甘蔗横向种植机补种系统设计与试验
2020-03-11何永玲李尚平刘天翔玉运发邓樟林
何永玲 吴 飞 李尚平 刘天翔 玉运发 邓樟林
(1.北部湾大学机械与船舶工程学院, 钦州 535011; 2.广西大学机械工程学院, 南宁 530004;3.广西民族大学信息科学与工程学院, 南宁 530006)
0 引言
甘蔗种植是甘蔗生产过程中劳动强度最大的环节之一,其作业质量直接影响新植蔗或宿根蔗的产量。我国甘蔗种植机研究较为薄弱,因此制约了甘蔗产量的增长[1]。目前,我国生产的甘蔗种植机大多数是实时切种式,其自动化程度低,机种率约36%,辅助排种需要人工多,劳动强度大[2-3]。与人工种植相比,甘蔗机械化种植过程中易出现漏播、排种不均匀现象[4],作业中常常通过人工补种来降低漏种率,因此加大了人工劳动强度,提高了生产成本等。
目前,国内外对播种监测系统进行了很多研究,如国外应用光电传感器、激光等方法检测甜菜、玉米等种子的粒距均匀性。国内利用光电传感器、高速摄影等方法监测排种情况[5-7]。也有研究设计了补种装置[8],但目前对于甘蔗漏种还处于漏种监测与标识的水平。预切种式横向种植技术采用深种浅覆盖的方法,其排种的方向与垄沟垂直,具有植株密度合理、出芽率高、产量高、用种少的特点,有利于甘蔗抗倒伏和宜于甘蔗芽出苗。
本文针对其种植密度均匀性差、人工补种的劳动强度大、生产效率低等问题,从提高补种准确性和补种稳定性出发,提出在甘蔗横向种植机上加装一套补种装置和控制系统,以实现横向种植机的实时补种。该系统采用分级传动方式,通过对补种装置的充种、储种、供种、护种及投种过程分析和试验探讨,以期达到连续供种和连续补种的目的。
1 结构与工作原理
1.1 种植机整体结构
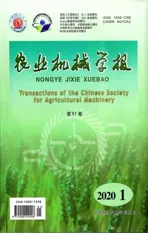
甘蔗横向种植机主要由开沟器、机架、倾倒装置、链式播种器、补种装置、辅助轮、覆土机构、地轮、施肥机构等组成。横向种植机整体结构如图1所示。
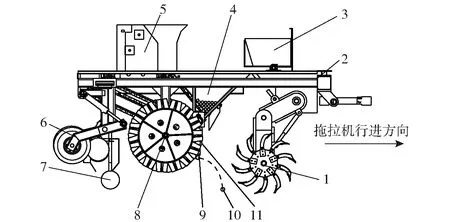
图1 横向种植机整体结构图Fig.1 Overall structure diagram of transverse planter1.开沟器 2.机架 3.倾倒装置 4.链式播种器与集蔗箱 5.补种装置 6.辅助轮 7.覆土机构 8.地轮 9.施肥机构 10.蔗种落点 11.导蔗槽
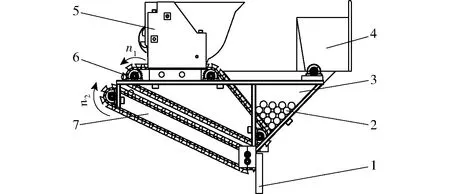
图2 试验样机结构示意图Fig.2 Schematic of test prototype structure1.导蔗板 2.蔗种 3.集蔗箱 4.倾倒装置 5.补种装置 6.播种器输送带1 7.播种器输送带2
1.2 整机工作原理
如图2所示,工作时,拖拉机牵引种植机作业,由地轮转动为播种器和施肥机构提供动力。将已装框的蔗种通过倾倒装置有序倒入集蔗槽中,两侧均有12框蔗种,可连续供种到集蔗箱中,再通过链式播种器连续有序地提升传送进行播种。补种系统安装在链式播种器的传送链上方,当发现有漏种情况,补种装置立即进行实时补种,同时由单独的供种箱向补种装置供种,使其连续作业,蔗种最终通过链式播种器将蔗种导出横向掉落到开沟器开好的沟中。然后利用施肥机构进行施肥,覆土机构进行最后覆土,完成蔗种种植过程。
1.3 补种装置结构
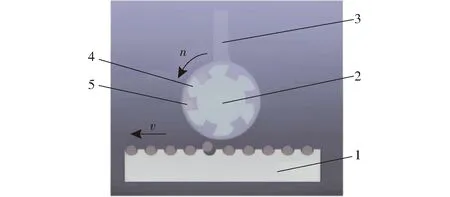
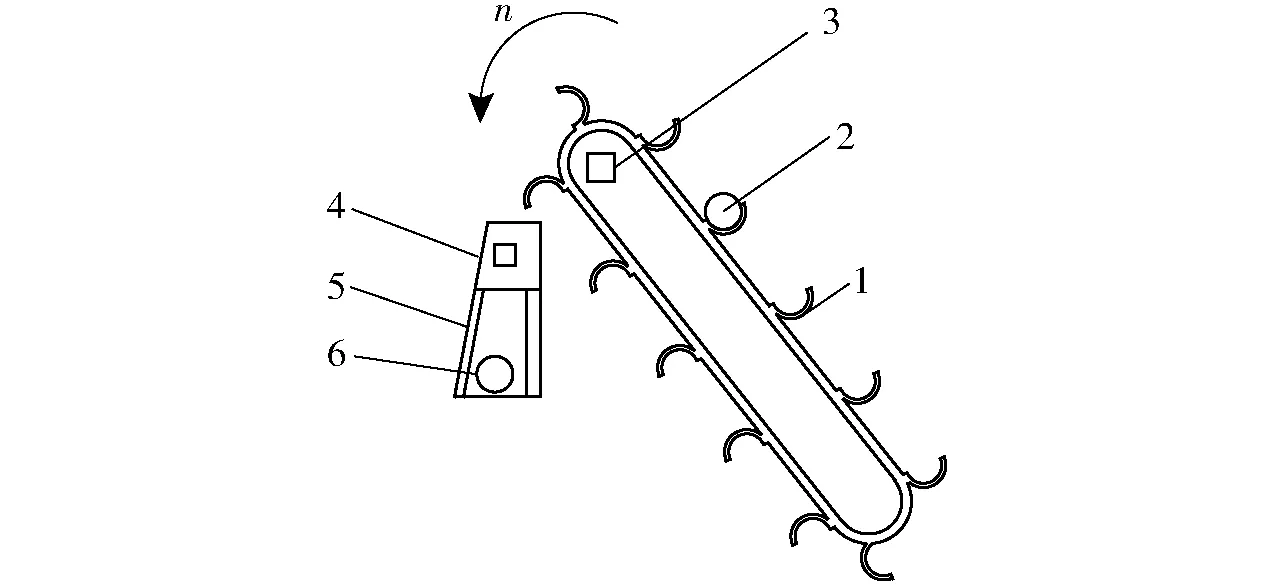
基于农艺要求设计了具有有序排种、连续供种和及时精确补种功能的辊槽式补种装置,该装置主要由补种箱、提升机构、储蔗槽、补种辊耙、漏种检测装置、导流板、机架等组成,辊耙式甘蔗补种装置结构示意图如图3所示。

图3 辊耙式甘蔗补种装置结构示意图Fig.3 Structural schematic of rake-roller sugarcane replanting device1.漏种检测装置 2.蔗种 3.提升机构 4.补种箱 5.半圆槽 6.补种辊耙 7.导流板 8.余量不足检测装置 9.储蔗槽 10.支架 Ⅰ.充种区 Ⅱ.储种区 Ⅲ.供种区 Ⅳ.护种区 Ⅴ.投种区
1.4 补种装置工作原理
工作时,采用分级传动控制,由供种过程和补种过程组成。①供种过程:当储蔗槽中蔗种余量不足时,余量不足检测装置将检测的信号传给控制器,控制提升机构动作,及时将蔗种从补种箱里斜向上输送,当链槽越过最高点时,蔗种不再受链槽支持力,只受重力作用,蔗种做类平抛运动掉入到储蔗槽中,完成对补种辊耙的供种过程。②补种过程:当漏种检测装置检测发现播种器传送带的链槽中出现漏种,将信号传至单片机,单片机输出PWM脉冲信号控制补种辊耙工作,蔗种在离开导流板瞬间做近似斜抛运动完成投种过程,即完成补种过程。
当补种箱内蔗种余量不足时,报警电路发出报警,提醒工作人员对补种箱蔗种进行补给。在整个补种过程中,由于提升机构的有序排种,储蔗槽的有序储蔗以及补种辊耙的准确补种,补种装置实现了不堵蔗、不卡蔗,实现了连续和准确补种的功能。
2 关键部件设计与分析
2.1 充种过程分析
充种过程中,提升机构做角速度为ω(rad/s)的旋转运动,底层蔗种随着机构有序地从补种箱中提升,提升机构的半圆槽在提升过程中依次将蔗种充入槽内。经反复试验提升机构与水平面夹角θ取55.3°较合适,既可满足将甘蔗提起又能保证一个槽只有一根蔗种[9]。
当提升机构工作时,蔗种的充种过程分析如图4所示。
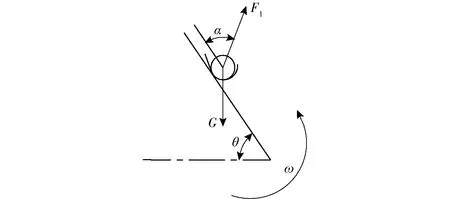
图4 充种过程分析图Fig.4 Stress analysis diagram of sugarcane species
由图4蔗种受力分析可得
Gsinθ=F1cosα
(1)
Gcosθ=F1sinα
(2)
式中G——蔗种重力,N
F1——半圆槽对蔗种的支持力, N
α——F1与提升斜面的夹角,(°)
由式(1)、(2)可知,在提升机构匀速提升过程中,半圆槽对蔗种的支持力F1一直存在,其随着提升位置改变而改变,但蔗种始终保持相对平衡的状态。
当蔗种通过提升链送至储种区时,由于蔗种从半圆槽中转出时仅受自身重力和传送带的离心力作用,蔗种所受的向心力不足以维持蔗种在槽内的稳定状态,因此蔗种沿半圆槽斜面切线滑出,蔗种按照斜抛运动被抛出,落入储蔗槽中,完成储蔗过程[10]。其储蔗过程分析如图5所示。

图5 储蔗过程分析图Fig.5 Analysis diagram of sugarcane storage process
2.2 补种辊耙设计
2.2.1辊槽截面形状
辊槽形状和尺寸受蔗种品种、尺寸、形状等的影响。本文选取半年蔗蔗种,按照双蔗芽蔗种要求进行预切种,经测量蔗种直径为25~30 mm,长度380 mm左右,蔗种形状近似圆柱体,有微小的弯曲变形,根据蔗种的形状特征将槽型定为近似矩形(如图6所示)。
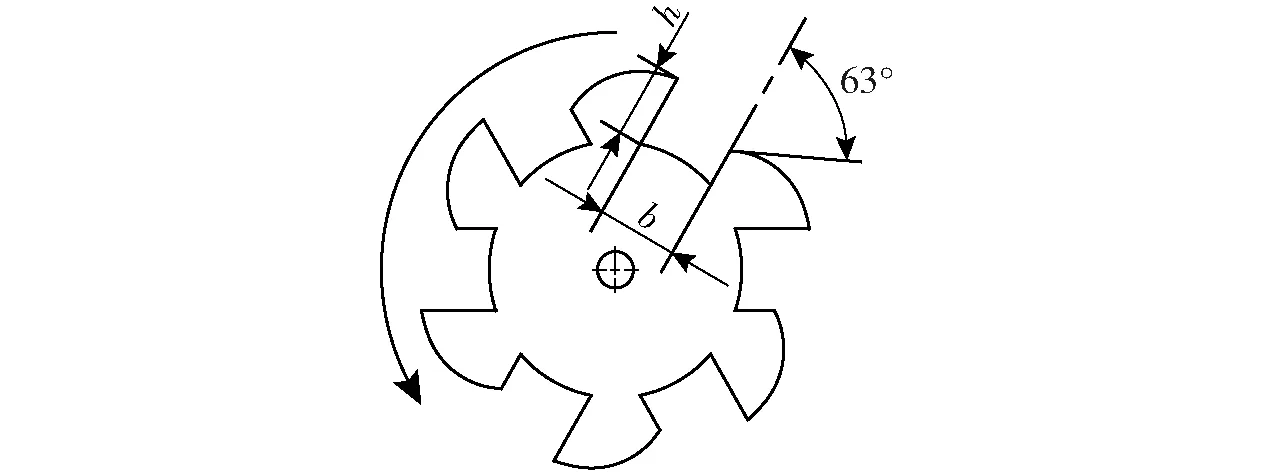
图6 补种辊耙结构示意图Fig.6 Schematic of replanting roller rake structure
本研究选用有助于顺利供种和减轻供种过程中储蔗槽对蔗种损伤的矩形形状槽型,其一侧带有圆弧倒角,将储蔗槽对蔗种的力有效地分解掉,同时蔗种在此过程中发生滚动从而保护了蔗种不被损伤。根据控制设计要求,每个辊槽中只能存放一根蔗种,辊槽宽度b和高度h须满足[11]
(3)
式中dmax——蔗种最大直径,mm
k——蔗种挠度补偿系数,mm
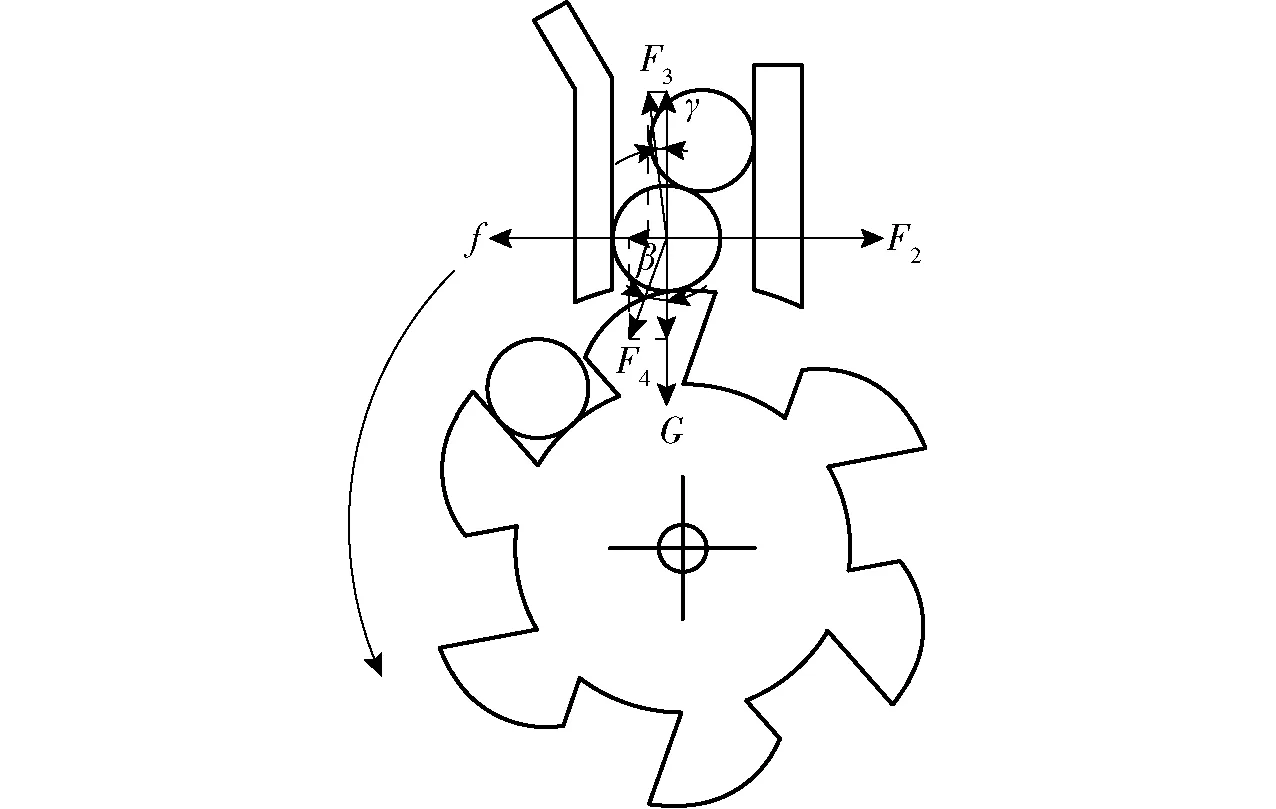
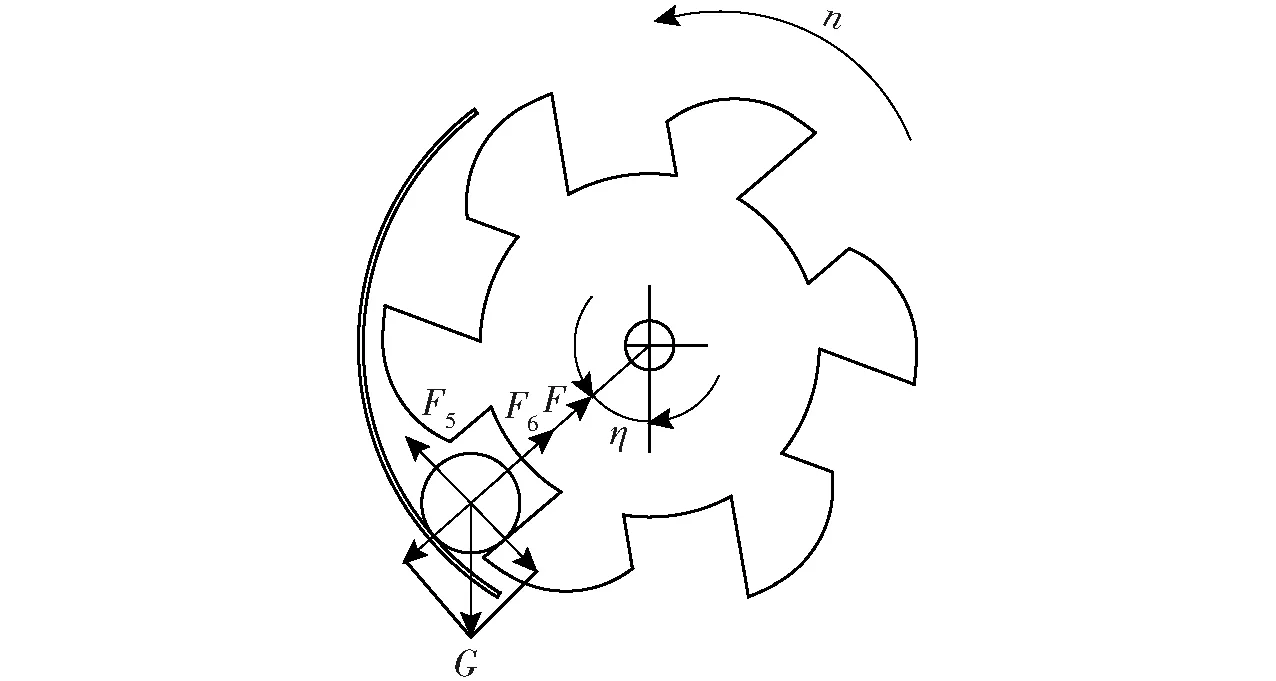
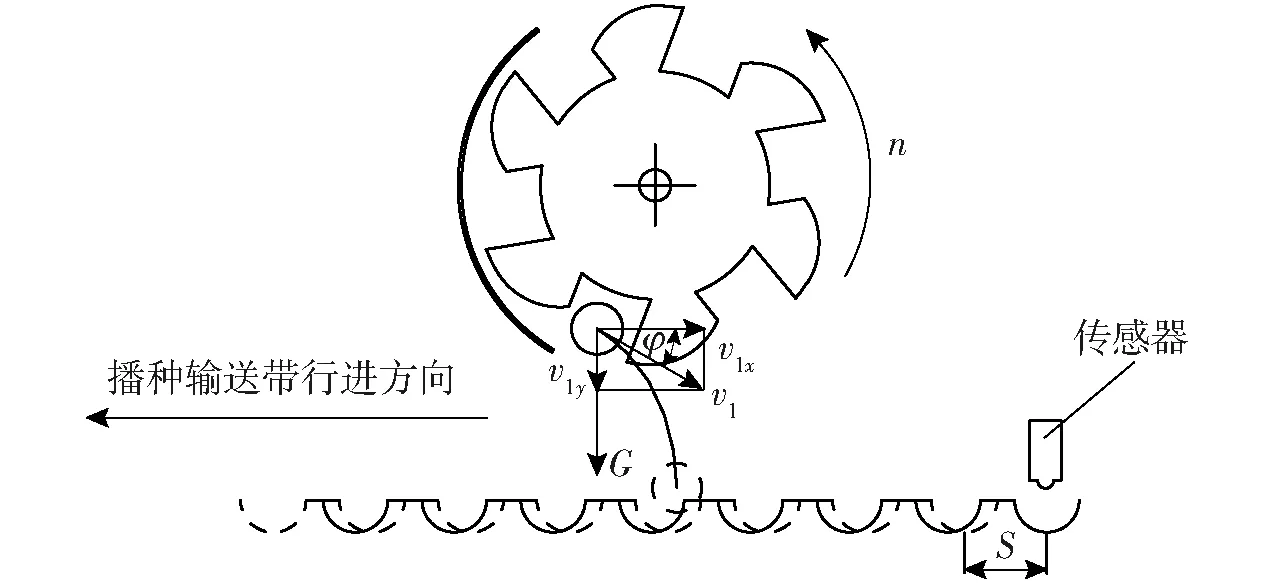
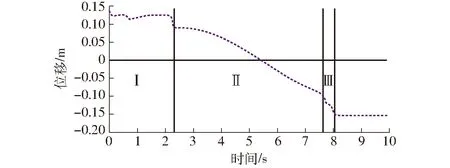
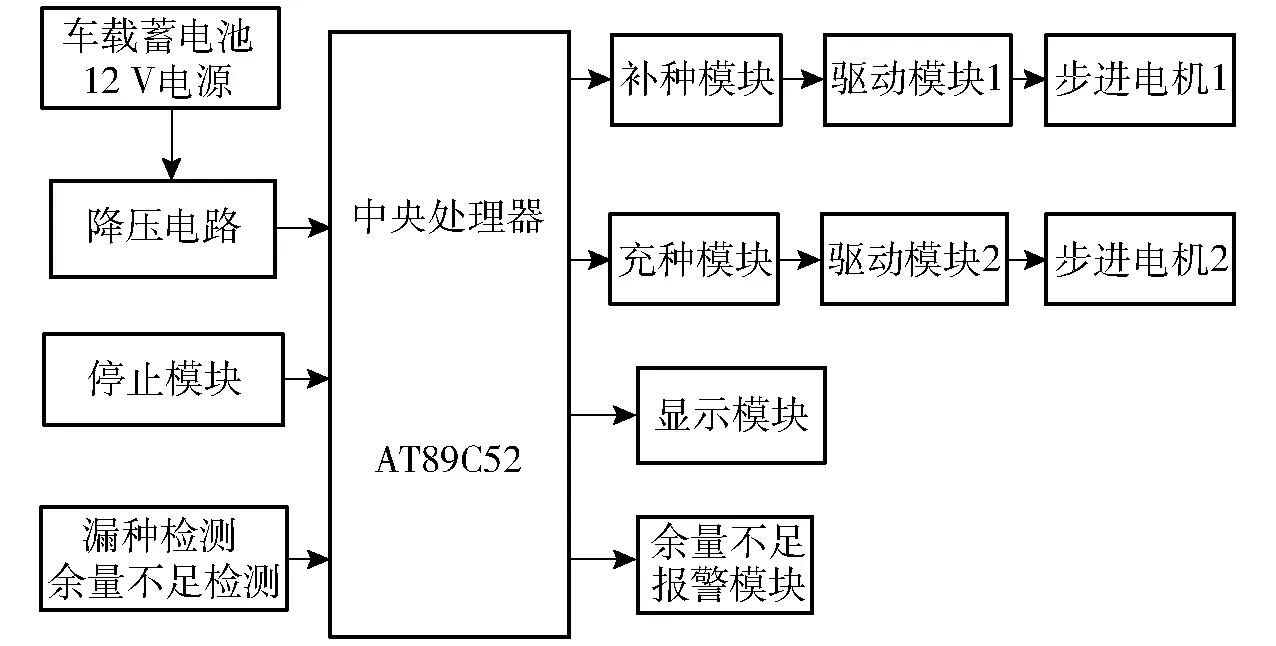
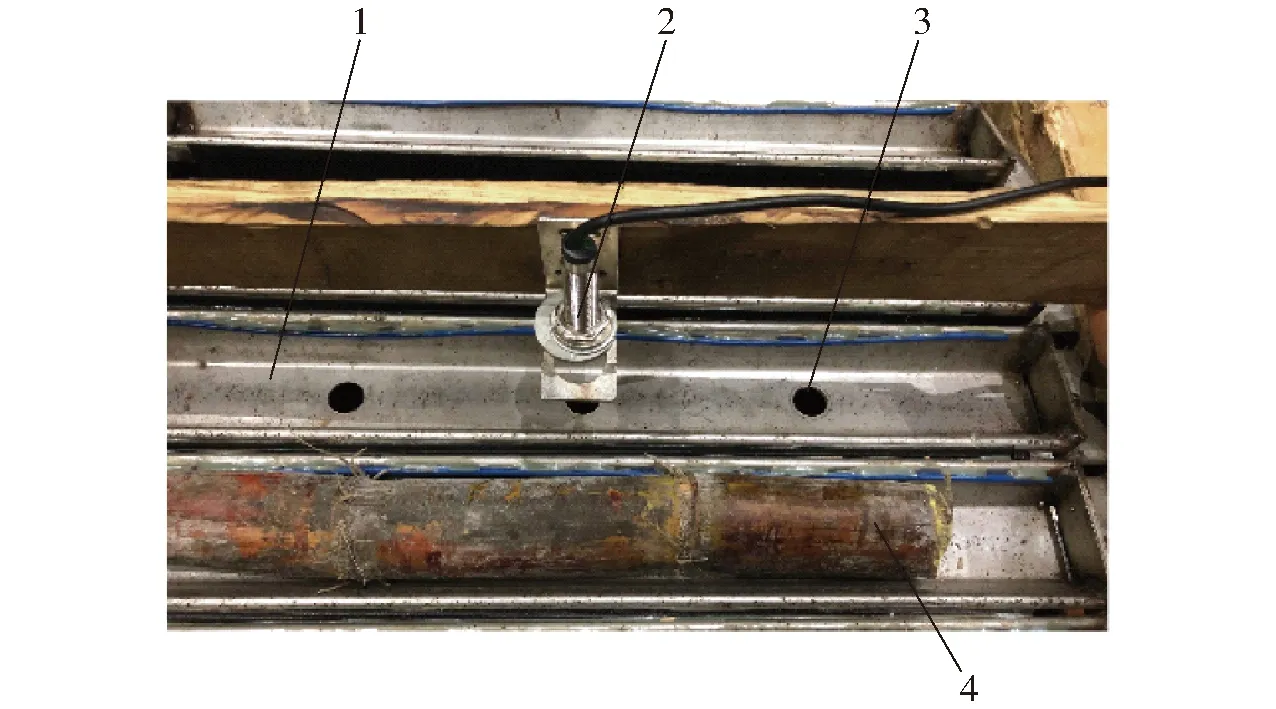
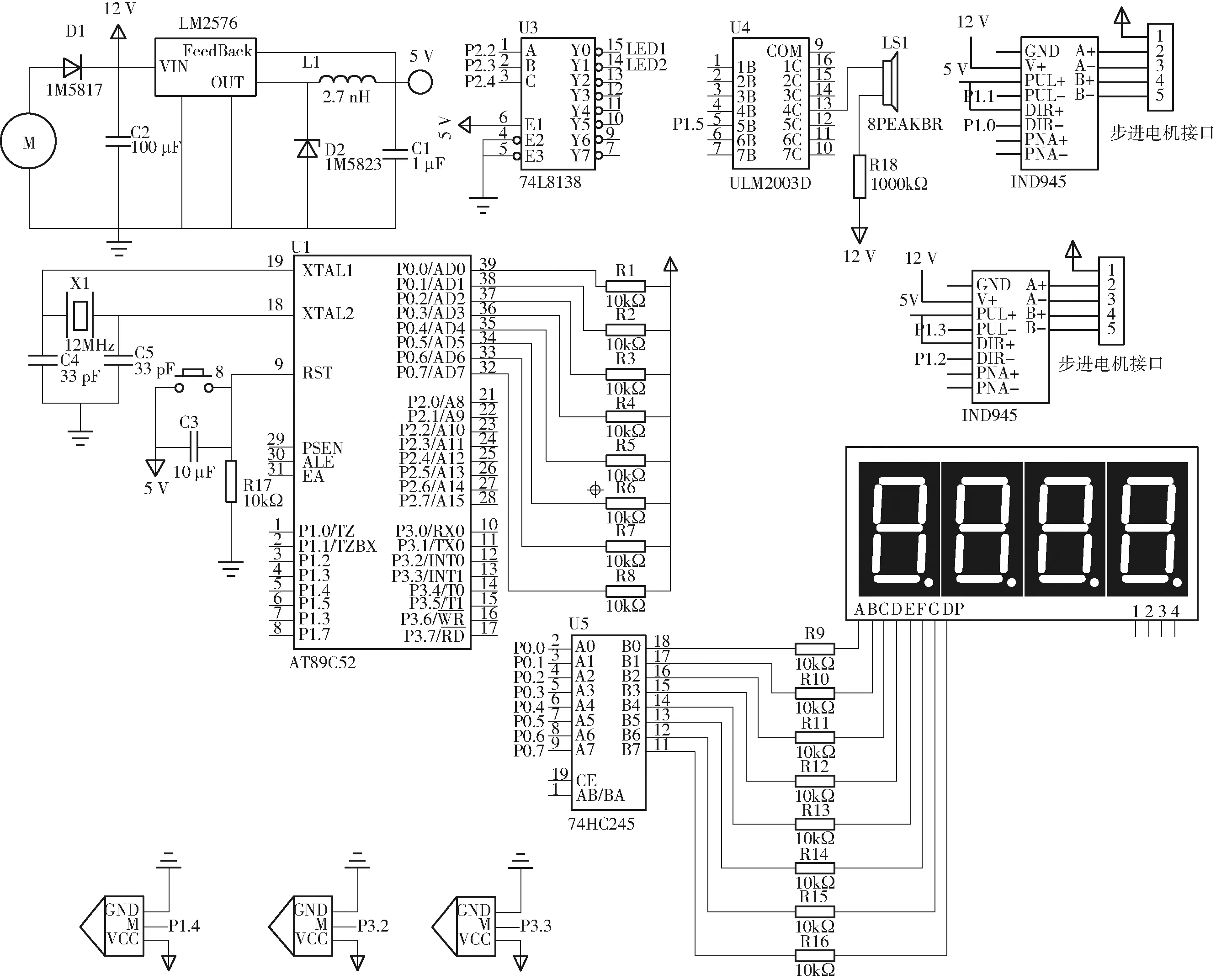
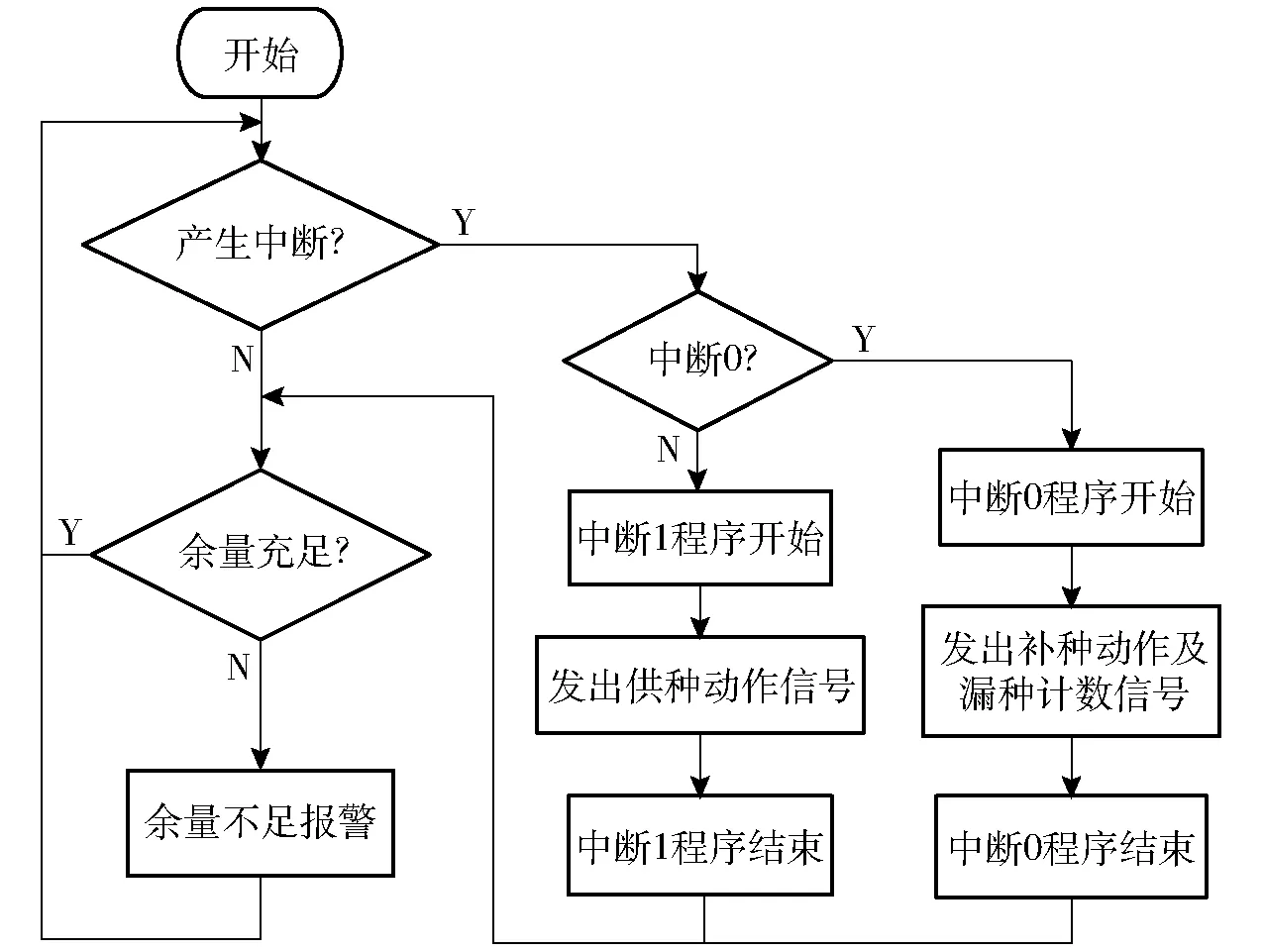
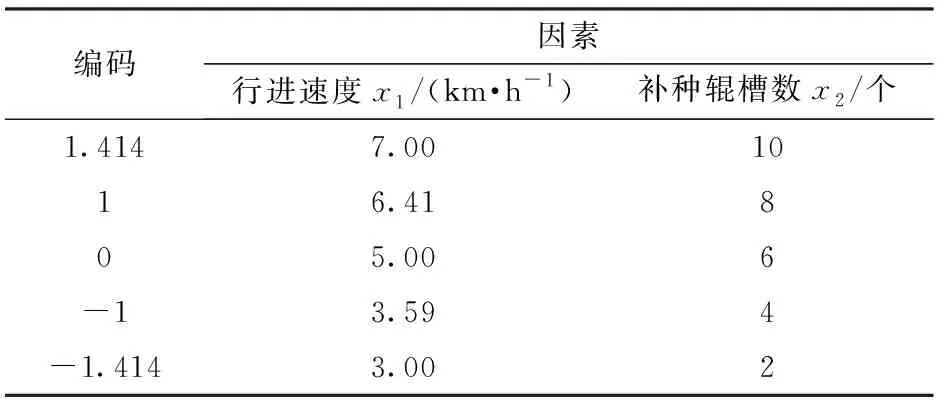
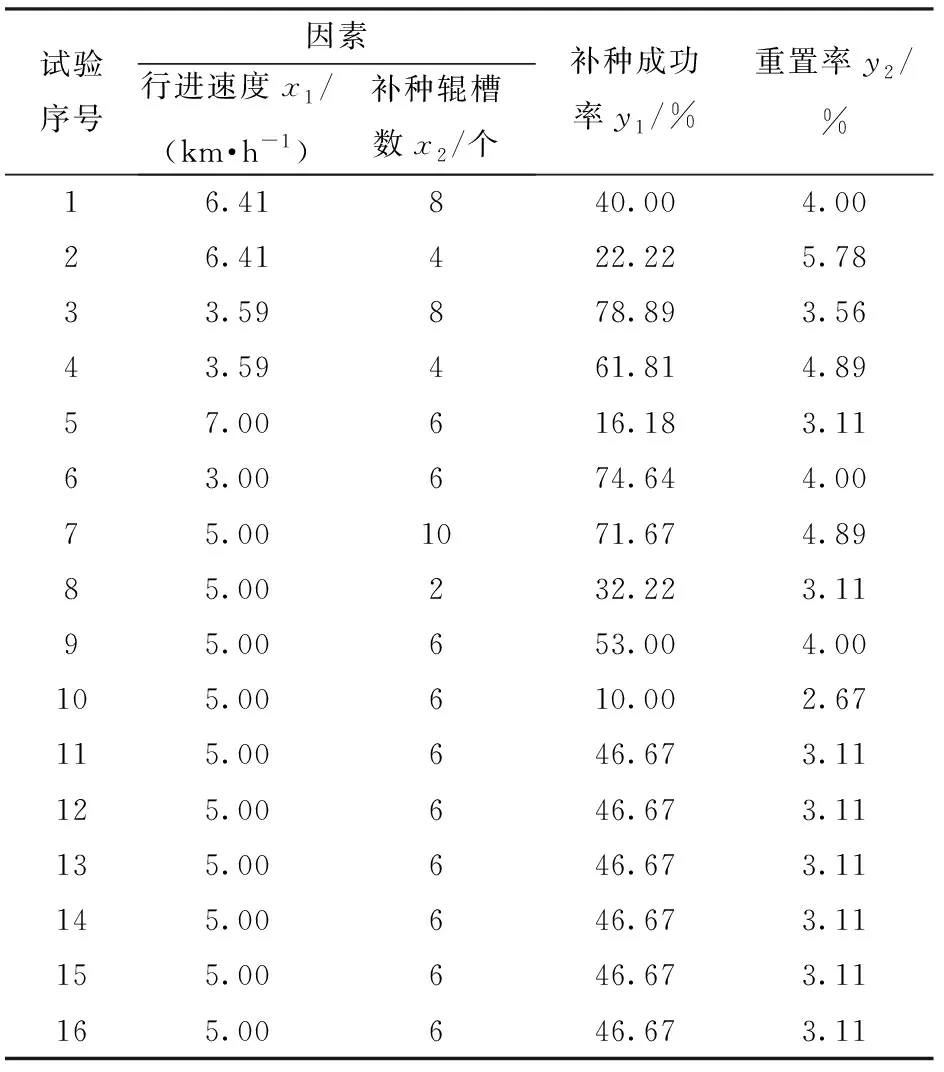
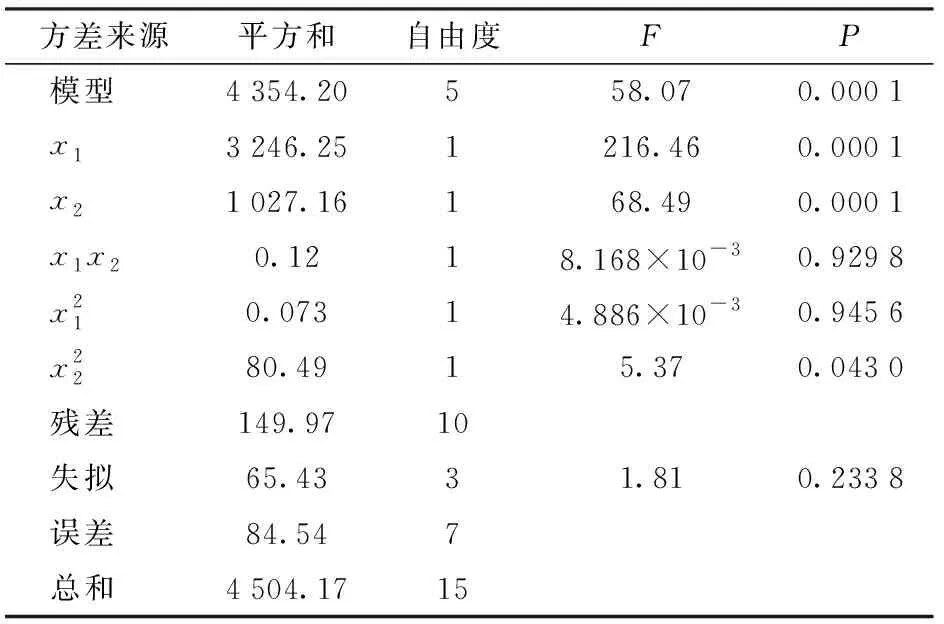
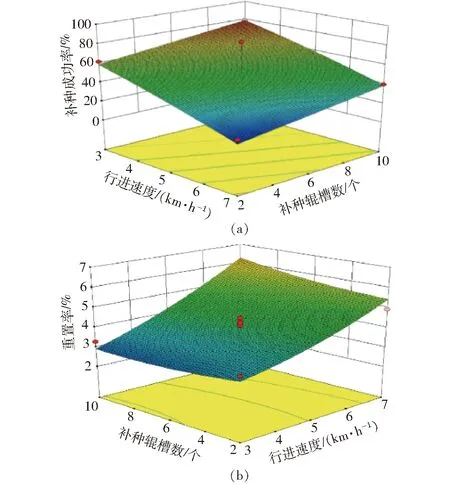
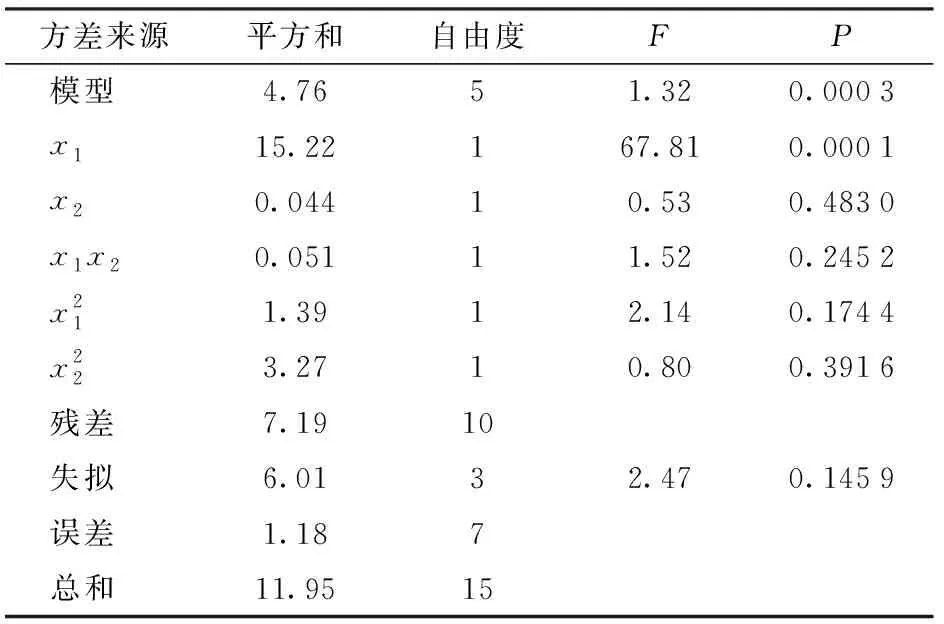
通过抽取150 kg甘蔗样品得到甘蔗最大直径dmax≈35 mm,dmin≈20 mm。考虑到蔗种挠度且预切种时已对蔗种挑选过,k≤0.1dmax,取3.5 mm。由式(3)计算得35 mm 2.2.2辊耙直径 排种轮直径的设计也尤为重要,设计得较大会导致排种器及其他部件增大;设计得太小会导致供种的困难。因此,排种轮直径设计时,既要满足种子良好的填充性能,又要保证相对紧凑合理的部件结构,考虑到补种辊耙上应同时有4个槽储备蔗种的要求,根据蔗种平均直径计算,本研究补种辊耙直径初定为200 mm[12]。 当补种辊耙工作时,储蔗槽中的蔗种沿辊耙的曲面滚动到辊槽中完成供种过程[13]。供种过程分析如图7所示。 图7 供种过程分析图Fig.7 Analysis diagram of seed supply process 蔗种在储蔗槽中的受力情况如下 G+F4cosβ=F3cosγ (4) f+F3sinγ+F4sinβ=F2 (5) 式中F2——储蔗槽对蔗种的作用力,N F3——辊耙对蔗种的弹力,N F4——蔗种间相互作用力,N f——辊槽对蔗种的摩擦力,N β——蔗种之间的作用力方向与竖直方向的夹角,(°) γ——蔗种对补种辊耙的弹力方向与竖直方向的夹角,(°) 随着辊耙的转动,蔗种沿辊耙槽的圆弧曲面滚动,同时F2也随之变化,最后落入到辊槽中完成供种过程。 当补种辊耙工作时,辊槽中的蔗种做圆周运动完成护种过程,避免过多的蔗种落入,确保补种的精确性。蔗种在补种辊槽中的受力分析如图8所示。 图8 护种过程分析图Fig.8 Analysis diagram of seed protection process 蔗种在辊槽中受力分析为 Gsinη=F5 (6) (7) 式中F5——补种辊槽对蔗种的弹力,N F6——导流板对蔗种的支持力,N F——提供蔗种做圆周运动的向心力,N η——向心力方向与竖直方向的夹角,(°) v——补种辊耙的转动线速度,m/s m——蔗种质量,kg R——补种辊耙半径,mm 对投种过程中蔗种进行运动学分析,蔗种在辊耙中做转速为n的旋转运动,蔗种在离开导流板瞬间,只受重力作用,使蔗种沿导流板切线方向以初速度v1做斜抛运动[14],其投种运动过程分析如图9所示。 图9 投种过程分析图Fig.9 Analysis diagram of seed feeding process 在忽略空气阻力影响下,对投种临界位置进行速度分析,受辊耙切向力的作用,蔗种经导流板投出的初速度为v1=2πRn。速度为 (8) 在重力作用下蔗种的运动轨迹为 (9) 将式(8)代入式(9)可得蔗种绝对运动轨迹为 (10) 式中x——正面水平方向位移,mm y——侧面竖直方向位移,mm g——重力加速度,m/s2 φ——蔗种经导流板投出的速度方向与水平方向的夹角,(°) t0——蔗种投送运动时间,s v1x——投种速度水平方向分量,m/s v1y——投种速度竖直方向分量,m/s 利用SoildWorks建立模型导入ADAMS中,仿真模型如图10所示。研究蔗种在辊耙储蔗槽和导流板作用下的受力情况及轨迹变化[15],位移-时间变化曲线如图11所示,加速度-时间变化曲线如图12所示。 图10 辊耙补种过程仿真模型Fig.10 Simulation model of roller rake replenishment process1.播种器输送带 2.补种辊耙 3.储蔗槽 4.导流板 5.蔗种 图11 位移-时间变化曲线Fig.11 Changing curve of displacement with time 图12 加速度-时间变化曲线Fig.12 Changing curve of acceleration with time 图11中Ⅰ、Ⅱ、Ⅲ分别代表供种、护种和投种过程,由图12可分析出,0.8~2.3 s时间段内,蔗种在辊耙槽的圆弧曲面滚动完成供种过程对应的合力由大变小,将集中力通过圆弧曲面分解,同时将蔗种耙入槽内,有效解决了卡蔗和堵蔗问题,仿真情况与理论分析一致,说明该补种结构设计合理。 控制系统以AT89C52单片机为控制中心,由电源模块、光电检测、中央处理单元、补种模块、数码管显示模块、蜂鸣报警模块等构成,补种控制系统硬件结构框图如图13所示。 图13 补种控制系统硬件结构框图Fig.13 Hardware structure block diagram of replenishment control system 其中,光电检测部分采用对射型激光传感器。该传感器的工作原理为:对射型光电传感器将光源发射器与接收器相对放置,工作时光线正常导通,当光线被遮挡时,接收器在未收到光线时输出信号[16]。当蔗种播种传送带正常工作时,光电传感器检测链槽中有无蔗种,将光照强度的变化转换成电信号[17],当链槽中有蔗种时传感器输出高电平,反之,传感器输出低电平,单片机判断该链槽漏种。根据实际需要本设计采用E3F-5DN1 NPN型激光传感器,补种检测控制装置实物图如图14所示。 图14 补种检测控制装置实物图Fig.14 Physical map of replenishment testing1.链槽 2.激光传感器 3.链槽孔 4.蔗种 当储蔗槽里蔗种不足时传感器输出低电平信号,单片机判断该储蔗槽余量不足,驱动供种电机动作,将预先切好的蔗种通过提升链槽传送到储蔗槽中,保证补种动作的正常进行,储蔗槽余量检测示意图如图15所示。 图15 供种检测示意图Fig.15 Replanting detection diagram1.提升链槽 2、6.蔗种 3.供种电机 4.激光传感器 5.储蔗槽 补种试验过程中,设从传感器位置到辊耙将蔗种导出投落到链槽的位置为S(m);蔗种通过辊槽转动1/N周掉落到链槽中,播种器输送带1的速度为v0(m/s),则延时时间为t2(s),计算式为 (11) 式中t1——完成一次补种所用时间,s t——从检测到漏种信号到补种完成所用时间,s 图16 单片机与外围电路连接电路Fig.16 Connecting circuit between single chip microcomputer and peripheral circuit T——补种辊耙转动周期,s N——补种辊耙槽数 控制系统中,单片机系统模块主要由单片机和外围电路组成。单片机作为该控制系统的主核心芯片,对传感器采集的信息具有处理分析的功能。AT89C52是一款高性能CMOS 8位单片机,4k字节FLASH闪速存储器,128字节内部RAM,32个I/O口线,2个16位定时/计数器,1个5向量两级中断结构,1个全双工串行通信口,片内振荡器及时钟电路[18]。其外围电路主要包括外部时钟电路、复位电路、电机驱动模块及步进电机等。单片机与外围电路连接图如图16所示。 补种系统的控制部分主要依靠激光传感器监测链槽漏种情况,在发生漏播时,步进电机启动开始执行补种作业,在集蔗槽出现余量不足时,步进电机执行供种作业,在集蔗箱余量不足时进行报警通知,相应的补种控制流程如图17所示。 图17 补种控制流程图Fig.17 Flow chart of supplementary control 本试验主要是对蔗种补种系统的补种性能进行检测,建立试验平台对系统进行试验,并测试其相关技术指标[19]。补种试验台实物图如图18所示。 图18 补种试验台实物图Fig.18 Physical photo of replenishment test-bed1.计算机 2.播种器 3.单片机控制系统 4.补种装置 5.示波器 6.电机 7.电机变频器 在试验过程中,补种装置固定在机架上,播种器输送带逆时针转动完成排种动作,通过摄像装置进行实时检测并采集数据,以实现准确测量各项性能指标。 试验材料为提前切好的蔗种段,放入蔗种框中,每框平均75根,将每框蔗种通过倾倒装置倒入播种器集蔗箱中进行排种,在播种器排种株距保持在30 cm内的情况下,当排种过程中出现漏种时进行补种试验,每次试验重复3次。播种器的输送带用电机模拟拖拉机的5个速度挡位,对应播种器输送带的5个行进速度。自主设计自动补种试验装置并搭建试验平台,以此为基础进行试验研究。试验选取行进速度x1和补种辊槽数x2两个因素,根据拖拉机行进挡位要求,确定影响因素取值范围为3~8 km/h、补种辊耙槽数2~10个,以补种成功率、重置率为指标。试验采用二因素五水平二次旋转正交组合设计试验。 补种成功率:在种植过程中,用摄像装置记录漏种(排种器输送带上的链槽中没有蔗种)次数和补种次数,补种成功率则为补种成功次数与漏种次数比值。每种试验重复3次,取平均值。其计算公式为 (12) 式中y1——补种成功率 n1——补种成功次数 H——漏种次数 重置率:在种植过程中,用摄像装置记录重置(排种器输送带上链槽中多补的蔗种)次数,重置率则为重置次数与每次试验所用蔗种的根数百分比。每种试验重复3次,取平均值。其计算公式为 (13) 式中y2——重置率n2——重置次数 M——每次试验所用蔗种的根数 4.3.1试验方案及结果 根据单因素试验研究结果,进一步研究补种辊槽数和行进速度两因素组合对补种装置补种性能的影响。固定提升电机转速为12.9 r/min,补种电机转速为12.9 r/min,补种轴高度为215 mm时[20-21],试验因素编码如表1所示(表中x2取值为圆整结果),试验方案与结果如表2所示。 表1 试验因素编码Tab.1 Coding of experimental factors 根据正交旋转试验所得的结果以及方差分析(表3)得,Fx1=216.46>F0.05(1,10)=4.96,P<0.01;由表3可得,Fx2=68.49>F0.05(1,10)=4.96,P<0.01。由此可知行进速度对补种成功率的影响为极显著,补种辊槽数对补种成功率的影响为极显著。 4.3.2两因素交互作用对性能指标的影响 通过Design-Expert 8.0.6软件对数据进行处理,得出行进速度和补种辊槽数对补种成功率和重置率的响应曲面如图19所示。 由图19a可知,当补种辊槽数一定时,随着行进速度的增大,补种成功率呈现降低的趋势;当行进速度一定时,随着补种辊槽数的增加,补种成功率显现上升的趋势。补种成功率最大值出现在行进速度为3.0 km/h处、补种辊槽数为10个处,行进速度对补种成功率的影响大于补种辊槽数的影响。 表2 试验方案与结果Tab.2 Test plan and experimental result 表3 补种成功率方差分析Tab.3 Variance analysis of success rate of replenishment 注:P<0.01表示差异极显著;0.01≤P≤0.05表示差异显著,下同。 图19 双因素响应曲面Fig.19 Two-factor response surface 图19b为重置率的双因素响应曲面。当补种辊槽数一定时,随着行进速度的增大,重置率呈现增加的趋势;当行进速度一定时,随着补种辊槽数的增加,重置率呈现缓慢增加的趋势,但是变化幅度较小。重置率最小值出现在行进速度为3 km/h、补种辊槽数为2个处,补种辊槽数对重置率无显著性影响,行进速度对重置率有显著性影响。 4.3.3验证分析及其优化 由Excel软件对全部试验数据进行二元二次回归分析可得回归方程模型 (14) 由表4可知,行进速度对重置率影响显著(P<0.01),其他项对重置率影响不显著(P>0.01),故剔除其他项后的方程为 y2=-3.58+1.758x1 (15) 由Excel规划求解求得最优解:行进速度为3 km/h、补种辊槽数为10个,得补种成功率为93.97%,重置率为1.69%,与图19所得分析结果一致。 (1)结合设计的甘蔗横向种植机,设计了一套基于51单片机控制的甘蔗实时补种系统,设计了分级传动的实时补种装置,通过光电传感器的实时检测和单片机控制,可实现漏种检测,并对甘蔗种植过程进行实时补种。 (2)以行进速度和补种辊槽数为试验因素,以补种成功率和重置率为补种性能指标,进行了二因素五水平正交旋转组合试验。试验结果表明,行进速度对补种成功率的影响极显著,补种辊槽数对补种成功率影响极显著;当行进速度为3 km/h、补种辊槽数为10个时,补种成功率为93.97%,重置率为1.69%。 (3)试验表明,仅通过播种器很难实现精准播种,而运用机电结合的方式可以较好地解决蔗种漏种的问题,实现漏种检测和实时补种,从而提高甘蔗的播种率。2.3 供种过程分析
2.4 护种过程分析
2.5 投种过程分析
2.6 辊耙补种过程仿真分析

3 补种控制系统设计
3.1 漏种检测系统组成与检测原理
3.2 自动供种原理
3.3 自动补种原理
3.4 硬件设计
3.5 软件设计
4 台架试验与结果分析
4.1 补种试验台

4.2 试验内容与方法
4.3 多因素试验及结果分析

5 结论