推土机工作装置自动控制研究
2020-03-09姜友山
姜友山
(山推工程机械股份有限公司,山东 济宁 272023)
推土机作业工况复杂,所受作业载荷不断变化,若负载较大,超过了推土机的附着力,推土机的履带将会出现打滑现象,通常履带打滑要求不超过12%,履带打滑程度过大,不但不利于推土,而且会对履带造成很大损伤。此时操作者会适量提升工作装置(铲刀或松土器)切土深度,来降低负载,以保证推土机正常作业。若负载较小,无法保证铲刀满铲或松土器满载荷时,整机作业生产率降低,此时操作者会下降工作装置切土深度,来增加负载,以保证推土机满负荷推土。在复杂的作业条件下,操作者需不断地调整工作装置的切土深度,增加了劳动强度,并且不同的操作者,由于操作水平的差异,对推土质量影响很大。因此,非常有必要对工作装置进行自动控制。
1 工作装置自动控制原理
推土机工作装置通常是基于滑转率来进行自动控制的,但此种方法不能保证整机作业生产率始终位于高效区。故本文以变矩器传动比作为控制目标,在变矩器处于高效区基础上,实现工作装置的自动控制。
液力机械式推土机配置的液力变矩器的效率曲线示意图如图1 所示。横坐标为液力变矩器的传动比,其大小为变矩器的涡轮转速与泵轮转速之商;纵坐标为液力变矩器效率。由图1 可以看出,变矩器的效率曲线近似于抛物线,最高效率时对应一个固定的传动比,在最高效率附近取较高效率范围(接近于最高效率点),则会对应一个固定的变矩器传动比范围(i1~i2)。若将控制目标设定为i1~i2之间,那么变矩器在控制目标范围内的效率必处于高效区(最高效率附近)。而液力变矩器的效率决定了整机的输出功率,若变矩器始终处于高效区,则会提升整机作业生产率。

图1 变矩器效率曲线
2 推土机工作装置自动控制策略
图2为推土机工作装置自动控制系统示意图。
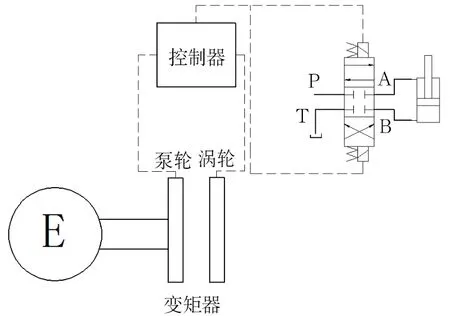
图2 推土机工作装置自动控制系统示意图
发动机通过万向节等机械结构与变矩器相连,变矩器涡轮通过变速箱等传动机构将功率传递至驱动轮。对于电控发动机,发动机转速可以通过终端直接读出,对于一般发动机,其转速可以通过对发电机脉冲数进行检测而获得。发动机转速乘以机械部分传动比,就得到变矩器泵轮转速。利用安装在传动系统输出轴上的转速传感器,可以检测到变矩器涡轮转速。推土机工作时,复杂多变的外负载,会影响变矩器涡轮转速。负载增大,涡轮转速降低,变矩器输出扭矩增大;负载减小,涡轮转速较高,变矩器输出扭矩减小。
作业时,实时采集变矩器泵轮和涡轮转速,并将所测得的转速输入到控制器,控制器将进行如下计算

i为变矩器的传动比;nw为变矩器泵轮转速;nb为涡轮转速。
2.1 作业时负载增大
若作业时负载增大,整机输出扭矩增大,液力变矩器涡轮转速降低,在发动机转速不变的情况下,变矩器传动比i将减小,变矩器传动比i<i1时,控制器将发出指令,图2 中上部电磁阀通电,驱动工作装置油缸的有杆腔充油,工作装置切土深度减小,外负载减小,变矩器涡轮转速就会增加,从而使变矩器传动比增加,直至变矩器传动比i重新升至i1~i2范围内,图2 上部电磁阀断电,驱动工作装置油缸的有杆腔停止充油,工作装置切土深度停止减小。
2.2 作业时负载减小
若作业时负载减小,整机输出扭矩减小,液力变矩器涡轮转速增加,在发动机转速不变的情况下,变矩器的传动比i将增加,变矩器传动比i>i2时,控制器将发出指令,图2 中下部电磁阀通电,驱动工作装置油缸的无杆腔充油,工作装置切土深度增加,外负载增大,变矩器涡轮转速就会降低,从而使变矩器传动比减小。直至变矩器传动比i重新降至i1~i2范围内,图2 中下部电磁阀断电,驱动工作装置油缸的无杆腔停止充油,工作装置切土深度停止增加。
3 结语
推土机工作装置自动控制时,以变矩器高效区对应传动比作为控制目标,若变矩器传动比i不在i1~i2范围时,控制器将发出相应指令,控制三位四通电磁阀相应侧电流的通断,使得驱动工作装置的油缸自动伸缩调节,实现自动控制,最终使得变矩器传动比恢复到控制目标范围内,保证变矩器效率始终在最高效率附近。