Hz,75 000.00 Hz]是该空化信号的最优带通滤波器。
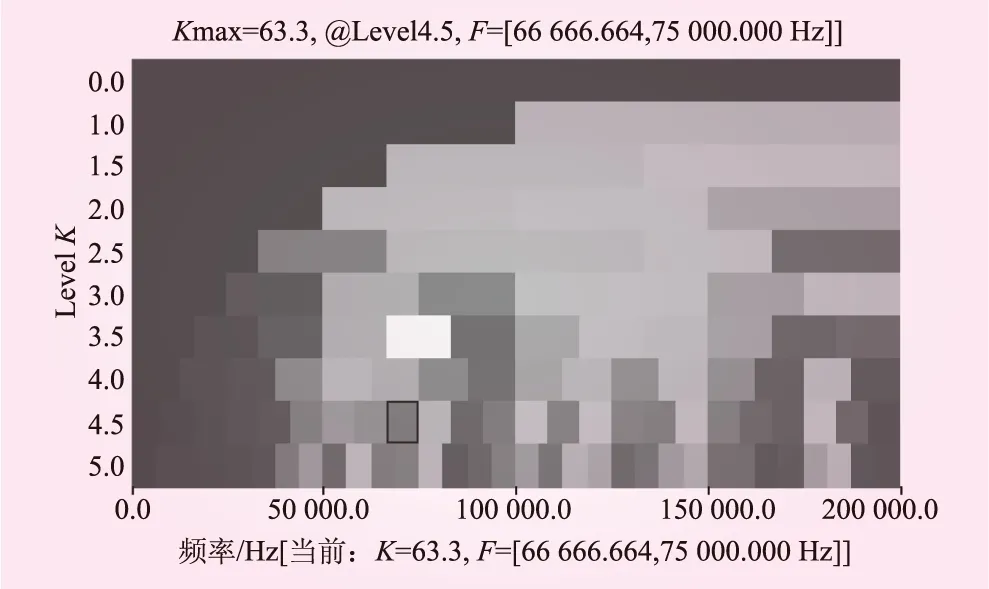
图3 谱峭度计算示意
图4是将最采用最优带通滤波器对原始空化信号进行滤波以后的空化信号时域波形,从波形中可以清晰地观察到多个高幅值的冲击脉冲信号。
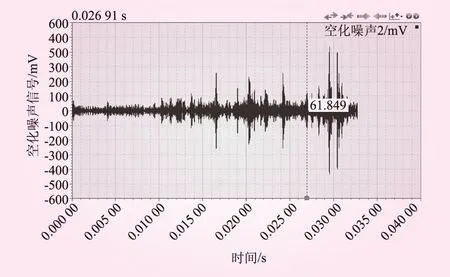
图4 用最优带通滤波器滤波后的空化波形信号
图5 是采用数字包络解调技术对滤波后的空化声音波形信号生成的包络波形[13],通过包络波形信号可以更准确的对冲击脉冲识别,可以检测出脉冲出现的频次、时刻以及冲击的幅值。

图5 带通滤波后空化声音信号的包络波形
2.3 冲击脉冲能量空化状态评价方法
对空化声音信号通过快速谱峭度计算获得最优带通滤波器滤波,进而利用数字包络解调算法获得空化声音的包络波形,通过对包络信号的识别可以获得冲击脉冲的数量、以及每个冲击脉冲的时间宽度以及脉冲的幅值大小。
设空化声音信号的包络波形函数为xe(t),那么假定第i个冲击脉冲从t=t0开始,t=t1结束,如图6所示。那么定义Epi为该冲击脉冲的能量,即

图6 单个空化声音冲击脉冲作能量积分示意图

(6)
也就是Epi对应了包络波形函数xe(t)在[t0,t1]之间的面积。根据定义,Epi的值不仅与脉冲的幅值有关系,而且与脉冲的总时间宽度有关系,脉冲的幅值越高,Epi也越大;脉冲持续的时间越长,Epi也越大。因此通过Epi,能正确反映出不同空化阶段,单个空化脉冲能量特性的变化。
设Lp_T为在给定时间内(t=ΔT)通过上述方法检测到的脉冲的总数量,Epi为给定时间内第i个冲击脉冲的能量,那么可定义
(7)
(8)
(9)
式中,Ep为单位时间内的空化冲击脉冲的总冲击能量值;Ep_ave为单位时间内的平均空化冲击脉冲能量值;Lp单位时间内的空化冲击脉冲重复率。
综上,根据转轮空化发生的机理,当空化发生时,空泡溃灭将会产生大量的随机冲击脉冲,因此从测量的空化声音信号中可以提取冲击出现的频率,和累计单位时间内的冲击总能量,通过这两个评估指标就可以评价转轮的空化状态了。
一方面,空泡溃灭的冲击脉冲频次Lp越高,说明空泡越多,对转轮叶片、尾水管等部位的破坏也越大。另外一方面,单位时间内的冲击总能量Ep越大,说明空泡越多而且脉冲的幅值越大,或者脉冲持续的时间越宽,对水轮机过流部件的破坏也越大。因此,借助于单位时间内的冲击总能量Ep和冲击脉冲频次Lp可以实现对水轮空化状态和发展水平的分析评价。
3 算例分析
近年来,福建某水电厂轴流转桨式机组转轮空化日益严重,在机组转轮轮毂、桨叶出水边上下部、进水边上部、转轮室里衬等部位产生了空蚀,造成水轮机转轮的流线破坏、机械构件损坏等,影响了机组的安全稳定运行。为了验证本分析评价方法的的有效性,在该电站某机组上尾水管门外壁安装了超声宽频传感器,测量了该机组在不同负荷下的水声信号,并利用本评价方法对测量数据进行了分析,详细如下。
图7是该机组尾水门超声信号的频谱阵列图(滤除可闻声段的信号,保留20 kHz以上的超声信号),右列坐标为机组负荷,横坐标为频率(Hz),纵坐标为空化声音幅值。从上图看到,该机组在低负荷区(30 MW以下),空化声音信号主要集中在30~120 kHz 之间,而在高负荷区(110 MW以上),这个频段的声音信号分布很小。
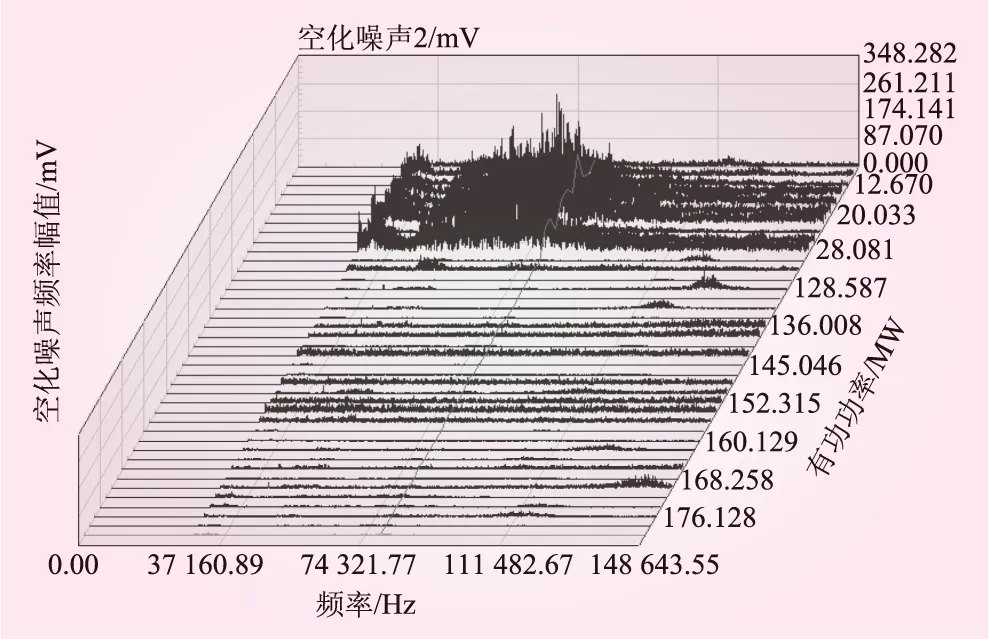
图7 空化声音信号的频谱阵列示意
经与该机组模型试验对比和早期研究可知,该机组在低负荷区存在较为强烈的空腔空化和翼型空化;而在高负荷区,该机组空腔空化则减小、变弱。对比测量的声学信号可知,在低负荷区产生的30~120 kHz信号,正是由于该机组的空腔空化和和翼型空化引起的声音信号。根据其频率分布特点,可以认为,该空腔空化和和翼型空化引起的空化冲击脉冲信号引起的声音主要分布在30~120 kHz之间。
图8是采用谱峭度方法寻求最优带通滤波之后低负荷区空化声音信号,从该图中可以观察到非常明显的大幅值的冲击脉冲信号。而在高负荷区,冲击脉冲信号幅值和频次则小很多,证明了采用该方法可以识别出有效的脉冲冲击信号。
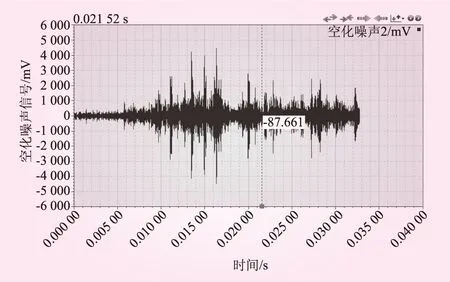
图8 采用谱峭度进行最优带通滤波之后的空化声音信号
表1为不同负荷区下空化冲击脉冲能量及频次统计结果,图9、10分别为不同负荷区下空化冲击脉冲重复率分布、能量分布。从表1以及图9、10可以看出,在低负荷区单位时间内的冲击脉冲重复率最高达到7 000次/s以上,反观高负荷区,冲击脉冲重复率则低于3 000次/s以下;另外,在低负荷区单位时间内的冲击脉冲能量超过300 Pa·s;而在高负荷区,冲击脉冲能量值不高于40 Pa·s。从而可以看出,通过冲击脉冲重复率和冲击脉冲能量可以较好的反映出水轮机的空化状态和变化水平。

表1 不同负荷区下空化冲击脉冲能量及频次统计表(部分数据)
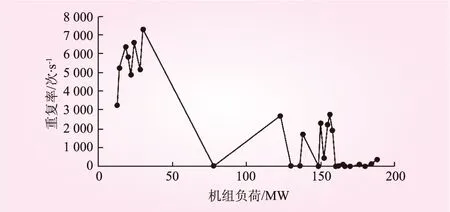
图9 不同负荷区下空化冲击脉冲重复率分布
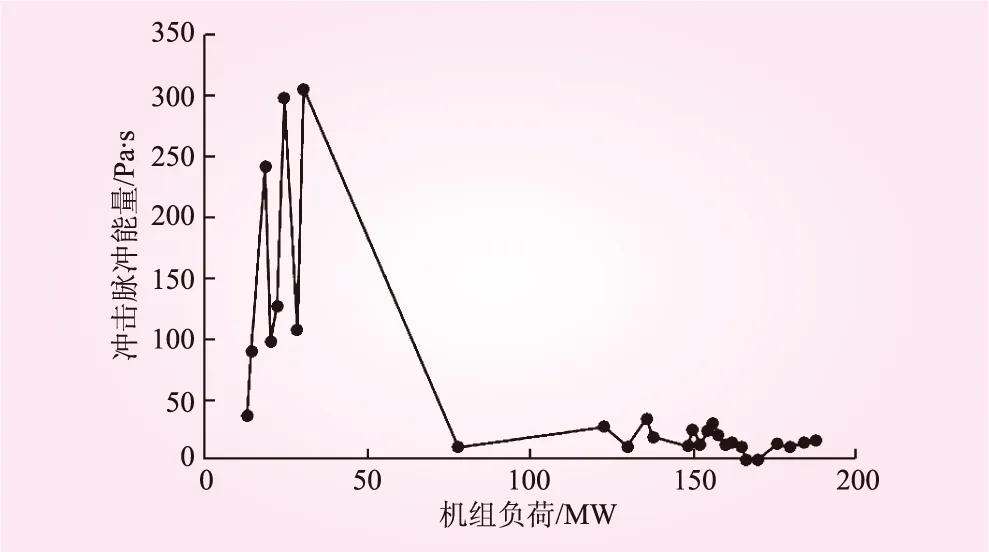
图10 不同负荷区下空化冲击脉冲能量的分布
4 结 语
本文研究了基于谱峭度的冲击能量法在空化状态评价的应用,并通过实际测量数据的对比分析证明了该方法的有效性和实用价值。从实际意义来说,如果能找到有效的空化状态评价方法,不仅可以实现对机组的早期故障预警,而且,也可为指导检修提供重要的参考意义。然而,受限于测量数据、测量手段的限制,目前本方法上目前尚不能更精确地区分各类空化类型,亟需对更多的测试数据和和不同类型机组、不同工况下的数据进行分析和挖掘处理,以便修正和完善改进分析评价的更精确模型。另外,探索利用机器学习以及深度机器学习进行空化声音信号的分类与识别以及空蚀的发展程度也将是一个重要的方向。