传感器感知盲区条件下智能汽车主动制动系统控制研究
2020-03-09袁朝春何友国SHENJie翁烁丰
袁朝春 王 桐 何友国 SHEN Jie 陈 龙 翁烁丰
(1.江苏大学汽车工程研究院, 镇江 212013; 2.密歇根大学迪尔本校区, 迪尔本MI 48128)
0 引言
无人驾驶汽车的安全性一直是智能汽车领域研究人员高度关注的问题[1-3]。汽车主动避撞系统是无人驾驶汽车实现纵向安全的关键部件,其利用车载传感器(雷达、摄像头等)对行驶环境进行感知,在安全距离模型的基础上对车辆行驶的安全风险进行判断,并据此对车辆制动系统进行控制。行驶安全风险的准确判断是提高无人驾驶车辆安全性的关键环节。众多学者进行了研究,提出以安全距离模型为判断追尾碰撞风险的算法,如基于车辆制动过程运动学分析的安全距离模型[4]和基于车间时距的安全距离模型[5-6]。通过这些模型,智能汽车可以准确判断与可检测交通参与者之间的安全状态,以防止追尾碰撞[7]。但是,在弯道、交岔路口等道路环境下,由于高大树木、建筑物等遮挡,使智能汽车在一定范围内存在传感器感知盲区。在感知盲区内,智能汽车不能及时发现可能存在的潜在交通事故风险,使该类潜在交通事故呈现出潜伏性和突发性等特点,现有安全距离模型对感知盲区内潜在交通事故进行规避存在一定的局限性。
目前,研究人员逐渐意识到感知盲区对智能汽车安全行驶的影响,美国、日本、韩国以及国内清华大学、同济大学等尝试利用车联网[8-9]或ITS系统[10-11]解决这一问题,研究工作已取得很大进展。但是,由于成本及建设进度的影响,对智能汽车自动驾驶而言,传感器感知盲区潜在交通事故风险具有不可直接观测、动态变化及不确定的特点,基于车载传感器的信息不能直接检测盲区潜在交通事故风险,必须基于人工智能算法挖掘潜在交通事故的风险特征[12]。
本文基于车载传感信息,以电子机械制动系统(EMB)为平台,将传感器感知盲区进行分类并建模,预测感知盲区内潜在障碍物的运动趋势,建立传感器感知盲区主动避撞安全距离模型,对感知盲区内由潜在障碍物造成的潜在交通事故风险进行预判,揭示传感器感知盲区潜在交通事故风险演化及规避机理,防止传感器感知盲区内因障碍物的突然出现造成安全距离不足而引起的碰撞事故。
1 制动系统建模
采用的EMB执行器包括永磁直流力矩电机、行星齿轮系统、滚珠丝杠等,按照结构特点可以将EMB执行器数学模型分为驱动电机模型、电机摩擦模型、传动机构模型以及负载模型4部分。主动避撞制动系统通过对传感器感知盲区的识别获取外界环境信息,通过车载传感器获取整车信息,然后根据传感器感知盲区安全距离模型判断主动避撞制动系统的开启与关闭,对电机进行实时控制,从而实现对无人驾驶汽车的动力控制。EMB执行器控制原理如图1所示。
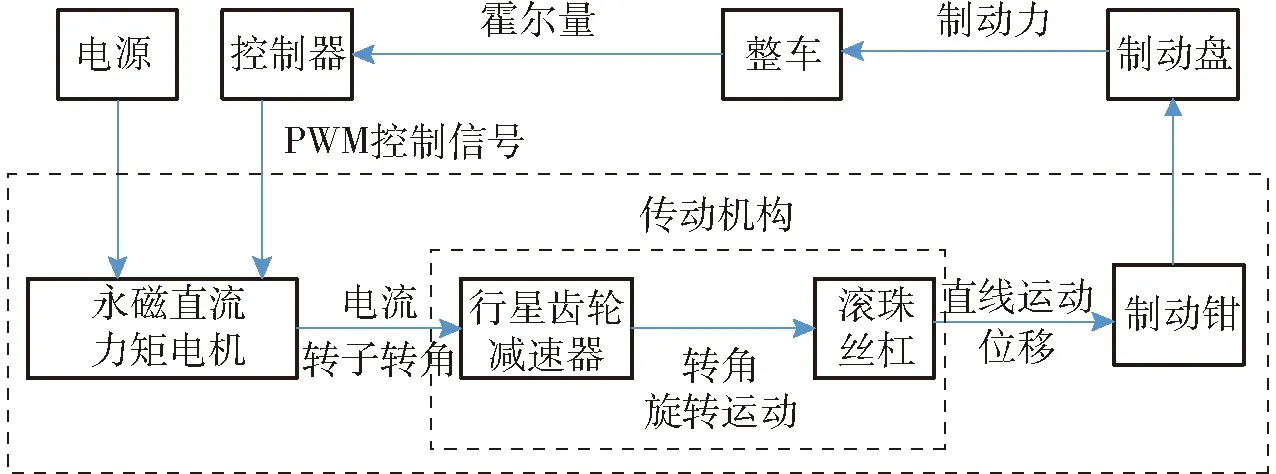
图1 控制原理图
1.1 电动机模型
EMB驱动电机为永磁直流力矩电机,假设不考虑电刷的机械换向对电机运行产生的影响,电机等效模型如图2所示[13]。
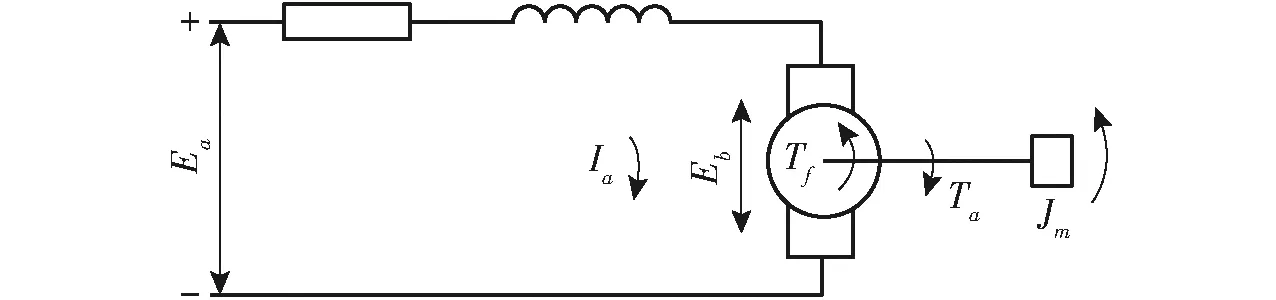
图2 电动机工作原理图
电机工作时,各物理量存在如下关系
(1)
式中Ea——电枢电压,VIa——电枢电流,A
Ra——电枢电阻,Ω
La——电枢电感,H
Eb——反电动势,V
KE——反电动势系数,V·min/r
θm——电动机转角,rad
wm——电动机转速,r/min
Jm——等效转动惯量,kg·m2
Te——电动机电磁转矩,N·m
TF——电动机摩擦转矩,N·m
TL——负载转矩,N·m
KT——电动机转矩系数,N·m/A
1.2 电机摩擦模型
机电系统中的摩擦力会严重影响系统的控制性能,本文选用能够可靠描述摩擦力负阻尼特性的Stribeck摩擦模型[14],数学表达式为

(2)
式中Tc——库伦摩擦力矩,N·m
Ts——最大静摩擦力矩,N·m
ω——电机角速度,rad/s
ωs——Stribeck角速度,rad/s
Bv——黏性摩擦因数
1.3 传动机构模型
EMB传动机构主要包括行星齿轮减速器和滚珠丝杠,行星齿轮架构模型为[15]
θ=θm/i
(3)
式中θ——行星齿轮机构输出转角,rad
i——行星齿轮机构减速比
滚珠丝杠数学模型为
(4)
式中Ph——滚珠丝杠机构导程,mm
x——滚珠丝杠螺母位移,mm
1.4 负载模型
根据EMB执行器实物试验测量结果,通过曲线拟合得到多项式系数,制动夹紧力与滚珠丝杠螺母位移满足关系
(5)
式中FN——制动夹紧力,N
制动夹紧力FN通过滚珠丝杠和行星齿轮减速器反向作用于驱动电机,产生驱动电机的负载转矩TL,可得
(6)

ηs——滚珠丝杠机构机械效率
Tg——行星齿轮机构输出转矩,N·m
TL——电机负载转矩,N·m
ηg——行星齿轮机构机械效率
EMB采用浮动钳盘式制动器,假设制动盘两侧受到的摩擦均匀,则制动器制动力矩为
Tμ=2FNμpRb
(7)
式中Tμ——制动器制动力矩,N·m
μp——制动块摩擦因数
Rb——制动盘有效摩擦半径,mm
2 传感器感知盲区
在无人驾驶汽车领域,现有主动安全技术都是基于环境感知传感器可感知到的障碍物进行主动避撞算法的研究。但是,由于传感器工作原理和外界环境的限制,在无人驾驶汽车实际行驶过程中,极易产生传感器感知盲区,传感器感知盲区内可能存在的障碍物对无人驾驶汽车的行驶安全造成巨大影响。
2.1 无人驾驶汽车环境感知传感器
智能驾驶系统构成如图3所示,主要分为环境感知、规划决策、控制执行三部分。
其中,对道路环境的良好感知是智能汽车安全行驶的前提[16]。智能驾驶领域内的环境感知研究主要是识别道路环境信息,挖掘其中影响智能汽车行驶安全的信息,智能驾驶系统中的环境感知传感器主要包括:车载摄像头、毫米波雷达、激光雷达等。
在智能驾驶感知模块中,摄像头是必不可少的关键硬件,所用摄像头主要有单目摄像头和双目摄像头。车载摄像头能够识别智能汽车驾驶环境中的多种物体,随着机器视觉的快速发展,图像处理算法的速度和识别目标物体的准确度都得到了很大的提升。现有算法基于摄像头可识别的障碍物进行主动避撞,本文则对摄像头不可直接观测的传感器感知盲区内可能存在的隐藏障碍物进行危险程度预测和评估。
智能汽车所用毫米波雷达的主要任务是探测障碍物目标的相关信息,包括相对位置、相对速度等。毫米波雷达通过天线接收目标反射的毫米波信号,处理后获取前方道路环境信息,对毫米波感知到的物体信息进行追踪和分类。毫米波雷达的工作方式决定了该传感器在复杂道路环境中会产生传感器感知盲区。
激光雷达是一种发送激光束获取探测目标位置、速度等特征量的主动探测技术。激光雷达能够对整个行驶环境进行3D建模,能够更加清晰地表明环境特征。若障碍物被树木、建筑物等遮挡,激光雷达也不能将其准确识别。
综上所述,在复杂道路环境下,若障碍物被高大树木、建筑物等遮挡,环境感知传感器不能准确识别传感器感知盲区内可能存在的障碍物,存在安全隐患,影响智能汽车的安全行驶。
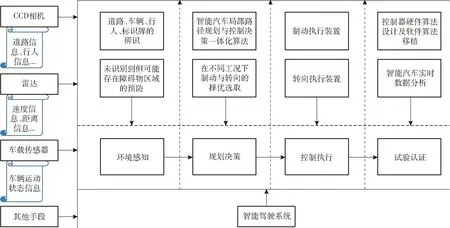
图3 智能驾驶系统
2.2 传感器感知盲区定义
在复杂道路环境下,由于高大树木、建筑物的遮挡,环境感知传感器不能准确感知到障碍物,智能汽车在一定范围内会出现传感器感知盲区,图4为典型的传感器感知盲区场景。
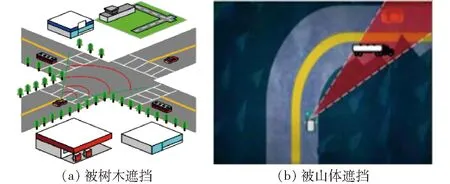
图4 典型传感器感知盲区
传感器感知盲区是无人驾驶汽车交通事故频发的主要原因之一,需要对传感器感知盲区进行数据挖掘分析,寻找其运动变化特征,从而做出对应的主动避撞控制策略,提高车辆和行人的安全指数。
2.3 传感器感知盲区识别和分类
卷积神经网络(Convolutional neural networks, CNN)是一种前馈式神经网络,常被用来研究二维图像识别问题,且仅需少量的预处理,识别范围广,能容许图像的畸变,已成功应用于手写字符识别、人脸识别、人眼检测、行人检测、机器人导航[17-19]。在智能车领域中该网络能够对传感器感知盲区进行识别并分类,具有较强的实时性和应用性。
鉴于在对传感器感知盲区进行卷积神经网络识别和分类时,需要大量具有特殊感知盲区特征的图像作为样本,本文在城市典型道路工况下拍摄具有感知盲区特征的图像,预处理后建立感知盲区数据库,并利用preprocessing函数扩展数据库数量为56 000幅,如图5、6所示。

图5 传感器感知盲区图像

图6 传感器感知盲区数据库
依据传感器感知盲区的特征搭建用于识别并分类传感器感知盲区的卷积神经网络,整体网络框架如图7所示。
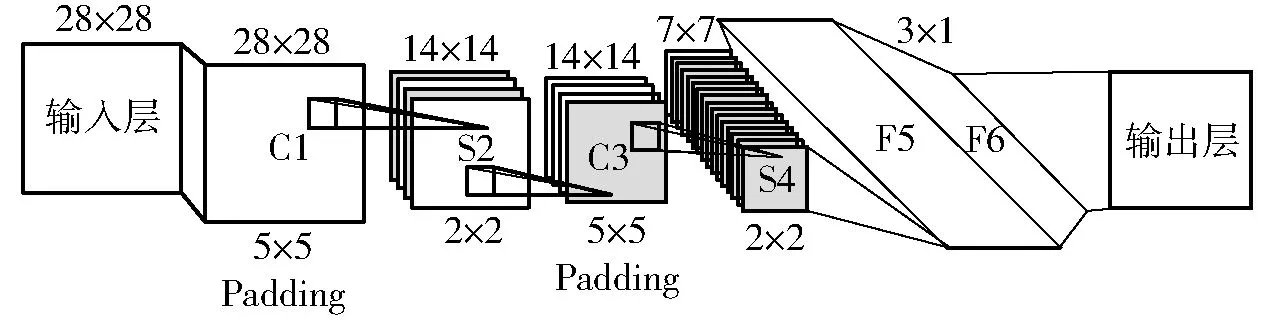
图7 卷积神经网络框架
传感器感知盲区多存在于多岔路口、十字路口、弯道等道路环境,道路特征与路边环境特征有明显的分界线。为提取分界线特征,搭建包含1个输入层、2个卷积层、2个池化层、2个全连接层和1个输出层在内的7层卷积神经网络。
在输入层,将感知盲区图像进行预处理并将其二值化,保存为数组,为降低算法运行时间,图像尺寸设置为28像素×28像素。输入时对数组进行读取,并且利用train_test_split函数将数据分割为训练集和测试集,70%为训练集,30%为测试集。
在2层卷积层,根据输入层图像尺寸和特征情况,选择合适的卷积核和卷积步长,并用padding函数使图像尺寸保持不变。卷积核尺寸为2像素×2像素。卷积步长为1像素×1像素。
在2层池化层,根据RGB通道中白色数值为最大值255,选择最大池化函数max_pool,选择合适的池化核和池化步长。池化核大小为2像素×2像素,池化步长为1像素×1像素。
在全连接层,根据对传感器感知盲区的特征分析,确认有3种类型的传感器感知盲区,定为prediction={0,1,2}。
算法中偏置设置为0.1,权重初始设为从截断的正态分布中输出随机值,在算法中的每一层进行迭代计算。
卷积神经网络将数据库的训练数据循环训练1 000次,并且对测试数据进行测试,利用compute_accuracy函数通过比对全连接层的输出prediction和测试数据标签计算识别成功率。
本文搭建的传感器感知盲区卷积神经网络因数据库的复杂程度较高,在经过算法的优化后,识别成功率达84%,识别单幅图像仅需0.2 s。
3 主动避撞算法
由于传感器感知盲区内潜在障碍物具有不可直接观测的特性,本文将传感器感知盲区与可感知区域的边界线作为敏感区域,采集具有传感器感知盲区特征的图像建立感知盲区数据库,分析其运动特征对其进行分类并预测潜在障碍物的位置和运动状态,建立传感器感知盲区条件下的主动避撞安全距离模型,设计传感器感知盲区条件下主动避撞算法。
3.1 传感器感知盲区特征分析
根据感知盲区的运动变化趋势分析无人驾驶汽车环境感知范围的变化趋势,并将传感器感知盲区分为渐开式感知盲区、跟随式感知盲区和综合式感知盲区。
(1)渐开式感知盲区
渐开式感知盲区多存在于交岔路口道路环境中,图8为渐开式感知盲区示意图,图9为渐开式感知盲区视野增益图。由图可知,智能汽车在行驶过程中感知区域的变化和遮挡物的具体位置密切相关,渐开式感知盲区中,遮挡物的位置固定不变,X1、X2分别为渐开式盲区左右两侧的固定遮挡物。智能汽车以车速v从位置1行驶到位置2时,在相同时间间隔下,分析感知盲区边界线的运动距离,如图中ΔS1、ΔS2、ΔS3所示。经分析,盲区边界线的运动状态近似为匀加速运动。
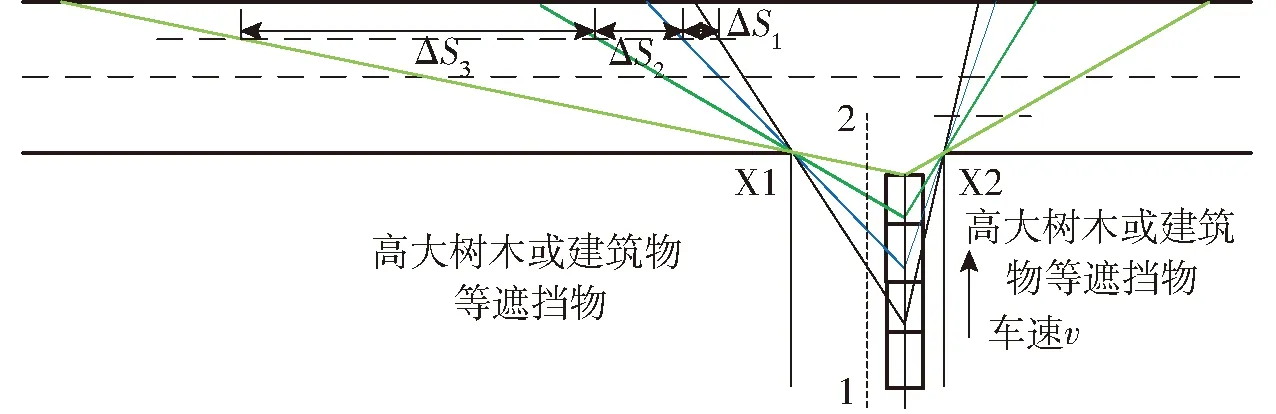
图8 渐开式感知盲区示意图

图9 渐开式感知盲区感知区域增益
本文构建了符合实际情况的交岔路口道路环境,研究分析了盲区边缘线的运动状态。所建交岔路口为标准公路双车道,智能汽车行驶在车道正中间。传感器感知盲区边缘线的运动状态为

(8)
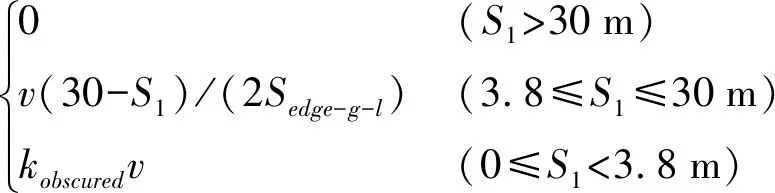
(9)
式中vobscured-g-r——右转时渐开式感知盲区边缘线的运动速度,m/s
vobscured-g-l——左转时渐开式感知盲区边缘线的运动速度,m/s
Sedge-g-r、Sedge-g-l——右转或左转时感知盲区边缘线运动距离,m
S1——无人驾驶汽车与交岔路口的相对距离,m
kobscured——评价系数,表征传感器感知盲区边缘线运动速度远大于车速
以右转为例分析感知盲区边界线运动速度。在无人驾驶汽车与交岔路口之间的相对距离较大时,即S1>30 m,感知盲区边缘线基本保持不变,本文拟将其作为道路中的固定障碍物处理,即vobscured=0,感知盲区边缘线与智能汽车的相对距离不断缩短;在CAD中建立假设的道路环境,对其进行数据分析,当无人驾驶汽车与交叉路口相距1.7 m时,感知盲区边界线的运动速度与智能汽车相等,如图10所示。
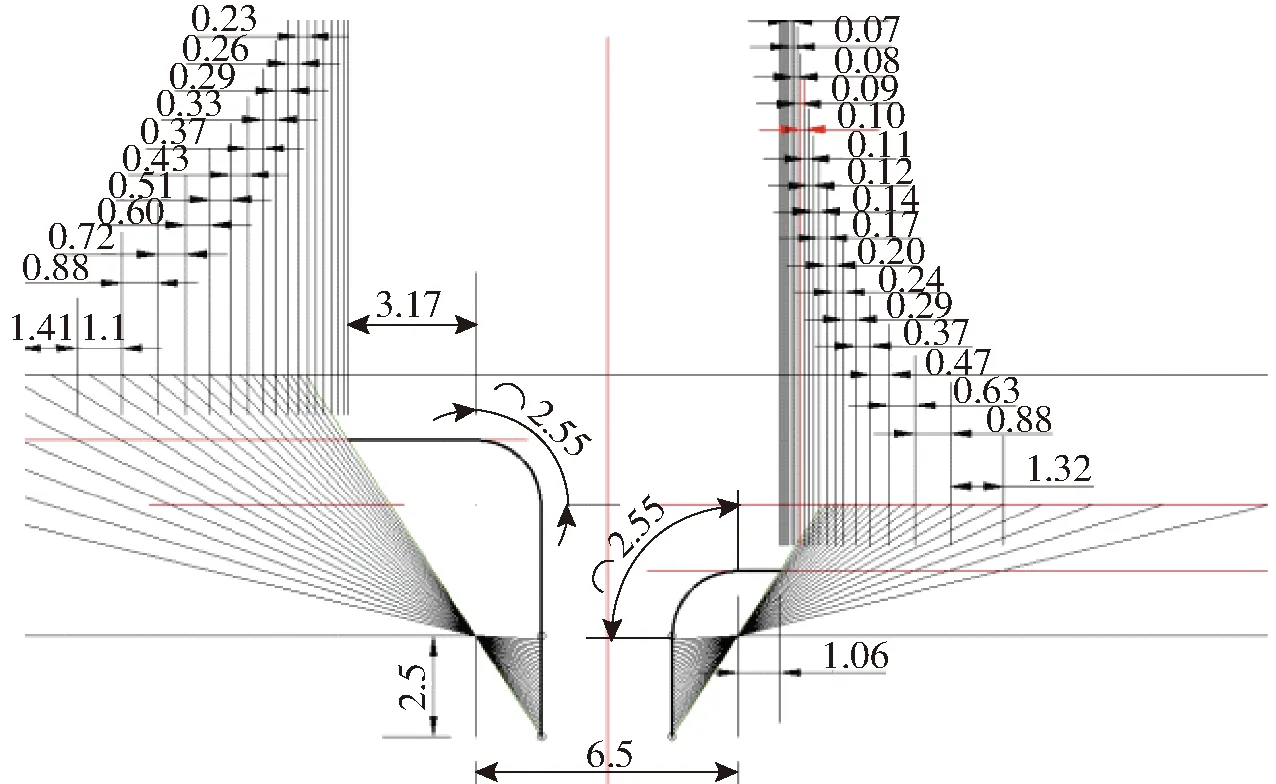
图10 感知盲区数据分析
当无人驾驶汽车与交岔路口的相对距离1.7 m≤S1≤30 m时,感知盲区边缘线开始以加速的方式运动。本文拟将其作为正在进行匀加速运动的障碍物处理,感知盲区边缘线运动状态为
vobscured-g-r=v(30-S1)/(2Sedge-g-r)
(10)
vobscured-g-l=v(30-S1)/(2Sedge-g-l)
(11)
当智能汽车与交岔路口的相对距离0≤S1<1.7 m时,感知盲区边缘线的速度将远大于车速,感知盲区边缘线与无人驾驶汽车的相对距离将逐渐增大。若感知盲区边缘线与无人驾驶汽车的相对距离远大于安全距离,则传感器感知盲区将不会对智能汽车的正常行驶造成影响。
(2)跟随式感知盲区
跟随式感知盲区(图11)多存在于弯道道路环境中,跟随式感知盲区感知区域增益如图12所示。由图可知,智能汽车在行驶过程中感知区域的变化和遮挡物的位置并无太大的关联,感知范围基本保持不变,图中Y1、Y2分别为不同时刻遮挡物的位置。

图11 跟随式感知盲区示意图

图12 跟随式感知盲区感知区域增益
无人驾驶汽车以车速v从位置1行驶到位置2处,车辆环境感知区域在等间隔时间内基本没有发生变化,即在此道路环境中,传感器感知盲区的边界线跟随无人汽车行驶速度变化而变化,两者速度基本保持一致,vobscured-f=v。
无人驾驶汽车在该类传感器感知盲区行驶过程中,当前方感知盲区边界线处突然出现障碍物,若无人驾驶汽车只采取现有安全距离模型,会因制动距离不够而导致追尾碰撞事故;若智能汽车将前方感知盲区敏感区域作为疑似障碍物进行主动避撞控制,根据传感器感知盲区边缘线的运动变化控制车速,与传感器感知盲区边界线保持一定的安全距离,则能够避免传感器感知盲区内突然出现的障碍物对无人驾驶汽车的安全造成不可挽回的影响。
在无人驾驶汽车即将通过弯道时,感知盲区的范围将会发生突变。此时,若传感器未感知到前方存在障碍物,可以在一定的范围内提高车速安全通过传感器感知盲区,既保证了车辆的主动安全性能,又能适当提高道路通过率。
(3)综合式感知盲区
综合式感知盲区综合上述两类感知盲区的特点及变化趋势,如图13所示,左侧为渐开式感知盲区,右侧为跟随式感知盲区。在智能汽车行驶过程中,应考虑这两种盲区同时存在的情况,且应根据当时的车速情况、行驶目的信息(左转或者右转)判定综合式中两类感知盲区的优先级,在避免碰撞到其他障碍物的同时,也要避免成为其他交通参与者的障碍物。

图13 综合式感知盲区
若智能汽车需要左转通过路口,由于右侧为跟随式感知盲区,右侧的视野区域基本保持不变,在保持右侧安全距离的同时,优先考虑左侧渐开式感知盲区;若智能汽车右转通过路口,此时,着重考虑右侧跟随式感知盲区。但是,这种情况下,无人驾驶汽车还需避免成为左侧车道中的道路参与者行驶路线上的障碍物。参照上述标准控制智能汽车的速度,研究性能相对较好的传感器感知盲区主动避撞算法,提高无人驾驶汽车的主动安全性能。
3.2 传感器感知盲区安全距离模型
由于传感器感知盲区的存在降低了无人驾驶汽车的行驶安全性,提出了一种改进的应用于弯道和交岔路口等潜在交通事故风险较大区域的传感器感知盲区安全距离模型。该模型假设传感器感知盲区内存在障碍物,以此将传感器感知盲区边缘线作为可移动障碍物进行主动避撞。由于不同类别的感知盲区边界线有不同的运动状态,且安全制动距离与边界线的运动状态有关,故本文引用基于前车状态的安全距离模型[20],进一步对跟车的安全距离进行计算。传感器感知盲区安全距离模型拟将盲区边界线作为运动障碍物存在,会极大地缩减制动反应时间,提高智能汽车的主动安全性。
(1)渐开式盲区
由式(10)、(11)可知,当智能汽车与三岔路口的相对距离在1.7~30 m范围内时,传感器感知盲区边界线的运动加速度为
aobscured-g-r=v2/(2Sedge-g-r)
(12)
aobscured-g-l=v2/(2Sedge-g-l)
(13)
式中aobscured-g-r、aobscured-g-l——右侧或左侧渐开式感知盲区边缘线的运动加速度,m/s2
此时,无人驾驶汽车以车速v行驶,实际情况中盲区边缘线运动状况不完全符合匀加速运动,故盲区边缘线加速度取较小值,渐开式感知盲区安全距离为

(14)
式中Ds-g——渐开式感知盲区安全距离,m
a——无人驾驶汽车的制动减速度,m/s2
τdetect——智能汽车感知环节时滞,s
d0——车辆停止后与前方潜在障碍物相对距离,取值2~5 m
(2)跟随式盲区
在跟随式感知盲区中,传感器感知盲区边界线以与自车近乎相同的速度向前运动。此时,若盲区边界线处不存在障碍物,自车将不会发生碰撞。为了避免盲区边界线处突然出现障碍物,不碰撞最小安全距离应为
Ds-f=vτdetect+v2/(2a)+d0
(15)
式中Ds-f——跟随式感知盲区安全距离,m
(3) 引入附着系数
汽车在路面上的制动还受路面和轮胎之间的附着条件的影响,可以得出amax=gφ,φ为轮胎与路面间的附着系数。将其代入式(14)、(15)则有
(16)
Ds-f=vτdetect+v2/(2gφ)+d0
(17)
本文搭建了传感器感知盲区主动避撞安全距离模型,将传感器感知盲区边缘线作为可移动障碍物实施主动避撞措施,使无人驾驶汽车在传感器感知盲区内处于高度警惕状态,提高了无人驾驶汽车的主动安全性能[21]。在无人驾驶过程中,在保证安全性能的前提下兼顾乘客的舒适性,参考路面峰值附着系数辨识算法[22]和典型路面的峰值附着系数和最佳滑移率的关系[23],结合本文设计的传感器感知盲区主动避撞策略,在不同的路面附着系数下,保证乘客的舒适性。
4 主动避撞控制算法验证
基于传感器感知盲区的特征对无人驾驶汽车进行车速的主动控制,控制逻辑如图14所示。
为了验证本文所设计的传感器感知盲区安全距离模型的性能,对比了有、无传感器感知盲区安全距离模型的最小安全距离,并且对存在障碍物情况的传感器感知盲区安全距离模型进行仿真。
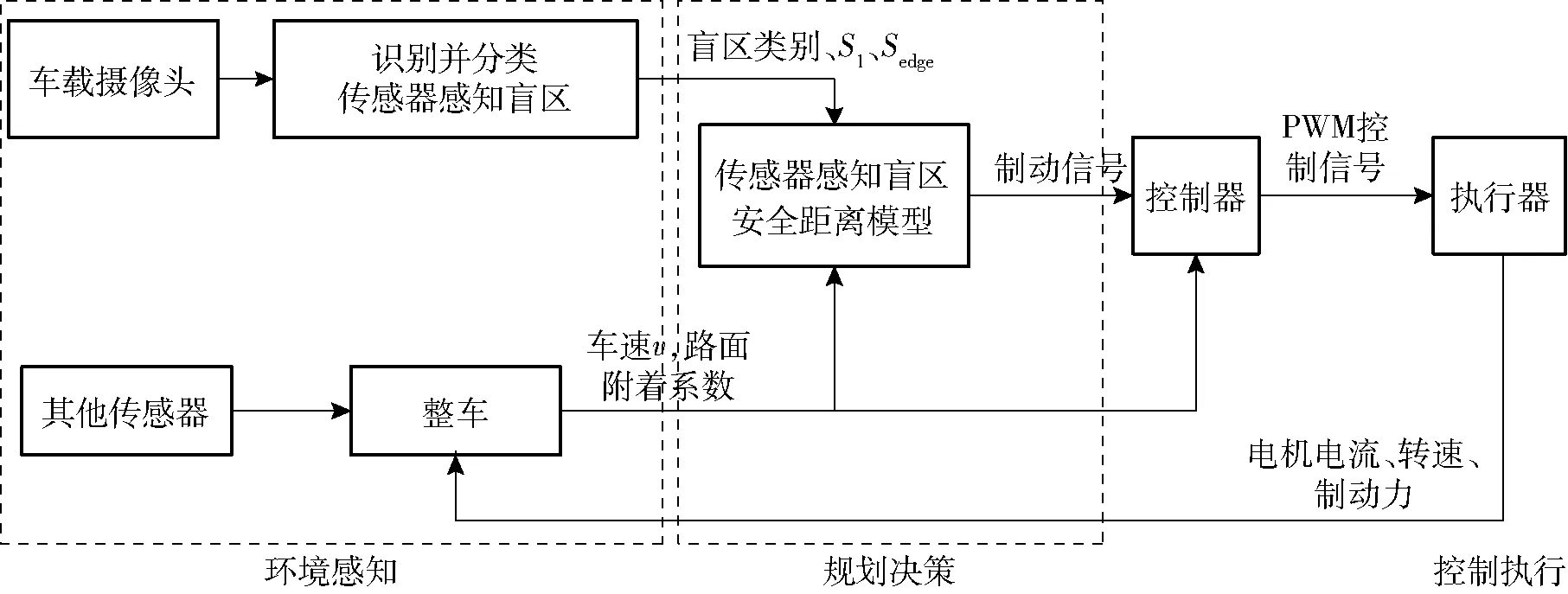
图14 传感器感知盲区主动避撞控制逻辑
4.1 最小安全距离仿真
检测环节时滞为0.2 s,路面附着系数取0.7,分别对渐开式感知盲区和跟随式感知盲区两种潜在交通事故区域进行了仿真分析。通过自车的速度变化分析4种模型的安全距离,仿真结果见图15。
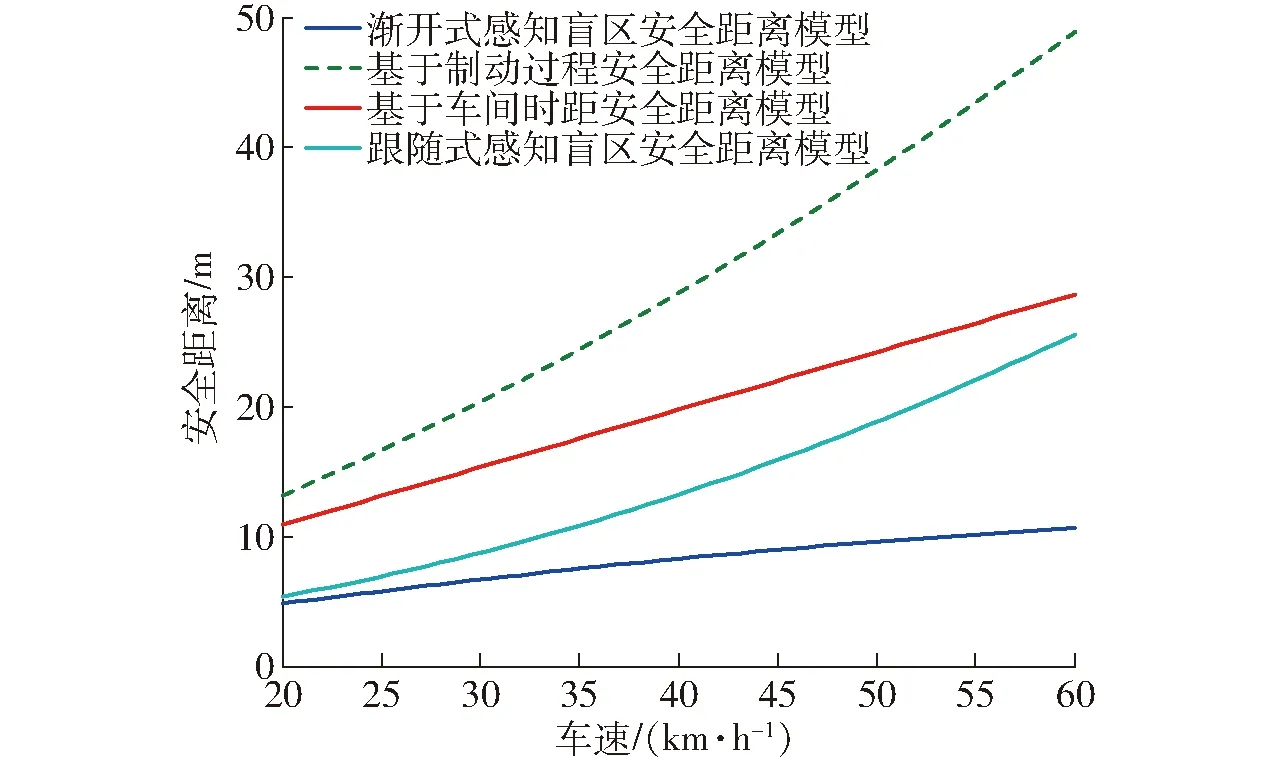
图15 安全距离和车速的关系
仿真结果表明,在特定道路区域,传感器感知盲区安全距离模型计算的最小安全距离小于2个典型安全距离模型。传感器感知盲区安全距离模型将感知盲区边缘线作为疑似障碍物,缩短了判断是否需要制动的时间,提前对智能汽车进行车速控制,提高了智能汽车的主动安全性能。
同时,在弯道、交岔路口等潜在交通事故易发生区域,需既安全又快速地通过。本文提出的传感器感知盲区安全距离模型保证了智能汽车在具有较高安全性能的前提下能够快速地通过潜在交通事故易发生区域。
4.2 渐开式感知盲区仿真
仿真条件:前方为交岔路口,且道路环境中有树木、建筑物的遮挡,影响智能汽车的环境感知。路面附着系数取0.7,传感器感知环节时滞为0.2 s。汽车以80 km/h的车速正常行驶,经减速至36 km/h后驶入交岔路口,与此同时模拟8 s时盲区边缘线处出现静止的障碍物,汽车将立刻制动,直至将速度降为0。仿真中智能汽车速度及行驶位移如图16所示。
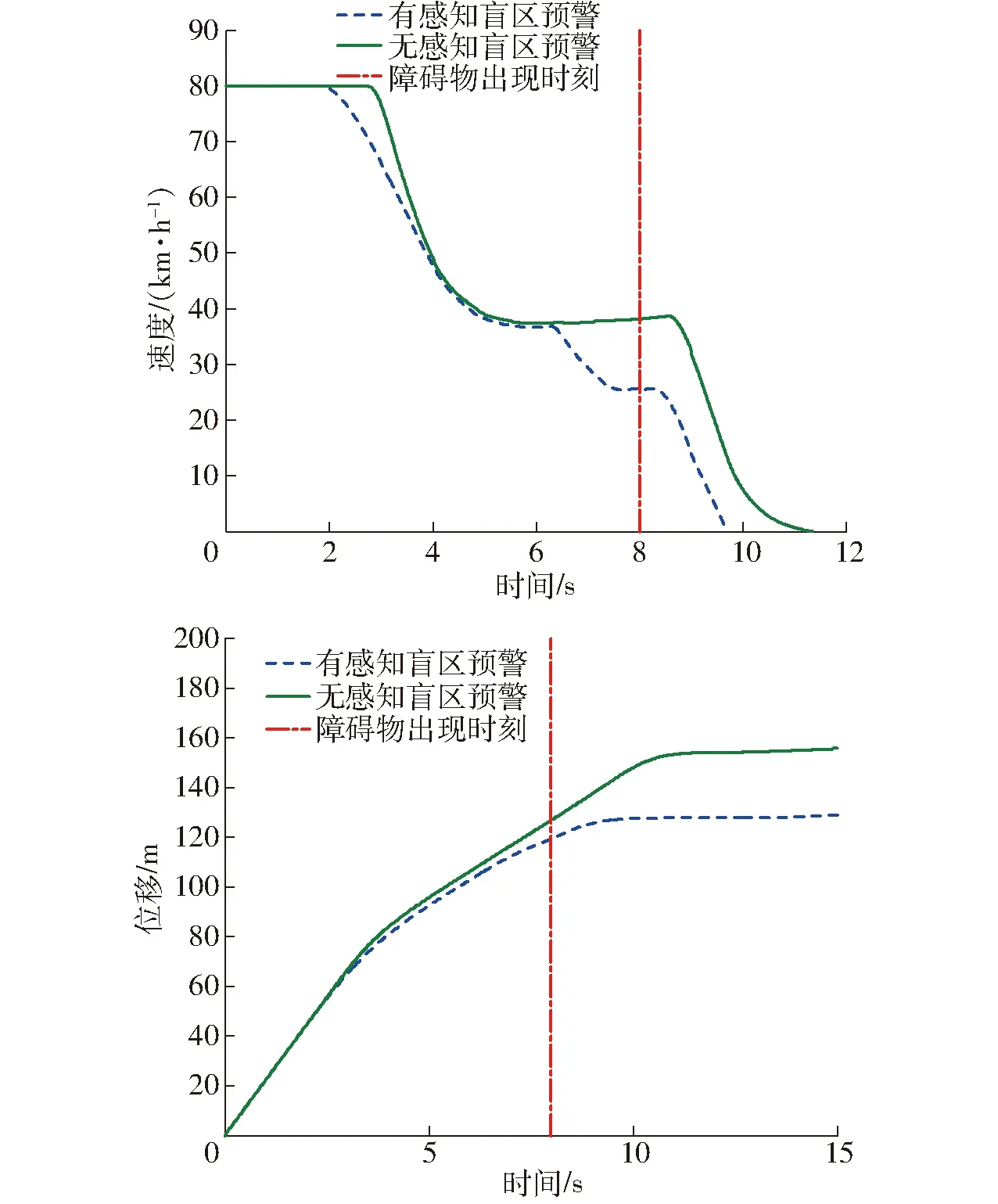
图16 渐开式感知盲区仿真速度、位移对比
由图16可知:
(1)应用传感器感知盲区安全距离模型,经过主动制动仅需1 s左右就已经完成驻车,且从感知到障碍物至自车静止只经过了5.4 m,小于车辆与障碍物的相对距离,将不会追尾碰撞到前方静止障碍物。
(2)应用基于制动过程的安全距离模型,经过主动制动需要3 s左右才能完全驻车,并且从出现障碍物至自车静止经过了24.6 m,大于车辆与障碍物的相对距离,将会追尾碰撞到前方静止障碍物。
4.3 跟随式感知盲区仿真
仿真条件:智能汽车在弯道路径行驶,道路环境中存在树木、建筑物的遮挡,影响智能汽车的环境感知。路面附着系数取0.7,传感器感知环节时滞为0.2 s。汽车以80 km/h的车速正常行驶,经减速至30 km/h后驶入右弯道,盲区边界线距离智能汽车10 m左右,与此同时模拟盲区边缘线处出现静止障碍物,汽车将立刻制动,直至将速度降为0。仿真中智能汽车速度及行驶位移如图17所示。
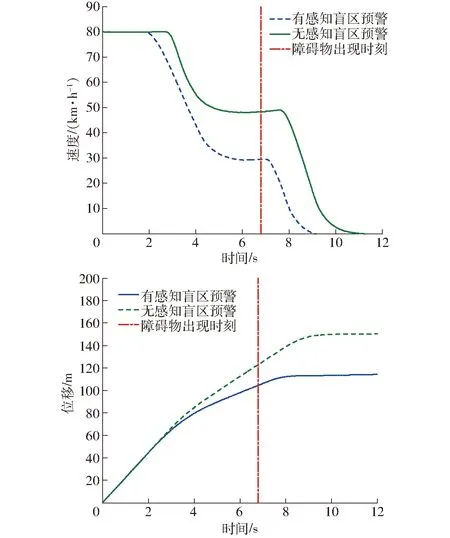
图17 跟随式感知盲区仿真速度、位移对比
4.4 仿真数据分析
由图17可知, 应用传感器感知盲区安全距离模型,经过主动制动仅需2 s左右就已经完成驻车,且从出现障碍物至自车静止只经过了7.6 m,小于10 m,将不会追尾碰撞到前方静止障碍物。应用基于制动过程的安全距离模型,经过主动制动需要4 s左右才能完全驻车,并且从出现障碍物至自车静止经过了30.8 m,大于10 m,将会追尾碰撞到前方静止障碍物。
4.5 实车试验
采用一辆苏州金龙的海格汽车进行实车试验,该车具备高级辅助驾驶系统,将本文的算法编译进其核心控制器中进行实车试验。在车辆未能达到无人驾驶高等级且待测控制器性能未知的前提下,仍由驾驶员对车辆进行操纵。在无已知危险的情况下,驾驶员不会对制动执行机构进行操作。实车试验主要分为两个方向:①以正常车速在无交通信号灯且视野不开阔的十字路口右转。②以正常车速驶入路边存在高大灌木的弯道。在交岔路口和弯道存在静态障碍物和不存在静态障碍物两种工况下进行实车试验,以低于正常行驶车速通过交岔路口和弯道,渐开式感知盲区实车试验数据如图18所示,跟随式感知盲区实车试验数据如图19所示。
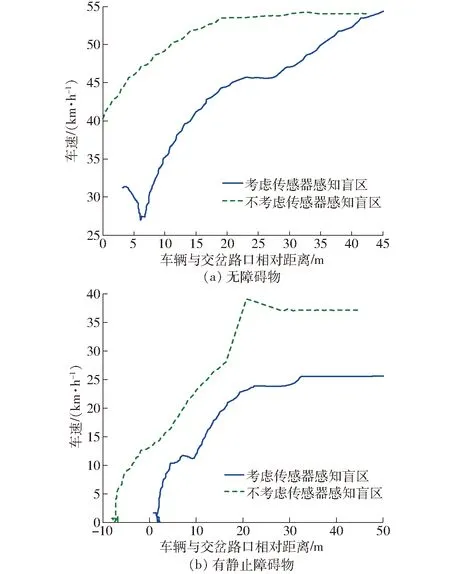
图18 渐开式感知盲区实车试验数据
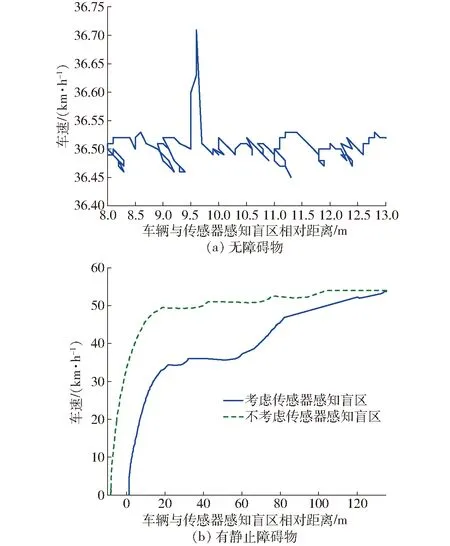
图19 跟随式感知盲区实车试验数据
由图18a可知,在考虑渐开式感知盲区的条件下,随着车辆越来越接近交岔路口,车速逐渐降低,降低到安全车速后若未感知到障碍物则适当加速通过渐开式感知盲区;在不考虑传感器感知盲区的条件下,车辆会以较高车速通过渐开式感知盲区。由图18b可知,在考虑渐开式感知盲区的条件下,车辆速度较低,且会提前调整到安全车速,在感知到障碍物后缓慢制动至完全静止,没有与静态障碍物发生碰撞;在不考虑渐开式感知盲区的条件下,车辆依旧以高速驶向交岔路口,制动完成时已经与静态障碍物发生碰撞,危险程度高。
由图19a可知,由于曲线不是随时间的变化曲线,故同一距离处会显示不同车速,车辆速度多变但相对保持稳定。由图19b可知,车速会随着车辆的制动平缓下降。
渐开式感知盲区和跟随式感知盲区的实车试验验证了本文主动避撞算法的正确性和有效性,提高了无人驾驶汽车的主动安全性能。
5 结论
(1)提出了潜在交通事故的概念,将传感器信息中道路特征消失边缘作为可视移动障碍物的存在,建立感知盲区数据库,搭建卷积神经网络对感知盲区进行识别,根据其运动变化趋势的不同,分为特征不同的3类,囊括了无人驾驶汽车行驶过程中可能出现的大部分传感器感知盲区。
(2)基于传感器感知盲区特征建立了传感器感知盲区安全距离模型,在弯道、交岔路口等道路环境下,感知盲区条件下的安全距离模型效果明显优于现有安全距离模型。
(3)较好的车速控制算法保证了行驶安全性,合适的安全距离能在保证智能汽车安全的基础上使其快速通过弯道、交岔路口等潜在交通事故易发生区域,本文所提出的主动制动系统控制算法能够有效提高智能汽车的主动安全性和道路通过率。
