基于 TRIZ 理论的夹抱式 AGV创新设计
2020-03-12邹扬波李占江
文/潘 军 邹扬波 李占江
在现代制造业的先进工厂中,AGV成为一种普遍应用的搬运工具。尤其在烟草工业生产过程中,AGV 的使用非常广泛,车型与搬运方式也多种多样。在卷烟生产工艺中,箱式储丝工艺以其独特的优势已经成为一种技术发展的方向和趋势。应用箱式储丝工艺需要解决烟丝箱的搬运和存储问题。如果采用非托盘式底部结构的烟丝箱,不用投资货架而是直接进行烟丝箱间叠放堆垛的方式进行烟丝箱的存储,就要用到夹抱式AGV。夹抱式 AGV ,由于工作场景特殊,对 AGV 的运行和烟丝箱的定位均有较高要求,属于 AGV 中的高端车型。该装备的技术含量高,开发难度大,市场一直为国外 AGV 厂商把持。为了开发出国内自主知识产权的夹抱式AGV 产品,不但需要开发人员有丰富的AGV 系统规划设计能力、机械设计能力和电控设计能力,更需要在研发管理和创新手段、方法上有一定的章法可循,它稳定高效地保证了产品开发项目的成功。本项目就是基于这一理念,在国内首次将 TRIZ 理论方法应用到新型高端AGV 产品的开发中,实现了创新方法的升级和质变。

图1 夹抱式 AGV 外形
一、TRIZ 理论与创新方法
TRIZ 理论由前苏联发明专家G.S.Altshuller 提出,其英文名字为“theory of inventive problem solving”,“TRIZ”是将原俄文字母转化成拉丁文后的字母缩写,在国内也有人译为“萃智”理论。Altshuller 在前苏联的海军专利局工作,他的团队从250 万个专利样本空间中,筛选出 50 万个发明质量高的专利,然后再对这 50 万个专利按创新性高低进行分级研究,最后从中抽象概括出一种发明问题解决的理论。该理论的基本理念是解决发明问题的基本原理是客观存在的,这些客观存在可以整理成一套应用工具,掌握该工具的人可以提高发明效率,缩短开发周期。相对于传统的创新方法如头脑风暴法、试错法、形态分析法、和田十二法等,TRIZ 创新方法有诸多优势。首先,TRIZ 创新方法是一种主动式的、方向明确的创新方法。TRIZ 理论有严谨的方法论步骤可遵循,给创新提供明确的思路和方向。其次,TRIZ 理论能够提供跨领域、跨专业的解决问题的思路和建议。最后,TRIZ 理论能够预测技术的发展,跟踪产品的进化过程,为企业的战略决策提供测算模型和理论依据。
解决任何问题的过程都包含两部分:问题分析和问题求解。TRIZ 理论进行创新性的解决工程问题的基本流程和求解过程如图2。
从图2中可以看出,TRIZ 理论在解决具体工程问题时首先将问题抽象成TRIZ 理论的通用模型。TRIZ理论的通用模型包括功能模型、物-场模型等,而且 TRIZ 理论对描述模型的符号体系、建模的概念均有明确定义。工程人员将实际的工程问题用 TRIZ 理论进行建模后,就可以使用 TRIZ 理论对不同性质的模型提供的不同通用解法。按模型的性质划分,模型主要有技术矛盾模型、物理矛盾模型和物-场模型等。TRIZ 理论首先把问题看作是多个子系统组成的系统或超系统。技术矛盾指的是一个系统中两个子系统之间的矛盾。比如在某系统中,一个子系统有一个有益的功能,却对另一个子系统产生了有害的功能,这在工程中经常遇到。物理矛盾的定义是一个产品或性能同时有两种相反的状态存在,即对同一参数特性的需求相矛盾。物-场模型是以物质和场的形式表示的工程系统中任意子系统的模型。对于技术矛盾模型,TRIZ 理论提供一种由 39 个参数组成的 39x39 的“矛盾矩阵”和 40 个发明原理的组合工具来提供TRIZ 理论通用解。对于物理矛盾模型,TRIZ 理论提供了四种分离方法来找到TRIZ 理论通用解,即空间分离、时间分离、条件分离、整体与局部分离。每种分离下对应的 40 个发明原理中的部分发明原理为该模型的通用解。对于物-场模型,TRIZ 理论提供分成 5 类的 76 个标注解为该模型的通用解。对于更复杂的系统和模型,TRIZ 理论提供 ARIZ 算法作为寻找 TRIZ 理论通用解的工具。有了TRIZ 理论提供的通用解,再通过类比联想的方法,结合自身的专业知识,就可以找到具体工程问题的针对解法,得出具体问题的解决方案。经典 TRIZ 理论的体系结构如图3。
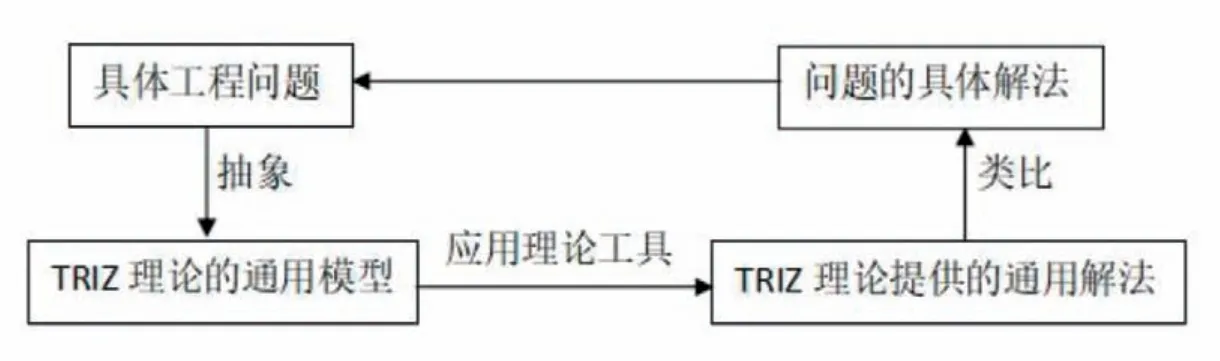
图2 TRIZ 理论解决工程问题的基本流程
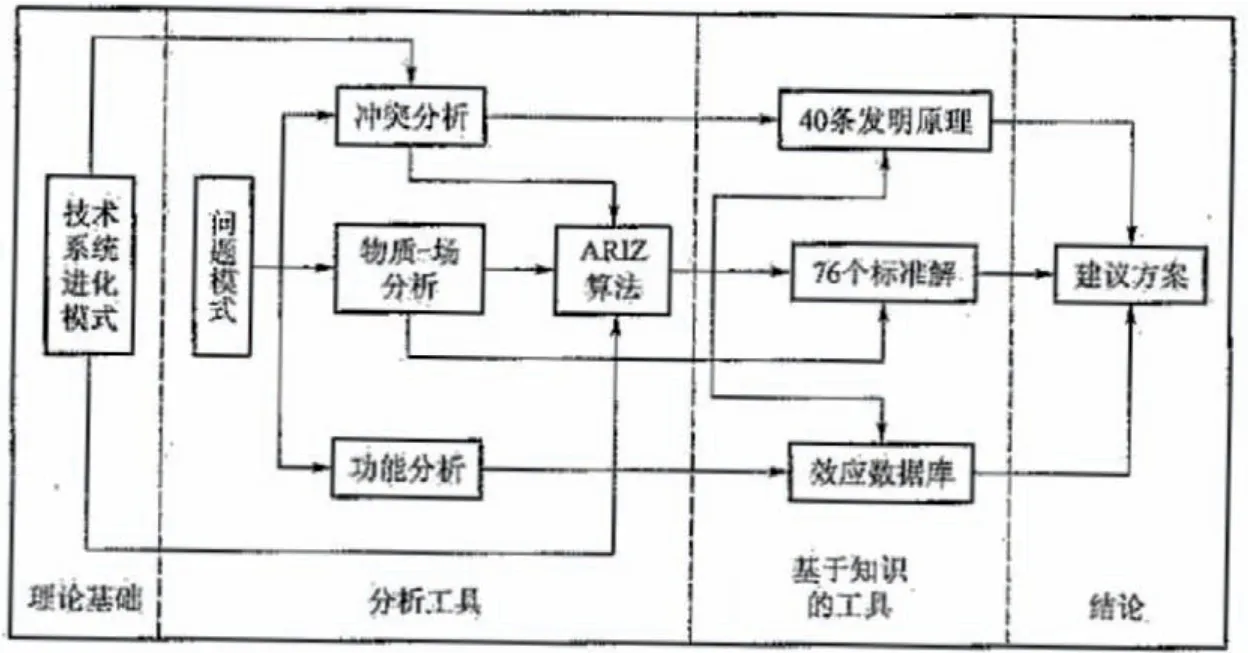
图3 经典 TRIZ 理论的体系结构
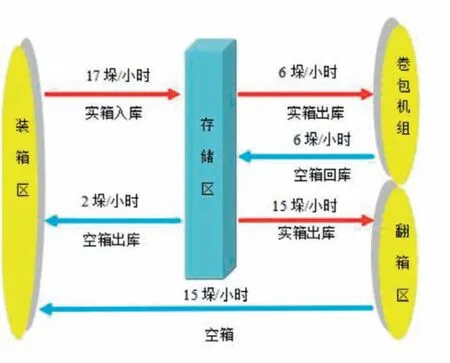
图4 AGV 系统的流量要求
图5 烟丝箱的外形
二、夹抱式 AGV 项目的开发
本项目开发的夹抱式 AGV 用于国内某省卷烟厂的烟丝库技改项目。夹抱式AGV 搬运的对象为烟丝箱,AGV 系统的搬运流量要求如图4。烟丝库烟丝箱的储存形式为地面码放、四箱叠放,总储位数为 372 箱。存储的物料为成品烟丝。烟丝箱的外形尺寸为
1284mm(L)×1284mm(W)
×1280mm(H),
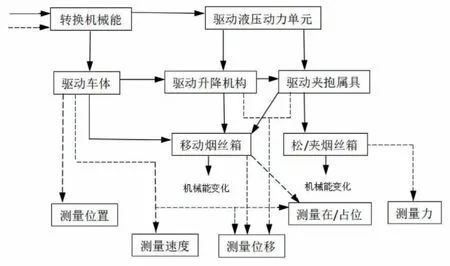
图6 夹抱式 AGV 的功能结构
实箱重量小于400kg。要求夹抱式AGV 能够搬运单箱或搬运双箱叠放的箱垛,能够取放到 4 层箱垛最高一层的单箱,或取放双箱叠放的箱垛。烟丝箱的外形规格如图5。
该项目烟丝库系统的基本要求包括:系统要适应柔性生产、批次管理、按订单生产、质量跟踪、信息跟踪不断线、减少造碎等需求。采用先进柜再装箱的模式,设置人工装箱外发烟丝功能。具备批次先进先出功能。箱子倒料后有自动检测余料功能及自动清除余料功能。正常储丝 5 批次烟丝,进入存储区的烟丝箱需带盖。在接受一个批次生产指令时,系统对于不能满足生产要求的库存发出预警信息。实现全过程信息采集、批次跟踪。现场需配置操作终端,满足现场使用要求,同时预留与上位系统(MES、ERP 等)接口等。夹抱式 AGV的外形如图 1。
该夹抱式 AGV 采用平衡重式叉车的基本原理,自主设计车体机械结构,将原叉车前端的货叉改为夹抱式的叉车属具。基于 NDC 的平台采用“激光+磁点”复合导引技术,既有激光导引系统稳定性高,AGV 运行速度快的优点,又能适应当夹抱式 AGV 进入烟丝箱垛的存储区后,无法有效接收反射回的激光定位信号的问题。AGV 在其运行区域内,通过其车载通信装置与系统控制计算机通信,报告其位置及状态,并接受调度和工作指令。其工作过程为:当接收到货物搬运指令后,AGV 小车控制器根据所存储的运行地图和 AGV 当前位置及行驶方向进行计算、分析,选择最佳的行驶路线,自动控制 AGV 的行驶和转向,到达装载货物目标点准确定位后,夹抱式属具动作,完成取箱过程或反之完成放箱过程。AGV系统接受并执行 WMS呼叫的在上货站台和库内货位之间的输送指令;AGV 系统如果同时接到多个输送指令,系统会依次存储多个指令,并且按照“先进先出”的原则执行这些指令。AGV 的空闲等待位置(充电区)设在仓库出库站台的附近,因为这里是物流量主要来源。为了保证运行安全,夹抱式 AGV 设置多重安全保护机制。不仅在 AGV 前进、后退时分别设计激光扫描安全器件,同时也设计了机械接触式的安全触边器件,外加触手可及的急停开关共 3 重安全机制。为确保AGV 工作可靠,该夹抱式 AGV 还设计有检测在位或占位的功能。
三、TRIZ 理论在项目的应用
在应用 TRIZ 理论指导夹抱式 AGV开发时,首先从系统和子系统的角度认识夹抱式 AGV 的功能。应用 TRIZ 理论描述夹抱式 AGV 的功能组成时使用标准的设计语言,夹抱式 AGV 的每一个功能组成单元的表达包含两类术语,即功能与流。
前者用“动词+名词”的固定结构词组来描述,后者用带箭头的实线或虚线描述能量、物料或信号的输入或输出。根据 TRIZ 理论分析夹抱式 AGV 的功能结构如图 6。从该功能结构图认识夹抱式 AGV 应具备的功能,不仅使夹抱式 AGV的开发方向变得明确、清晰,机械和电气设计人员的工作目标沟通与配合也更加容易,也使得夹抱式 AGV 功能的细化设计方向变得清晰。比如对夹抱烟丝箱的叉车属具功能加以细化,从图上分析得出属具不仅要具备夹紧或松开烟丝箱的功能,同时属具还要有移动烟丝箱的功能。在属具移动烟丝箱的过程中要测量移动的距离以保证烟丝箱叠垛时能够位置恰当;在属具夹紧烟丝箱时测量夹持力,要能够保证属具既能提供所需的属具夹爪与烟丝箱间产生足够大静摩擦力时的正压力,又不至于发生夹持力过大而对烟丝箱造成损伤。
安全设计是 AGV 设计工作的一个重要方面。由于夹抱式 AGV 后退进入烟丝箱存储区时,左右两边和后退方向上往往有落地存放的 4 箱叠放的烟丝箱垛,如果夹抱式 AGV 或被搬运的烟丝箱与这些烟丝箱发生碰撞,就会发生严重的安全生产质量事故。这使得夹抱式AGV 的安全设计比普通 AGV 的安全设计要求更高。通常 AGV 在后退驶向货位时,会在 AGV 上加装一个激光障碍物扫描器件,或者采用接触式机构设计提供安全检测机制。但由于夹抱式 AGV 搬运着叠放的双烟丝箱时,烟丝箱比车身还高出许多,解决这个高出的部分在夹抱式 AGV 后退过程中的安全无碰撞问题就成为一个实际的工程难题。应用 TRIZ理论的技术矛盾模型求解方法可以帮助解决此问题。前文提及该模型是通过矛盾矩阵和 40 个发明原理来帮助解决具体问题。矛盾矩阵的行是实际问题可能涉及到被改善的39 个工程参数,矛盾矩阵的列是实际问题可能涉及到的被恶化的39 个工程参数。而行列在矩阵中对应的位置上的几个数字,代表 40 个发明原理中的某几个发明原理的序号。夹抱车后退驶向货位安全问题,可以抽象为改善了第 30、35号工程参数,它们分别代表“影响物体的有害因素”、“适应性及多用性”,也可以抽象为恶化了第 25、36 号工程参数,它们分别代表了“时间损失”、“装置的负杂性”。查找 TRIZ理论提供的矛盾矩阵表可以得知,第35、18、34、22、19、29、40、28、15、37 号发明原理是该技术矛盾模型的通用解法。进一步查表了解各发明原理的含义,发现第 18 号发明原理为“振动”,使物体处于振动状态的发明原理对于解决夹抱车后退驶向货位安全问题有极强的启发作用。最终,将传感器设计在属具夹爪的末端,使夹抱式 AGV 在驶入货位巷道前往复运动一个区间,以确认后退方向在高位空间上没有障碍物存在,为夹抱式 AGV 安全驶入巷道提供了可靠的安全机制。
四、结论与展望
本项目在解决夹抱式 AGV 产品开发过程中遇到的各种工程问题时,TRIZ理论提供了极大的帮助。比如对属具夹爪夹紧力的设计问题便是一个典型的物理矛盾模型,既希望力量大能够夹紧烟丝箱以实现夹抱可靠,又希望夹紧力小以减少对烟丝箱抵抗变形能力的要求。应用 TRIZ 理论提供的空间分离原理下对应的通用解中的第 17 号发明原理“维数变化”即是解决问题的完美思路。近年来 TRIZ 理论已经发展成为我国创新工作的重要组成部分。有研究文献指出,从 2008 年到2018 年这 10 年间,发表 TRIZ 理论相关的论文约 3700 多篇,且发文量呈递增的趋势。TRIZ 理论的应用也从解决工程技术问题拓展到了解决企业管理问题。比如通过集成 TRIZ和精益管理模式来有效提高精益管理的水平,并在烟草公司物流动作改善的实际案例中得到验证。部分高校也已经开始在校内设立 TRIZ 理论相关课程。在学术界和企业内部,我国 TRIZ 理论的研究和应用水平正在逐年提高。但同时也不得不承认,尽管 TRIZ 理论已经发展了几十年,国内的技术人员总体上对于该理论还是比较陌生的。在我国推进“中国制造 2025”的伟大历史进程中,不仅要发挥创新精神,也要对创新方法进行升级和创新,本项目夹抱式 AGV 的开发,为应用 TRIZ 理论创新解决工程问题提供了又一实际参考案例。