光纤形状传感技术综述
2020-03-07赵士元崔继文陈勐勐
赵士元,崔继文*,陈勐勐
(1.哈尔滨工业大学 超精密光电仪器工程研究所,黑龙江 哈尔滨 150000;2.南京晓庄学院 电子工程学院,江苏 南京 211171)
1 引 言
光纤形状传感技术是近年来发展起来的新兴技术,光纤形状传感器通常由若干路在空间上具有特定排布的光纤紧密排列组合在一起,光纤形状传感利用各个光纤上在变形下差异化的应变响应来测量光纤形状传感器自身或与之相连的被测物体的位置和形状。近年来,这种技术在医疗微创介入手术导管位置追迹、航天领域关键结构体形态测量、长距离管道及缆线变形监测等场合取得了一系列进展并表现出较大的应用潜力。
光纤形状传感领域的核心问题是如何提高测量精度、测量长度以及测量速度。围绕上述几个问题,人们开展了三方面技术的研究。一是形状传感器的设计与构型,这是光纤形状传感与被测对象之间的桥梁,也是保证测量精度的关键,首先需要结合测量场合和测量对象,其次还应考虑如何实现光纤之间精确的几何排布。二是分布式应变测量方法,现有的空间位置一般是基于不同空间位置的若干根光纤在发生变形时的应变差异来求解的。因此快速地获取在空间上足够密集、准确的光纤应变分布是实现光纤形状传感的基础。第三是空间重构算法,它是联系应变与空间位置的纽带。
本文综述了国内外光纤形状传感技术在不同领域的最新研究进展,详细地介绍了光纤形状传感的关键技术,同时概括了现有光纤形状传感技术所面临的主要问题。
2 背景及应用
在实际应用中,不同的应用领域对光纤形状传感技术有着不同的要求。在短距离、高精度的场合(通常小于10 m),目前报道的光纤形状传感主要集中于医疗微创介入手术的导管位置追迹,其末端位置误差要求在毫米以下;而对于公里级别距离的形状测量,其潜在应用场合为管道或海底光缆变形监测。相对于前者,其精度要求不高,目的在于反映出被测对象的空间移动量或位置变化。
2.1 医疗领域
微创介入手术导航是微创介入手术中的关键技术。以外科手术中常见的心脏经导管微创介入手术如经导管主动脉瓣植入以及射频消融等[1-2]为例,医生将导管插入心脏来实施诊断和治疗,微创介入手术导航系统通过对导管的追迹和定位确定导管和周围心脏组织的相对位置信息,帮助外科医生精确地将导管插入到手术目标位置[3]。在机器人辅助血管内手术中,介入设备的空间位置可用于实时评估系统及自动控制系统等[4-5],同时监测微创介入导管的形状可以确保导管接触的稳定性以防止导管损伤血管壁[6]。医疗领域中对微创介入设备的形状测量要求具备毫米量级的分辨力,测量对象的弯曲半径通常小于5 mm且测量长度小于1 m[7]。目前,计算机断层扫描、超声成像以及核磁共振这3种图像引导微创介入方式被广泛应用于微创介入设备导航及定位,它们可以对整个微创介入器械及周围区域成像以获得全局信息[8]。然而,超声成像分辨力有限,断层扫描成像带来的辐射对病人或者医生的伤害大,而核磁成像虽然有很多优势但是显像速率低并且和电磁材料不兼容。同时,计算机断层扫描成像和核磁共振重构图像的速度非常慢,计算机断层扫描成像重构时间在几十秒[9],这些缺点导致单一的图像引导方式不能满足临床需求[10-13]。 近年来,根据不同的场景和临床需求出现了不同追迹方法的融合。其中,由于核磁共振成像分辨力高以及光纤传感器体积小、生物兼容性好和实时测量的特点,核磁共振和光纤形状传感技术的结合在微创介入器械的追迹上显示出非常大的应用潜力。将光纤传感集成到现有的医疗微创介入设备中,在图像引导环境尤其是核磁共振环境下,通过多传感融合对微创介入器械的空间形状和位置进行测量的方法,受到越来越多的关注[10-13]。
2010年,美国LUNA公司申请了利用螺旋多芯光纤作为形状传感器,并采用光频域反射系统进行光相位追迹来实现导管空间位置追迹的专利[14],后来LUNA公司将该专利转让给美国直觉外科公司(Intuitive Surgical),后者将该技术应用于微创介入导航系统Ion中[15]。图1显示了Ion系统中集成了光纤形状传感器的介入导管进入肺部神经末梢的过程。Ion系统可集成到现有的肺结节活检工作流程以及现有的成像技术,包括透视,桡神经支气管内超声和锥形束CT[15]。Ion系统的光纤形状传感技术可在整个导航和活检过程中对导管位置进行主动控制,一旦达到目标结节,导管就会锁定到位,以提供精确放置活检工具所需的稳定性[15]。导管的外径为3.5 mm,医生可以通过小而曲折的气道导航到达肺内任何气道段的结节[15]。
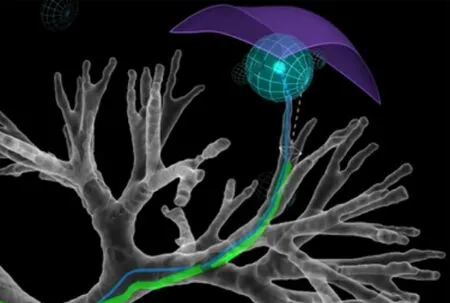
图1 集成了光纤形状传感器的Ion系统活检针对肺部组织的取样过程[15]
2.2 形态测量
航空航天关键结构的形态测量是航空航天领域一个极为重要的技术需求。为了提高飞行器的综合性能,各种航空航天飞行器广泛采用大尺度、高强度、轻质的薄壁柔性材料。一般来讲,柔性结构具有低刚度、小阻尼、共振频率低的特点,受到扰动激励后极易发生持续的结构形态变化和大幅低频振动。如太阳能无人机作为新一代高空超长航时无人机,其展弦比一般大于30,在高强度的飞行要求和复杂的外界干扰下,翼尖的最大弯曲变形可达半翼展的25%[16]。在结构形态长时间大幅变形的情况下,不仅会威胁机翼本身的稳定,而且很可能与飞行器主体发生耦合作用,从而影响飞行器的姿态稳定和定向精度。对机翼的形变状态测量对预测翼梁的结构损伤和保障飞机的运营安全具有重要意义。除了机翼变形监测,航天上柔性器件也需要进行形状监测。目前,光纤传感方式比电学传感方式展现出越来越大的优势。
2012年,美国LUNA公司将多芯光纤形状传感器(总长30 m)布设在柔性结构表面(结构长10 m左右),通过重构多芯光纤空间位置获得被测表面的空间变形[17],如图2所示,光纤布设分别为U型和回旋型。重构误差在1.5%以下。这一技术为大型柔性结构的变形监测提供了很好的手段。相较于传统的电学应变片或者布设单模光纤的方式监测应变场进而推测结构变形信息的方法,采用多芯光纤形状传感器可以显著降低布设的复杂程度,同时柔性结构体的扭曲信息可以反映到形状传感器的恢复结果上。此外,值得注意的是,2015年美国NASA 阿姆斯特朗飞行研究中心在一份报告中详细列举了光纤传感技术在航空航天结构状态监测的研究进展[18],其中基于光纤形状传感器的三维形状传感被应用在火箭运载系统的变形测量上。
2.3 工业领域及现有产品
2.3.1 连续体机器人机械臂空间姿态监测
图3显示了机器人的发展趋势[19],由关节连接的离散刚性连杆组成的传统操纵器向着具有连续切向量的曲线的连续机器人发展。连续体机器人需要连续、实时和小尺寸的形状感应,以实现先进的控制策略。光纤形状传感器可以嵌入灵活的机器人链接和连续体机器人的机械臂上,实现运动状态及空间位置的实时监测[20-22]。光纤形状传感相对于电学传感方式,可实现更高效、轻量和低成本的工业机器人。
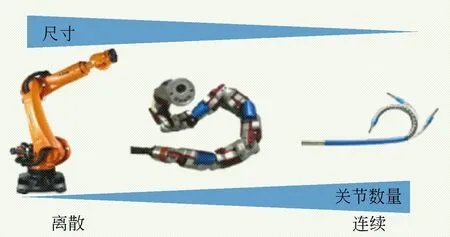
图3 从离散机器人到连续机器人的机器人技术演化[19]
2.3.2 智能可穿戴设备的位姿监测
美国直觉外科公司[23]和韩国科学技术研究院[24]将光纤形状传感技术用于智能可穿戴设备的位姿监测。图4为使用FBG传感器的手指运动捕捉系统[24]。
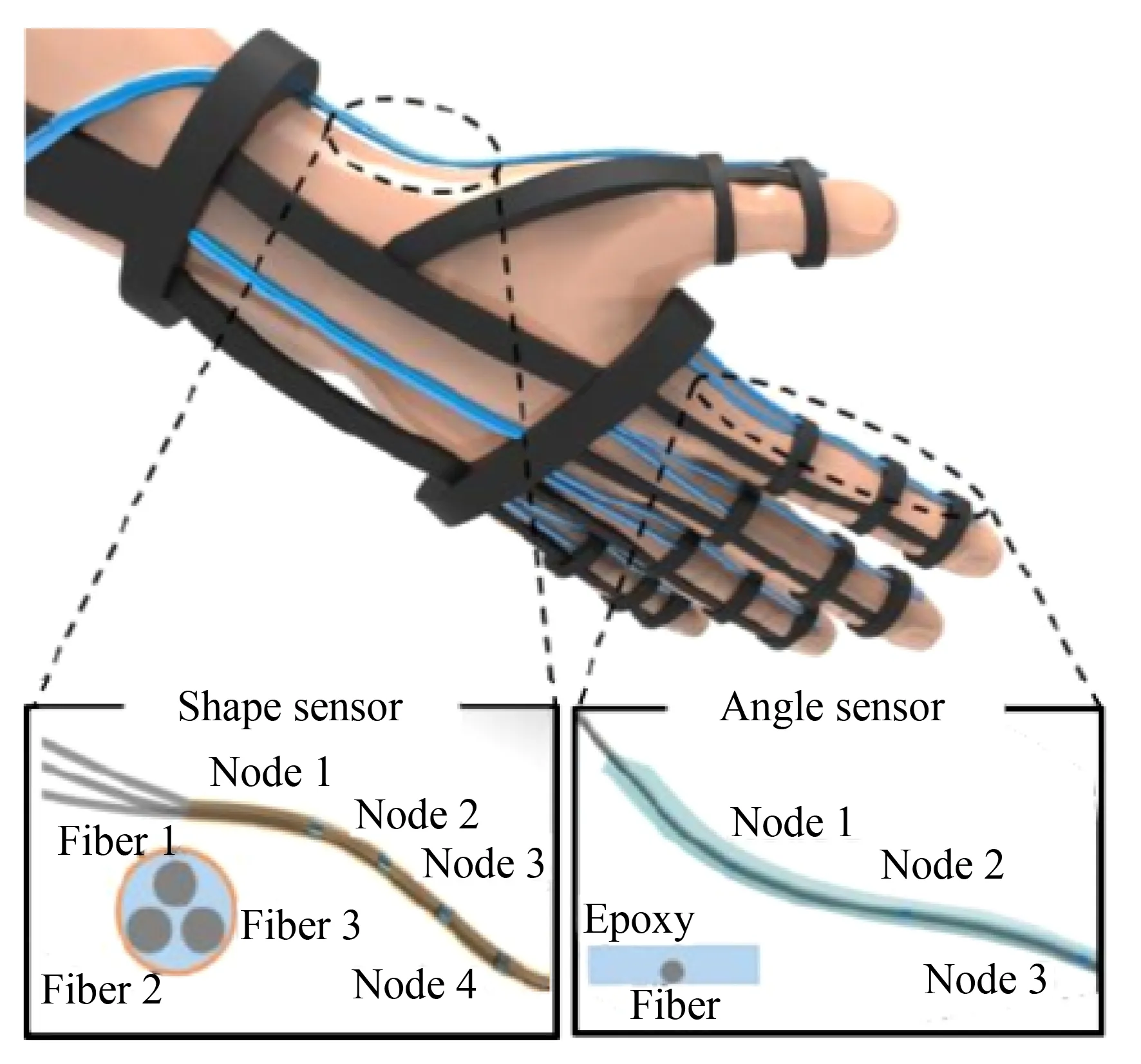
图4 使用光纤光栅形状传感器的手指运动捕捉系统示意图[24]
2.3.3 现有的商用光纤形状传感器产品
2015年,美国Sensuron公司(4DSP的子公司)与NASA共同开发的RTS125+型分布式光纤传感系统可以实现最多8通道分布式光纤应变信息解调,测量速度达100 Hz[25],其解调系统为采用光频域反射访问光纤中的无间隔光栅阵列。该公司将该系统应用于三维形状测量上,并面向医疗微创介入手术的导管位置追迹上[25]。图5为Sensuron公司的形状传感器演示。
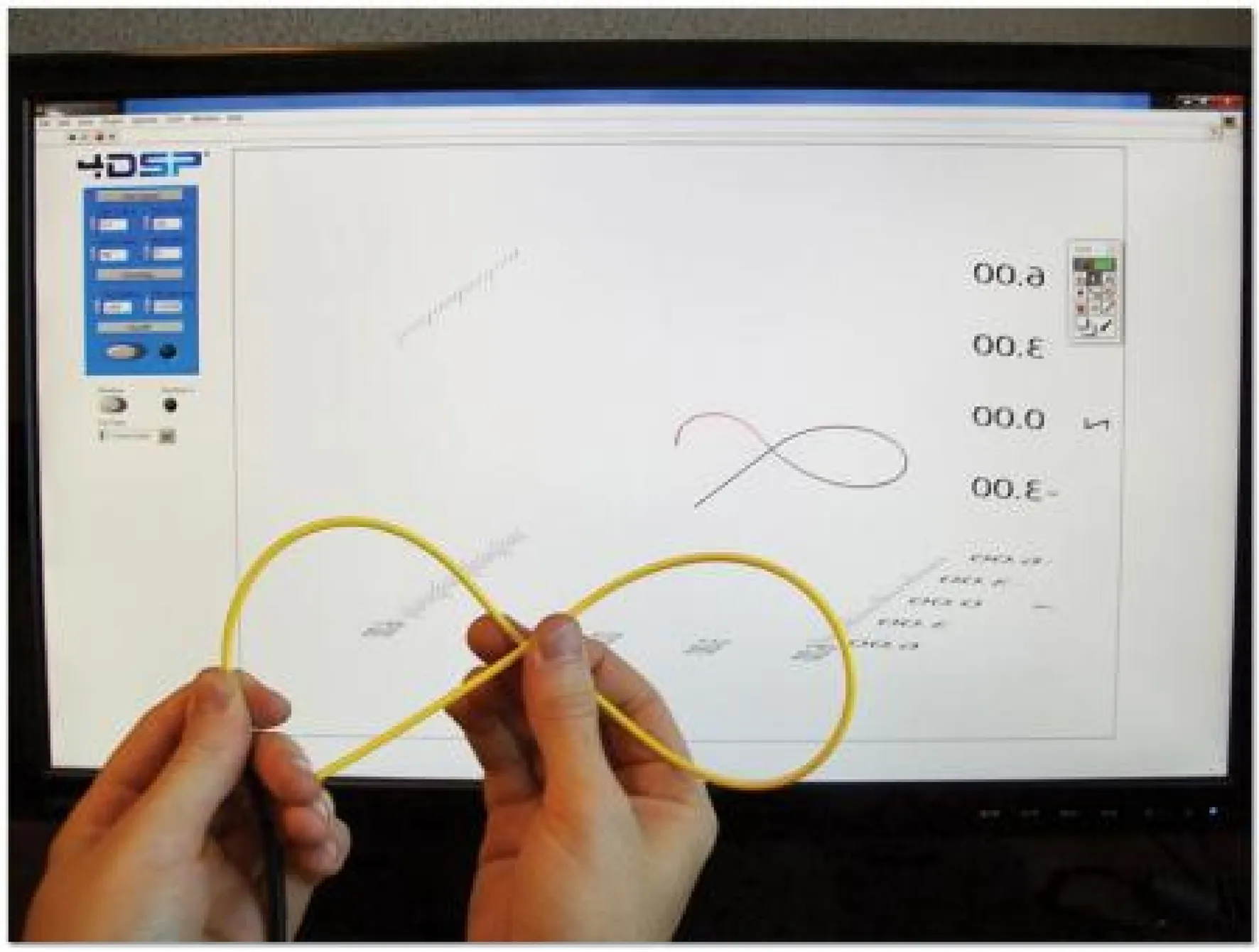
图5 Sensuron公司的形状测量演示[25]
美国LUNA公司在2013年就已推出了光纤形状传感器[26],但是该产品未向中国市场开放。根据其产品手册给出的结果,在2.5 m长度下测量精度小于所测长度的1%,最小弯曲半径为10 mm,解调速度为10 Hz;在30 m长度下测量精度小于所测长度的1%,最小弯曲半径为50 mm,解调速度为0.2 Hz。根据LUNA给出的典型应用场景,一方面为医疗领域(但是该部分业务在2014年被出售给美国直觉外科公司,因此LUNA不再发展该业务),另一方面为坐标测量,如图6所示[27]。然而,由于LUNA的形状传感技术是基于光频域反射技术的,也就决定了其最长的传感长度最多为几十米,无法应用于更长距离的测量场合。
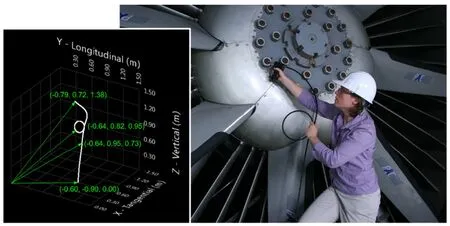
图6 LUNA公司形状传感器用于坐标测量[27]
2.4 潜在应用
以桥梁结构为例,挠度作为最直观反映桥梁结构受力情况、评估桥梁健康状况、分析桥梁潜在问题的重要参数之一,桥梁挠度监测显得尤为重要[29]。光纤形状传感器可以对这一参数进行有效监测,进而监测桥梁的健康状况。
此外光纤形状传感技术还可用于电缆的变形监测与寿命评估。将来自多个光纤光栅传感器的应变测量值沿着电缆圆柱形杆组合布设可以实现形状感测,通过两个平行的传感器阵列可以确定弯曲方向和弯曲半径。使用形状传感功能,可以识别安装过程中的过度冲击或弯曲,并在投入使用前更换导体[29]。
图7为水听器拖曳阵形状示意图[30]。水听器拖曳阵列形状估计是大多数阵列处理算法的关键步骤,因为水听器元件位置的不确定性严重降低了算法性能。阵列信号处理是确定空间分布目标的方位和距离信息的经典算法。大多数阵列处理算法,例如MUSIC、子空间拟合方法和最大似然,都需要已知阵列形状的参数。然而,通过船舶操纵,洋流和其他扰动可以容易地改变阵列形状。当阵列形状的参数变化未知时,性能会严重下降。因此,阵列形状估计是提高阵列处理算法性能的关键步骤[31-32]。
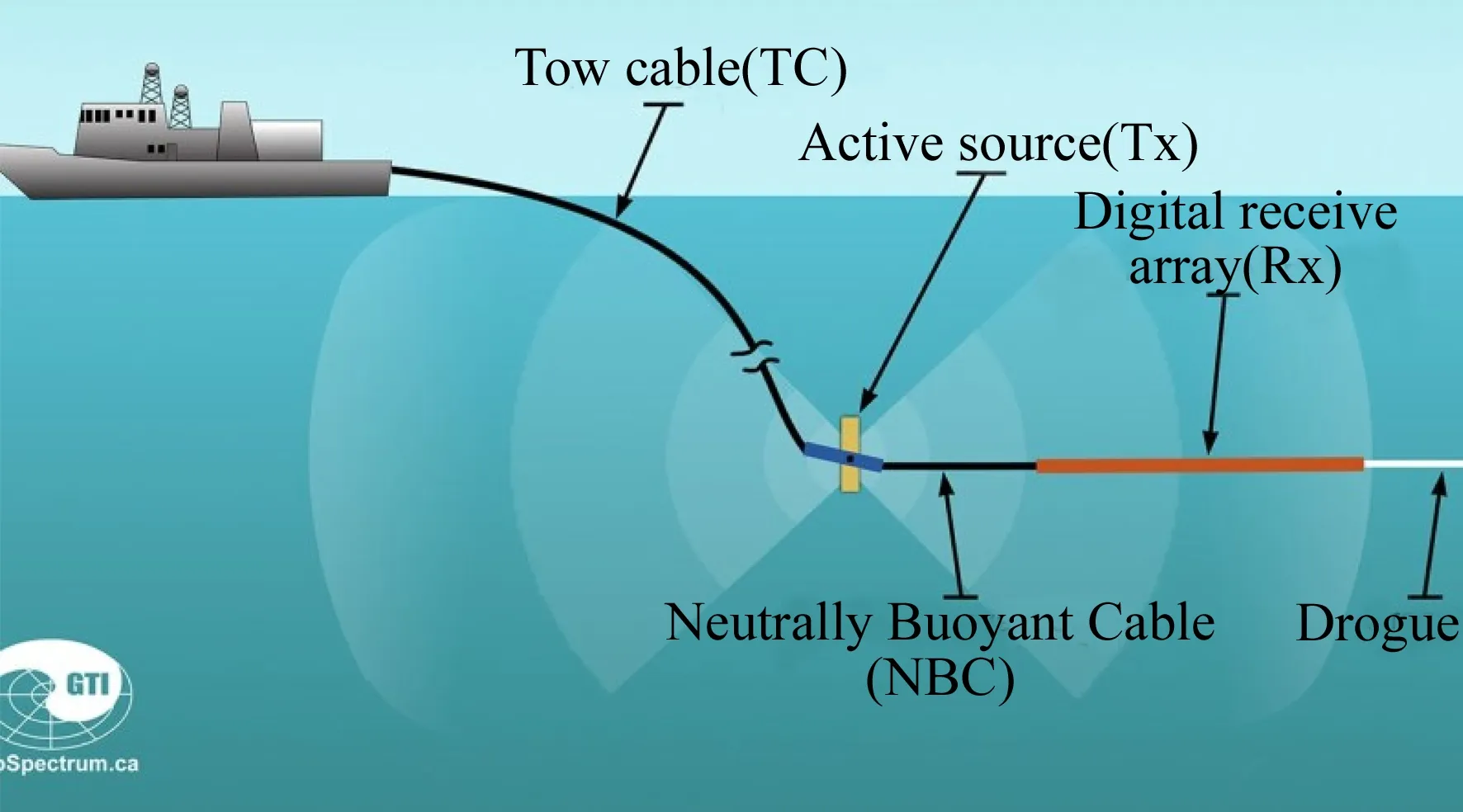
图7 水听器拖曳阵形状[30]
尽管光纤形状传感器在上述领域还没有较为成熟的应用,但是其前景非常广阔。
3 光纤形状传感关键技术
光纤形状传感的3个核心技术分别为传感器设计与构型、分布式应变测量方法以及空间重构算法。
3.1 传感器设计与构型
光纤形状传感技术在构型上要求利用若干根具有特定排布的光纤紧密组合在一起,需要多路光纤与中性面存在相对位置关系。这种设计的目的是使光纤形状传感器在发生变形时各个光纤产生差异化的应变响应。光纤形状传感可分为自封装式和多芯光纤式。
3.1.1 自封装式
自封装式是通过自己加工制作符合特定空间构型的形状传感器。通过特制的封装装置和方法将多根光纤均匀排布粘贴在基材(导管或活检针)周围或者将裸光纤粘贴在一起构成“光纤簇”,常见的排布方式包括4根正交以及3根呈120°。近年来,光纤光栅阵列已应用于活检针一类微创介入医疗器械的挠曲变形检测。这类手术针的特点是长度短,一般只有200~300 mm,而且刚度较大,多为面内弯曲,形式简单。活检针只需要末端点位置检测而不需要整个形状的重构,通常采用弹性杆理论和理论力学即可完成形状解算。传感器在形式上多为多路包含光纤光栅阵列的光纤粘贴在活检针外侧母线上。
2014年,荷兰特温特大学的Roesthuis等人采用光纤光栅阵列来实现微创手术活检针的位置检测和手术操作的闭环控制[33]。其传感器构型如图8所示,172 mm的活检针上集成了12个光纤光栅阵列,分别对二维平面内单弯曲,二维平面内多弯曲以及三维形状进行了重构,误差分别达到了0.2,0.51,1.66 mm。相较于图像引导微创介入方式,采用波分复用访问各路光纤光栅传感点可以达到20 kHz的采样速率,适合于实时应用。但是,光纤光栅需要设计专门的封装装置,而受限于机械装置的精度,光纤光栅空间位置的封装精度不能很好保证。同时还要考虑光栅和基材的应变传递效率[34]。另外,光纤光栅只能测量离散位置,测量盲点要通过插值进行估计,使得精度受限。
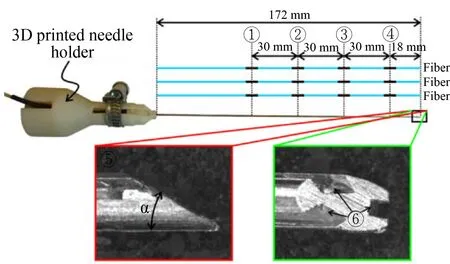
图8 Roesthuis等人设计的基于光纤光栅的活检针变形测试装置[33]
为了采用光栅阵列对刚度更小的导管类微创介入装置进行形状监测,2014年,哈佛大学医学院Seok等报道了不同于其他将光纤粘贴在金属线或者手术针上的构型[35]。如图9所示,他们将光纤光栅粘贴在金属网编织物上,由于金属网编织物具有小的弯曲刚度和大的扭转刚度,光纤不容易产生扭曲,减小了误差。
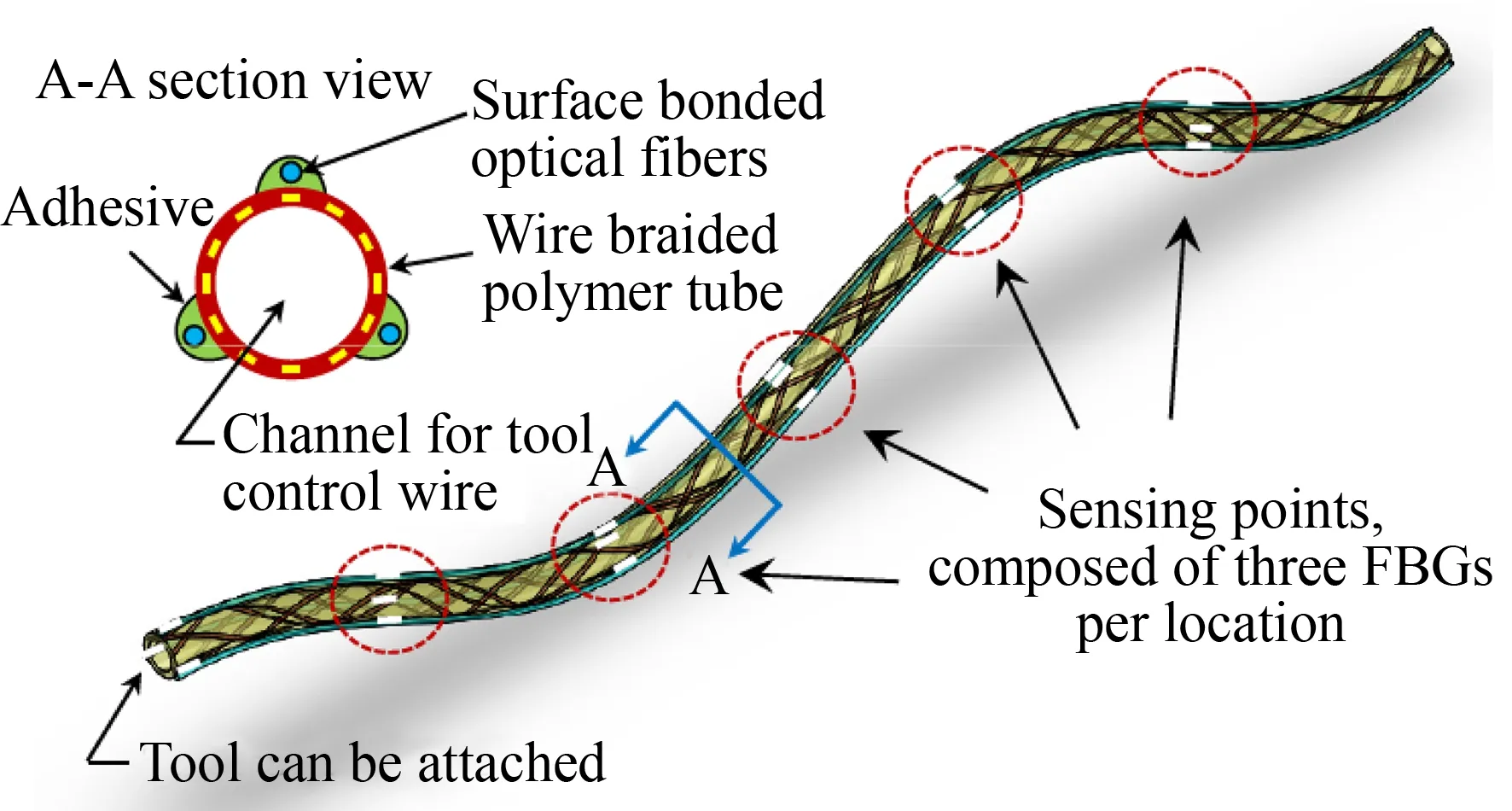
图9 内置光纤的金属编织导管形状监测方法[35]
除了将光纤粘贴在基材上构成形状传感器外,还可以直接将裸纤粘贴在一起构成“光纤簇”。如图10所示,2013年德国KIT研究所设计了专用的机械装置将3根光纤直接粘在一起[36]。2017年,加拿大多伦多大学的学者提出了类似的传感器封装方式[37],如图11所示。这样的传感器制作方式的初衷就是保证多根光纤的相对位置,但是实际过程往往不如人意,误差很大。

图10 将3根光纤粘贴在一起设计形状传感器[36]
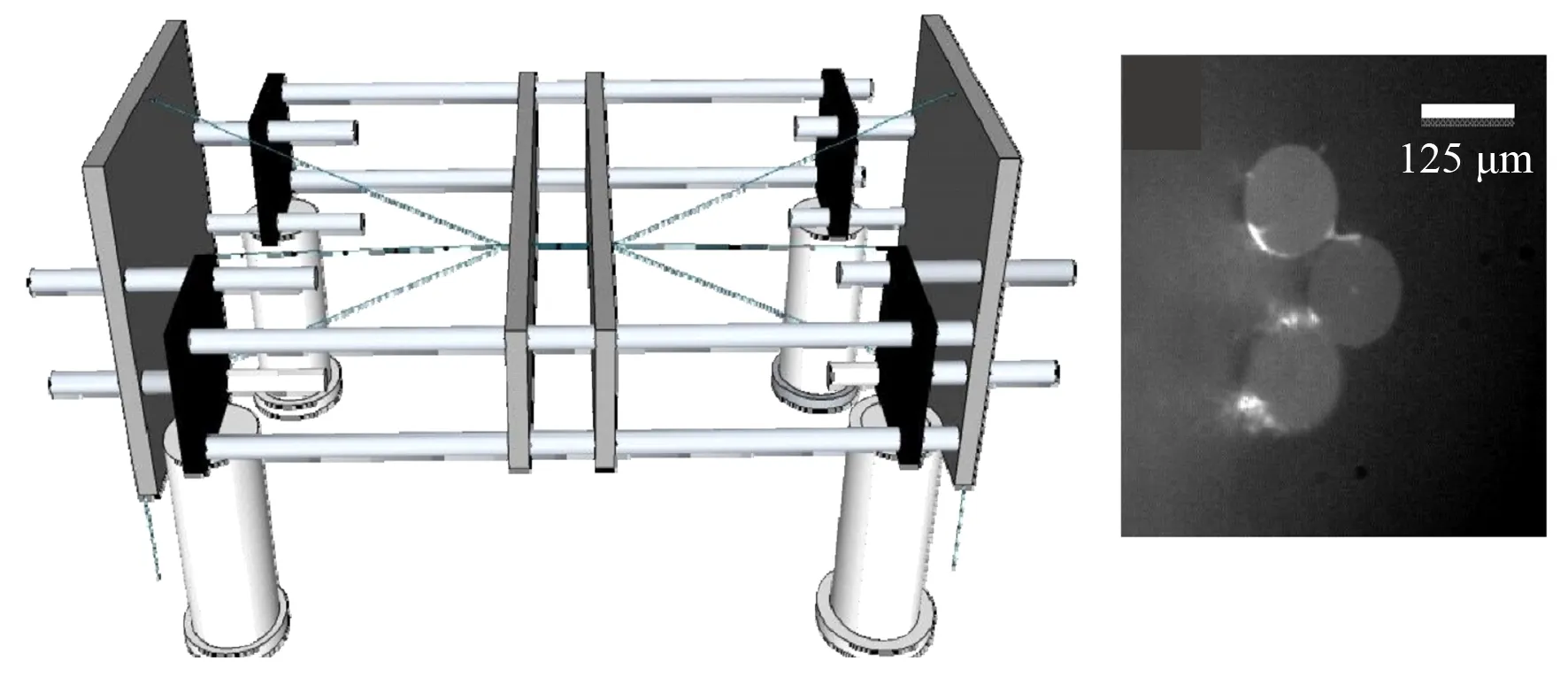
图11 多根光纤粘贴封装机械装置及显微图像[37]
在国内,上海大学研究了基于光纤光栅形变测试技术的智能内窥镜形状重建和可视化的方法[38], 实现了基于曲率的曲线形状重建。具体实现形式是采用光纤光栅作为传感元件,通过标定确定了光栅点的波长漂移量和曲率之间的关系,从而实现了细长柔性基杆(形状记忆合金)形变曲率的实时检测,然后通过离散曲率拟合重建出曲线形状,并实时显示出来。如图12所示,光纤光栅封装后的总长为900 mm,相邻检测点之间间隔10 mm,4根光纤光栅传感阵列的中心波长、反射率等参数完全一致。
将刻有光栅阵列的单模光纤粘在手术针等微创介入设备周围,或者把多个光纤通过特定机械装置直接粘在一起等方式中,光纤的空间位置受机械装置与粘贴情况的影响较大,导致传感器的一致性和精度不能得到保证。应用在活检针上的形状传感器精度会更高一些,原因在于这种场合测量长度较小,变形较小,因此需要的传感点不多,这也是为何一般采用离散光纤光栅阵列的原因,在传感器校准中(校准不同光栅测点波长变化量和弯曲曲率的关系)也只针对有光栅存在的横截面。而对于一些较长测量长度以及用光纤内部散射信号测量应变的形状传感器而言,则需要保证沿光纤所有位置的封装一致性,且需要在间距更小的截面上一一校准,这样就对传感器的封装制作提出了更大的挑战。此外,基材上粘贴光纤只适合于小弯曲情形,原因在于该构型中光纤光栅距离中性面较大,光栅所响应的应变测量信号容易使解调设备超出量程。
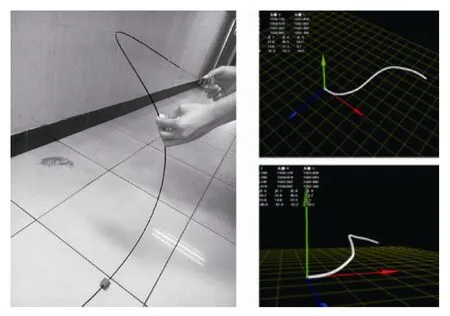
图12 外贴光纤的柔性基材形状重构结果[38]
3.1.2 多芯光纤
采用多芯光纤作为光纤形状传感器是近年来发展的一种技术。多芯光纤具有特定的纤芯排布,一般是中心一个纤芯,与之间隔一定距离的圆周等间距排布若干其他纤芯。多芯光纤因为纤芯距、纤芯角度等结构参数在多芯光纤出厂时即已精确确定,因此,由几何参数带来的重构误差更小,几乎可以忽略。同时,多芯光纤适用于极大的曲率场合(弯曲半径可达5 mm)。多芯光纤构成的形状传感器不仅构型紧凑,而且因为各个纤芯基本各向同性,不需要对光纤和光栅进行逐一标定。
多芯光纤中,各个纤芯的分布式应变可以采用光纤中固有散射作为传感信号或者在多芯光纤上刻写光栅阵列。近年来,随着飞秒激光加工工艺的提高,在多芯光纤上直接刻写光纤光栅阵列成为可能,英国的Fibercore公司采用飞秒激光器对多芯光纤进行光栅刻写,光栅间距可以达到几个毫米。光纤光栅的反射率可以在1%以下且刻写数量可达上千个[39],光频域反射系统或者波分复用等技术可以用于解调多芯光纤各个纤芯上的光栅应变信息。
2012年,美国NASA兰利研究中心Moore报道了利用刻写有光纤光栅阵列的多芯光纤进行自身形状重构的实验[40-41]。尽管多芯光纤自身扭转等因素使得重构结果存在较大误差,但是这一研究成果确定了一种在多芯光纤中通过离散应变信息求解自身空间位置的有效方法。实验结果给出的最大误差为测量长度的7.2%。
3.1.3 螺旋光纤
局部扭曲是光纤形状传感器中一个很重要的误差来源[41-42]。扭曲指的是在光纤形状传感器中远离中性轴的光纤或者纤芯在传感器变形过程中产生的局部周向角度偏移。扭曲可能在操纵期间由操作者旋转仪器而引入,或者当仪器被移动时由光纤与仪器腔之间的摩擦(粘贴-滑动)而引入[43]。在临床使用期间,尤其是在脉管流程中,医师常常将导丝/仪器进行旋转。这样的扭转导致固定端部设备中扭曲的累积,令形状感测失去准确性和稳定性,并且最终导致形状重建的失败。因此,一方面是将由临床医师施加在光纤上的扭曲量最小化,同时确保仪器的取向仍然已知,并且仍然能够以普通方式操作和扭转仪器;另一方面是将这个扭曲信息测出来并在重构算法上予以补偿。为了求解扭曲信息,螺旋型设计被应用在多芯光纤以及基材外贴单模光纤型形状传感器中。
2008年,美国海军实验室的Askins等人将多芯光纤的离轴纤芯设计成螺旋结构[44],以此解算出外部扭曲。螺旋结构是将光纤形状传感器中远离中性轴的各个光纤或者纤芯在传感器制作过程中预先施加一个等量的具有一定周期的扭曲。螺旋外部纤芯在受到弯曲后会产生共模响应,通过螺旋纤芯设计,轴向应变、弯曲致应变以及扭曲致应变可以分离。在螺旋外部纤芯构型中,提高扭曲测量灵敏度的方法包括降低螺距以及增加外芯到中心的距离。美国LUNA公司同样采用了螺旋式的多芯结构[14]。美国OFS公司以及英国FiberCore公司在2015年推出了螺旋结构多芯光纤[43]。同时,OFS公司还实现了利用紫外光及相位掩膜版在螺旋结构多芯光纤上刻写连续光纤光栅以提高传感信号信噪比,并利用光频域反射技术解调各个纤芯分布式应变以实现三维重构[45],图13所示为OFS公司的连续FBG制造装置[46]。近年来,飞秒激光技术也能在多芯螺旋光纤上刻写光栅。2019年,俄罗斯新西伯利亚大学采用近红外飞秒脉冲激光在螺旋多芯螺旋光纤刻写了光栅[47],图14所示为飞秒激光器逐点刻写光栅示意图。通过飞秒激光刻写光栅无需预先去除涂覆层或者使用强度相对较弱的紫外透明涂覆,工艺更加简单。
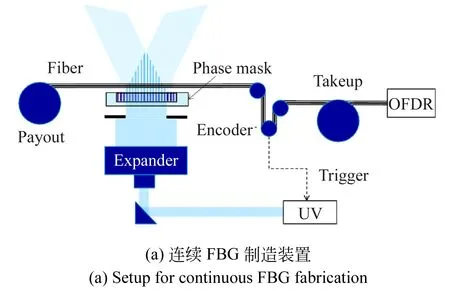
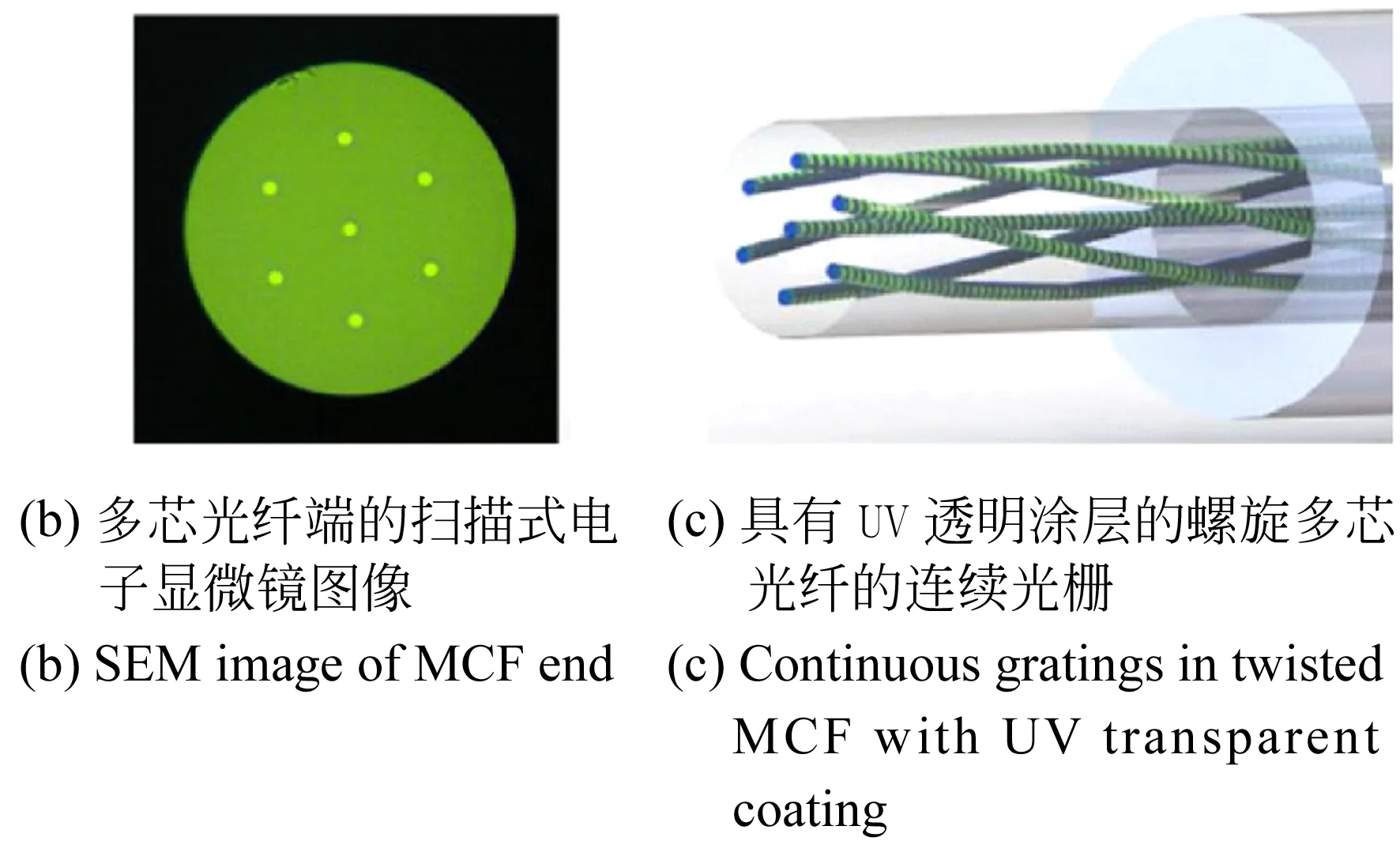
图13 OFS公司连续FBG制造装置[46]
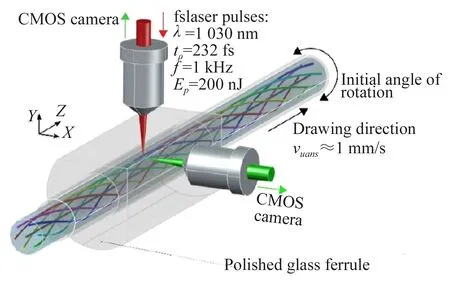
图14 飞秒激光刻写光栅的聚焦[47]
2016年,Xu等将三根单模光纤按螺旋结构粘贴在镍铬合金丝上[48],图15仅给出了二维定曲率形状的测试,同时扭转和曲率并未解耦实现同时测量。另外每个螺旋周期内只有一个光纤光栅测点,在测量精度要求高且形状复杂的情况下难以满足测量要求。
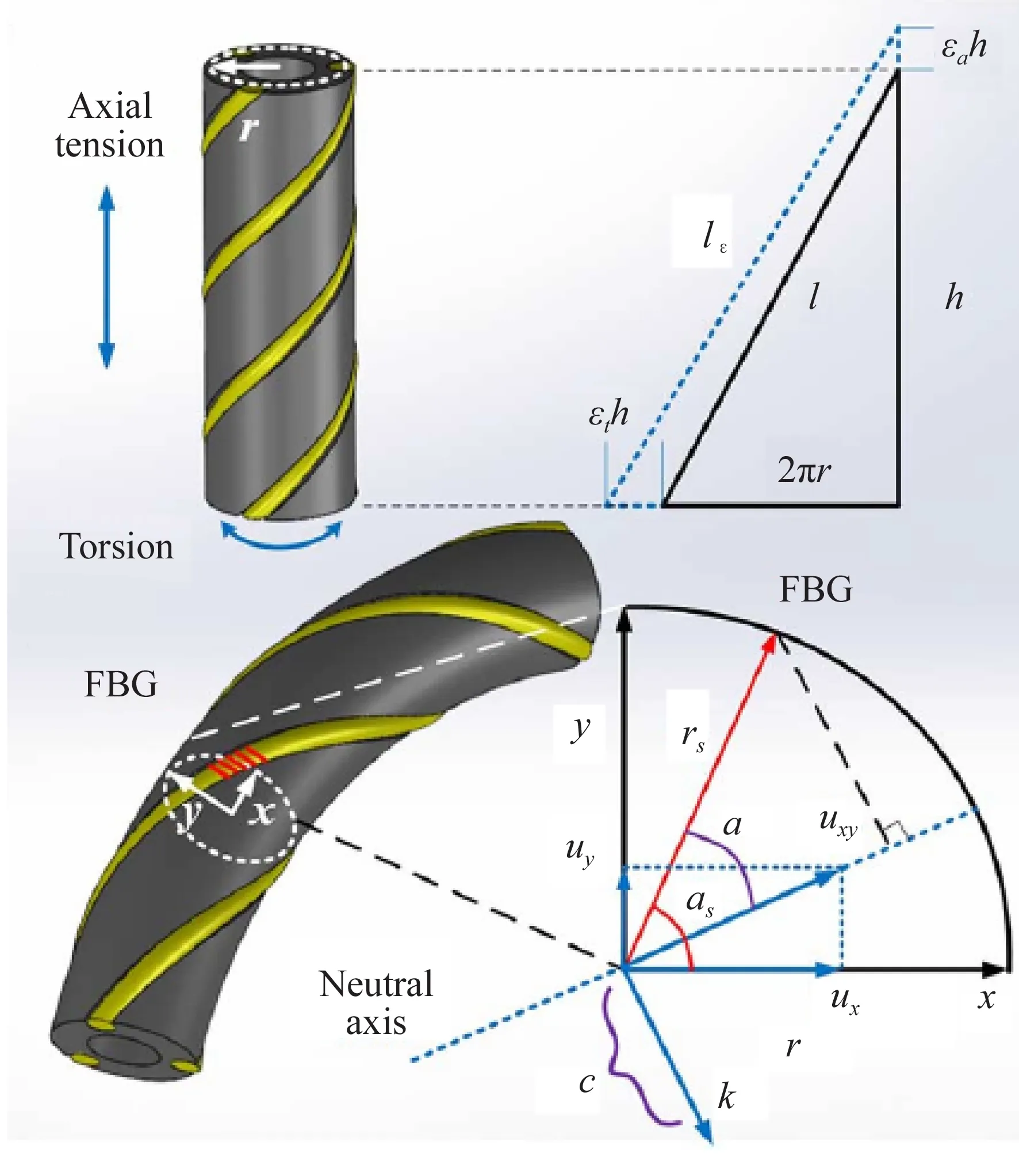
图15 将光纤螺旋缠绕在柔体杆上进行曲率测试[48]
(1)
其中Kφ为单位长度光纤发生的扭曲(rad/m)。
另外存在:
εt·h=r·dΦ,
(2)
其中r·dΦ为伸长的圆周的小弧长。
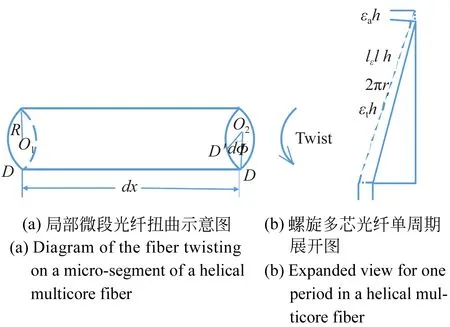
图16 局部微段光纤扭曲示意图和螺旋多芯光纤单周期展开图
将单周期螺旋部分展开为如图16 (b)所示,当光纤受到扭曲和轴向拉力后,微段上离轴螺旋纤芯长度由l伸长到lε,因此其合应变大小为:
εl=(lε/l)-1,
(3)
近似有如下线性关系:
εl=w1εa+w2εt,
w1=h2/l2,
w2=2πrh/l2,
(4)
其中w1和w2分别是轴向应变以及剪应变的灵敏度。
当光纤发生弯曲时,其截面图如图17所示,光纤中性轴沿X轴。各个纤芯受到的应变由4部分组成,分别是纯弯曲致应变,扭曲致应变,轴向拉伸致应变。对图17所示的3个外芯和1个位于中性轴上的纤芯而言,在某一个截面(对于空间上的某一个位置)上各个纤芯的应变可以表示为:
(5)
其中:Rb为弯曲半径,
(6)
经过扭曲补偿的弯曲方向角可表示为:
(7)
其导数为空间曲线的挠率,而1/Rb为空间曲线的曲率。在得到曲率以及挠率后,可通过弗莱那框架微分方程求解曲线形状。
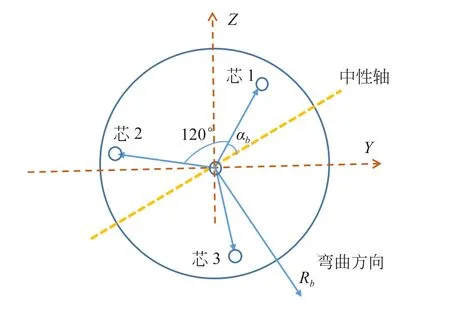
图17 多芯光纤截面示意图
根据各个纤芯应变求解方程,对于具有周期螺旋的光纤,若不发生局部扭曲,光纤仅仅受纯弯曲的作用,外芯的应变应该以螺旋周期为变化周期,同时曲率越大,正弦幅值越大。而轴向应变以及外界温度带来的变化为共模噪声,可以通过中间纤芯的应变响应值按系数进行补偿。
3.1.4 光纤构型
分布式曲率传感器(二维形状传感)如图18所示[7],其基本原理是通过布设在远离中性面且距离中性面长度已知的光纤来感知弯曲致应变,弯曲曲率可根据ρ=ε/h计算得到,其中ε为应变值,h为应变测量点距离中性面的距离。图18中,橙色线为中性面所在位置,在其上的光纤不发生拉伸或者压缩,而离轴的布设在远离中性面的传感光纤,光纤在弯曲情况下分别发生了拉伸和压缩应变。根据曲率计算公式,形状传感器可以测量的最大曲率取决于传感器的几何构型以及应变测量系统的应变量程,同时还需注意曲率过大光纤的弯曲损耗也会相应增大。光纤形状传感器可以测量的最小曲率和传感器的几何构型以及应变测量系统的应变分辨力(解调系统的波长分辨力)直接相关。
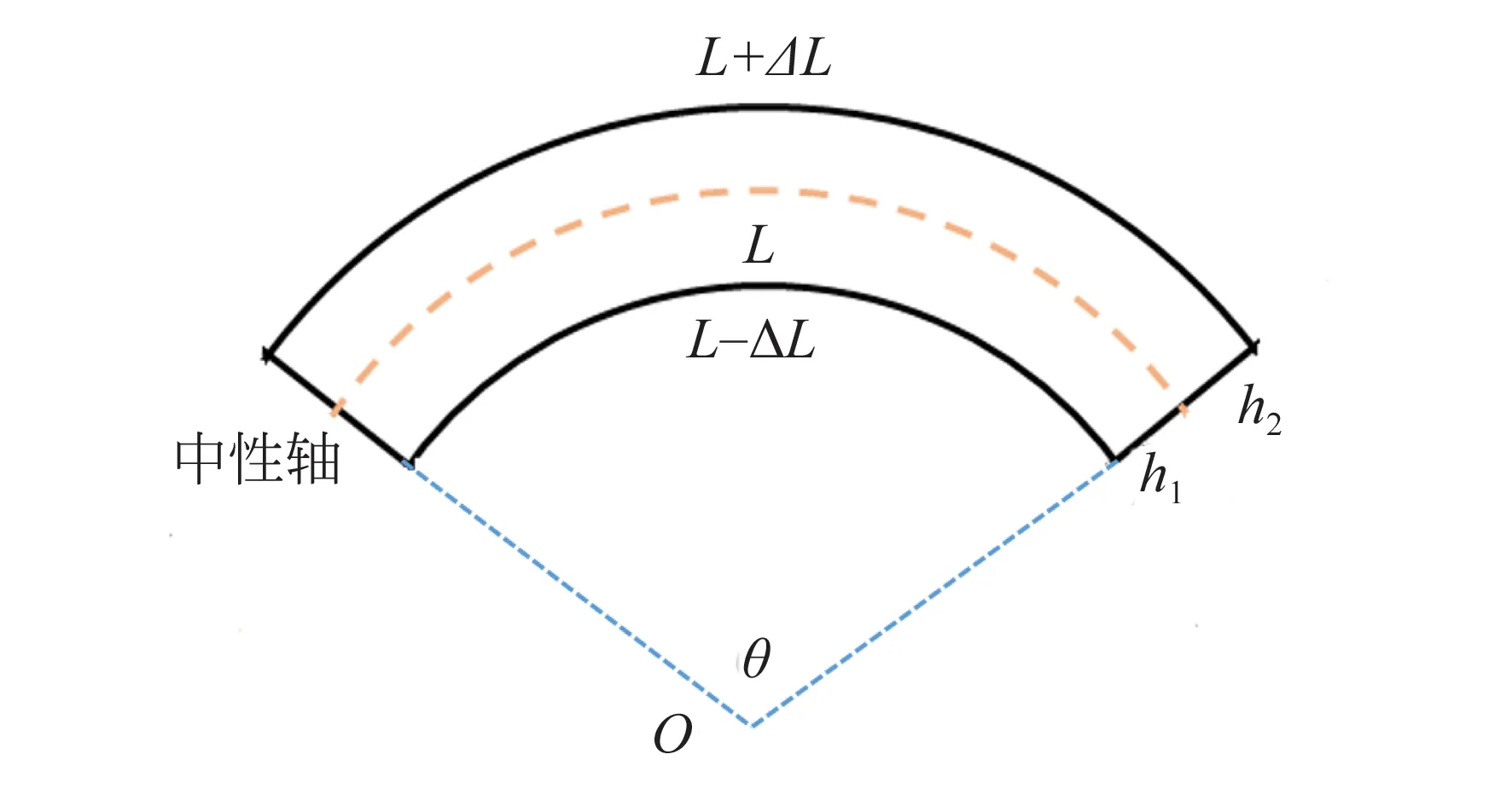
图18 多芯光纤弯曲后某微段示意图
多芯光纤与被测对象中性面的确定是一个需要重点关注的问题。Waltermann阐述了多芯光纤和被测微创介入设备如导管在不同连接方式下如何确定传感器的中性面,他根据“光纤簇”,被测导管以及中性轴的相对位置关系将形状传感器分为3种构型[7]。图19从左到右分别为光纤簇中心线位于导管中心线且和导管紧固连接,光纤簇中心线位于导管中心线外侧且和导管紧固连接,光纤簇中心线位于导管中心线且和导管非紧固连接。这3种光纤形状传感器发生变形时的中性面分别位于导管中心线,导管中心线以及光纤簇中心线。
虽然Waltermann是以多芯光纤和导管之间的排布方式为例来分析的,但是该结论适用于所有利用多根光纤紧密排列并利用其差异化的应变响应这一原理作为形状传感器的情形。
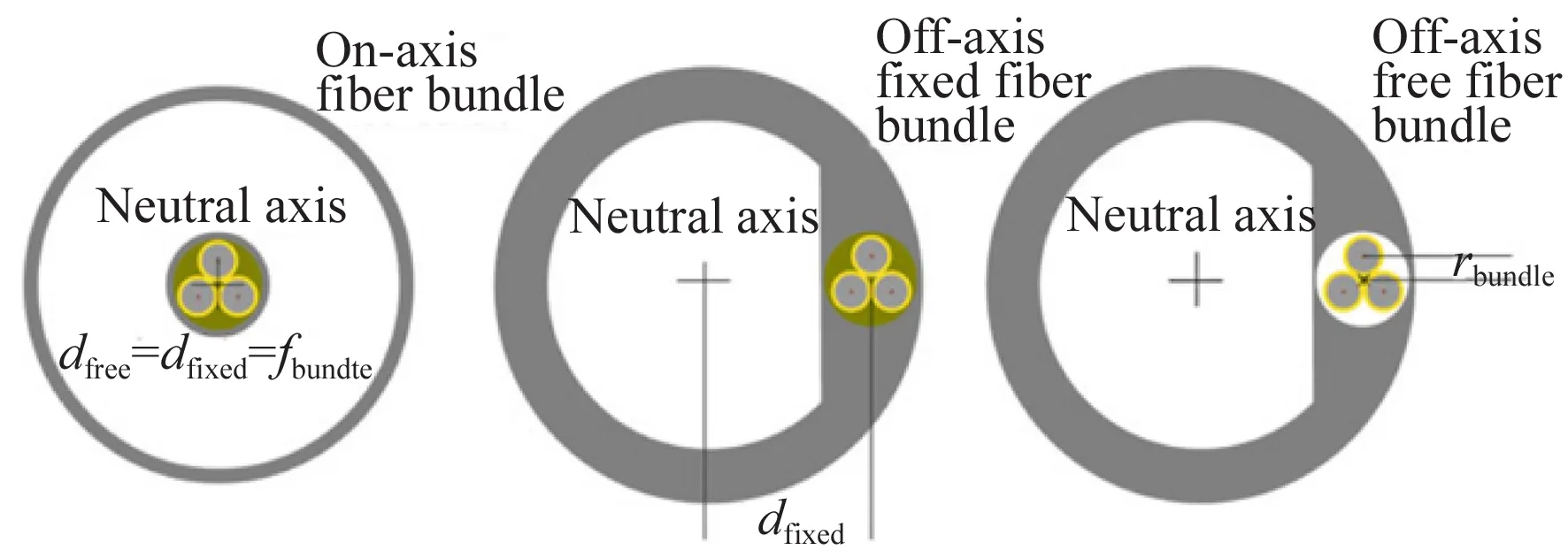
图19 Waltermann提出的光纤形状传感器和3种导管固定方式[7]
3.1.5 单模光纤包层波导
2015年,德国弗琅合费学院赫兹研究所(HHI) 采用飞秒激光脉冲将光纤光栅写入标准单模光纤的包层中,典型直径为9 μm。装置及测量结果如图20所示,传感器的最小弯曲半径达到了2.5 cm[49]。
3.1.6 比较
自封装形状传感器通常用于活检针等刚度大、曲率小的形状测量上,其直径通常在几个毫米。由于它通常粘贴在被测细长柔体外侧,其形状测量结果通常和被测对象重合。多芯光纤传感器更适用于曲率大、形状复杂的形状测量,同时由于其直径通常在几百微米,因此适用于测量一些体积小的场合,如医疗介入导管的形状追迹等。基于多芯光纤的形状传感器通常和被测对象不重合(和传感器和被测对象的相对位置有关)。此外,自封装形状传感器多采用离散的光纤光栅作为应变传感单元,其解调速度普遍可以达到kHz量级,解调方法成熟。而多芯光纤中测量应变的方式有基于光纤散射信号或者在多芯上刻写光栅,尤其多芯上刻写光栅技术上还不是很成熟,同时其解调设备复杂,解调速度较少超过kHz量级(尤其是基于散射信号的应变测量方式中)。多芯光纤由于各个纤芯之间的参数固定,几何误差相较于自封装式小,因此解调精度高,在采用螺旋纤芯设计后,基于多芯光纤的形状传感器精度得到进一步提高。但是由于自封装式传感器通常用在刚度大、曲率小,且多为平面形状且传感长度在几百毫米的场合,因此,自封装式也可以达到很高的测量精度。
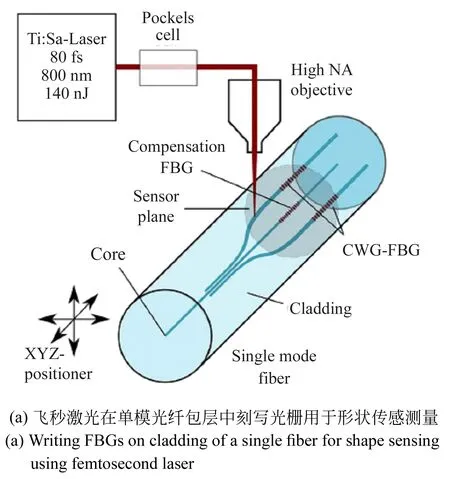
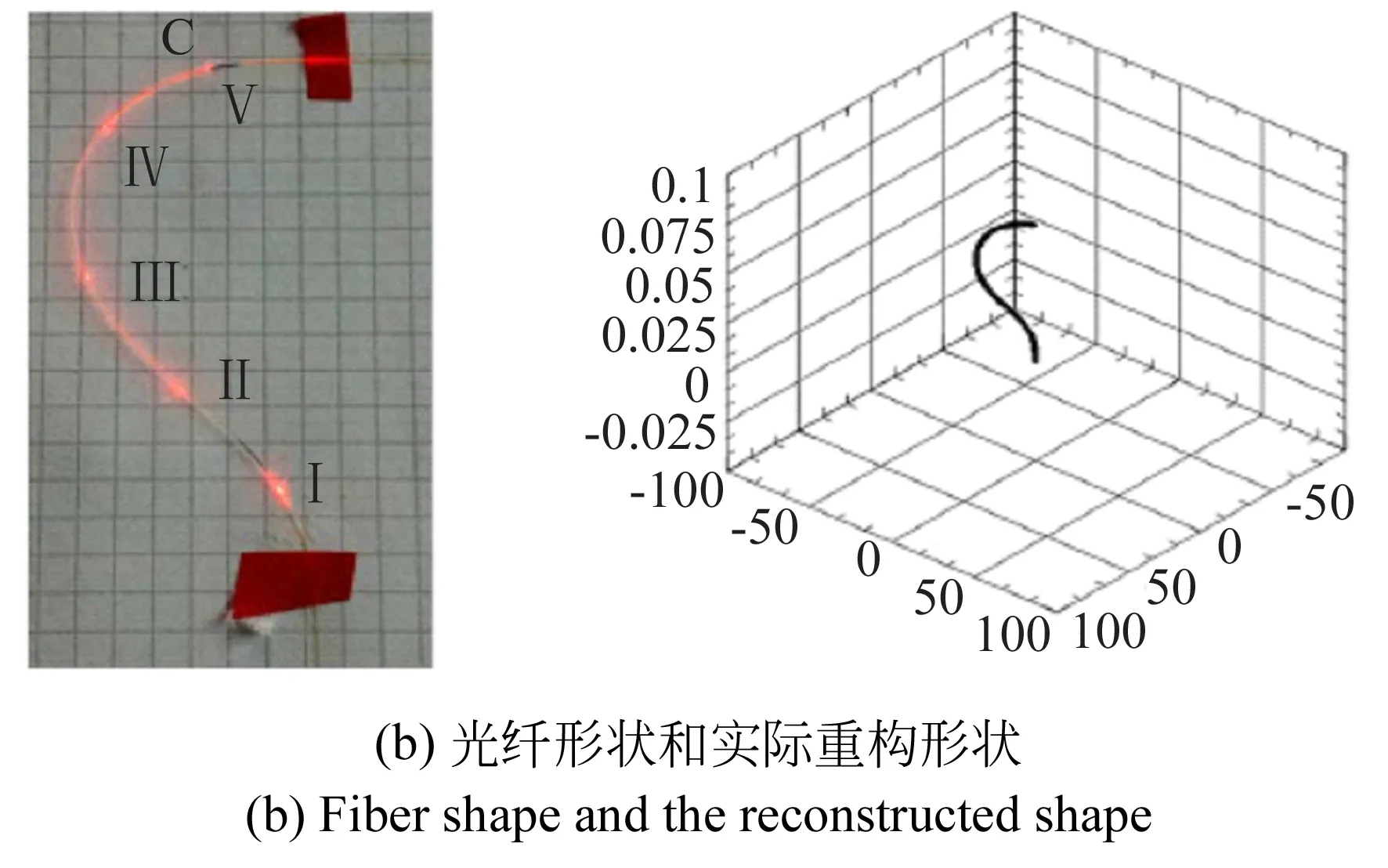
图20 飞秒激光写光纤光栅的装置及结果
3.2 分布式应变测量方法
在光纤形状传感技术中,一维分布式应变测量是形状测量的基础和前提。一维分布式应变测量系统可以获取沿光纤传输路径上随空间分布和时间变化的外界扰动信息,如应变、温度等。选用何种分布式传感方式取决于需要达到的重构精度,显然空间应变传感点数越多,应变测量精度越高,形状重构就越准确。实际上,我们可以从采样定理的角度考虑,对于空间形状变化剧烈(曲率梯度大)的场景或部分,应变采样点数应该越密集;对于空间形状变换缓慢(曲率梯度小)的场景或部分,应变采样点数可适当稀疏。仿真和经验表明,对于弯曲半径为50 mm的形状测量而言,至少应每隔5 mm有一个应变分布传感点。实际运用中,应根据使用场景和形状测量精度去选择合适的应变传感方式。此外,对于常见的一维应变测量系统而言,一般可以区分正应变和负应变(光纤发生拉伸和压缩)。同时,应变测量的量程也和光纤形状(曲率大小)直接相关,因此,一维应变测量系统应用于形状传感中也需要注意应变的最大可测量程。
采用经典的光纤光栅传感网络解调方式如时分复用(TDM)、波分复用(WDM), 基于可调谐激光器、光纤激光器和可调谐滤波器[50]等,可以解调以光纤光栅作为传感单元的光纤形状传感器各个位置的应变。目前,商用化的光纤光栅传感系统主要以波分复用技术为主,传感器的数量和测量范围受光源带宽限制。而时分复用技术采用的是脉冲光源,每个传感器在不同时刻可使用整个光源带宽,传感器测量范围宽,数量不受光源限制,但信噪比较低[47]。以上两种方式尤其是波分复用多应用于短距离形状传感器的光栅访问上。
除了基于光纤光栅效应的应变测量技术外,利用光纤内部散射效应的全分布式传感技术也可以获取光纤各个位置的应变分布。近年来,基于瑞利散射的光频域反射技术(Optical Frequency Domain Reflection, OFDR)、相位型光时域反射技术(phase-OTDR)、基于布里渊散射的光时域反射技术(BOTDA)、光时域分析技术(BOTDR)、基于拉曼散射的温度传感技术等光纤分布式测量技术都有望应用于不同场景下的光纤形状测量上。
根据文献[51-52]对各种分布式传感技术与方法的总结,目前已报道的空间分辨力可以达到厘米量级,适合于短距离(不超过几十米)形状重构的几种典型分布式传感技术与方法有:
(1)基于OFDR原理的分布式传感[37,53];
(2)密集光纤光栅阵列[54-55];
(3)长光栅[56-57];
(4)微波光子技术(MWP)[58];
(5)光学低相干反射测量(OLCR)[59]。
OFDR技术是由Froggatt和Moore于1998年提出并通过美国LUNA公司商用化的[60]。LUNA公司依据该原理研发了OBR系列(主要用于光纤链路诊断及静态分布式传感)以及ODiSI-B系列动态分布式测量商用化仪器。现有的比较成熟的方案是LUNA公司的ODiSI系列产品。基于光频域反射瑞利散射分布式应变测量原理,其基本思想是:瑞利散射是由于光纤中折射率随机波动引起的,对于给定的一段光纤,瑞利散射的散射幅度是随机的,但是瑞利散射又可以认为是光纤本身一种稳定的特性,所以可以把光纤中的瑞利散射视为一种弱的随机空间周期的布拉格光栅,外界应变会引起布拉格光栅光谱移动,同样,外界应变会引起瑞利散射光谱移动。这种瑞利散射光谱移动可以通过本地测量瑞利散射光谱(施加应变)与本地参考光谱(未施加应变变化)互相关运算得到,通过互相关的峰值位置就可以得到瑞利散射光谱的移动量。OFDR利用外差探测技术,光纤上不同位置对应的拍频不同,通过频谱分析可以获得光纤上各个位置的瑞利散射信息。上述解调过程是OFDR系统利用瑞利散射信号进行传感的最经典的方法。由于在光域上扫频范围可以很宽,因此在空间上分辨率就可以很高。光频域反射系统凭借它在短距离下的高分辨力与测量精度,在光纤形状测量上成为最有潜力的方式之一。同时,光频域反射系统不仅可以解调瑞利散射作为传感信号的形状传感器,同时也可以解调密集大容量光纤光栅阵列。其后的研究主要是围绕提高系统信噪比、提高动态测量性能以及提高光谱或应变分辨力这3方面来进行。近年来,天津大学丁振扬组[61]、电子科技大学欧中华组[62]、哈尔滨工业大学崔继文组[63],武汉理工大学的李政颖组[64]都研究了该技术,使之更适用于短距离下高精度、高分辨力的应变测量场合。
利用OFDR系统实现形状传感的示意图如图21所示。2012年,美国兰利研究中心的Moore将光频域反射系统结合刻写有光纤光栅的多芯光纤对多芯光纤本身的三维形状进行重构。2018年,加拿大学者Parent等人将基于OFDR访问的瑞利散射光纤传感技术用于微创手术的三维形状测量以及末端追迹[37]。在此之前,除了美国直觉外科、LUNA公司,荷兰飞利浦有过专利外,尚未有基于瑞利散射应用于医疗上的报道。
虽然OFDR在长距离(几十公里)下也可以进行传感,但是由于应变测量量程直接正比于光源调谐范围,而长距离下需要的高相干光源普遍受限于外调制的电学带宽(长距离OFDR一般使用超窄线宽激光器加外调制方案进行调谐,调谐范围只有几个GHz),导致长距离下的OFDR只有几十个微应变以下的应变范围[65],因此长距离下不适合采用OFDR解调技术来实现光纤形状传感。
虽然上述经典的OFDR系统与技术在分布式应变测量领域得到了一些应用,但是光频域反射系统中受限于瑞利散射信号自身强度的限制,且传感单元长度越短、信噪比越低,应变测量精度越低。在短距离、高精度的形状测量场合中,作者还没有看到通过OFDR技术利用普通单模光纤的固有瑞利散射来实现光纤形状传感的报道,其原因正如上面所述。为了增加传感信号的强度,加拿大蒙特利尔理工学院采用紫外散射增强瑞利散射方法,并采用图11的装置将瑞利增强后的光纤粘贴在一起形成120°排布的光纤簇,然后利用OFDR系统以及经典应变解调法求解分布式应变,其最终重构误差在1 mm以下[37]。2019年,AIDANA 等采用多路氧化镁微粒掺杂光纤实现了瑞利信号的增强,并利用OFDR系统实现了形状测量[66]。
尽管散射增强方法以及多芯光纤中刻写连续弱光栅可以提高传感信号的信噪比,获得更高的空间分辨力与传感精度,但是空间分辨力仍然没有达到OFDR系统的空间分辨力极限。为了解决OFDR系统存在的这个问题,2010年以来,LUNA公司采用相位累计方式利用瑞利散射对应变进行解调,和传统应变解调方式不同,这种方法以系统两点空间分辨力为单位追迹光场的相位变化,进而获取光纤的变形信息。根据LUNA在文献中的报道,该技术可以以百微米量级来追迹形状传感器的空间位置。该技术被用于美国LUNA公司开发的基于OFDR系统和相位追迹技术的螺旋多芯光纤空间位置探测系统中[14,67-68],后被应用于美国直觉外科公司的微创介入导航设备Ion中。LUNA的该项应变解调及形状传感技术虽然很有前景,但是未见国内外其他单位的跟进研究及报道。
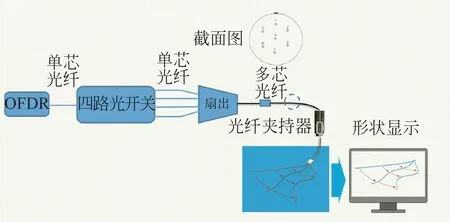
图21 利用OFDR系统实现形状传感示意图
对于长距离下的变形监测,需要选用适合于长距离应变测量的应变解调系统,其中最有代表性的为基于布里渊散射测量的BOTDR/A以及基于瑞利散射的phase-OTDR。
2016年,华中科技大学的唐明课题组首次验证了多芯光纤中外芯的布里渊频移和光纤曲率之间的线性关系[69],并利用分布式布里渊光时域分析(BOTDA)技术对多芯光纤的分布式曲率进行求解,其实验装置如图22所示,实现了分辨力为20 cm的曲率测量。但是受限于多芯光纤扇出接头的影响,反射率较大,只是分别测试了两个纤芯的布里渊增益谱,没有实现多芯的同时测量和解调,也没有构建出光纤的三维形状。但是该技术的优势不在于分辨力,而在于可传感长度较长。之后,哈尔滨工业大学的董永康课题组[70]及华中科技大学的刘德明课题组[71]进一步发展了BOTDA技术在光纤形状传感中的应用。2018年,南安普顿大学的Angeliki等人研究了用BOTDR技术作为应变信息获取手段对长距离多芯光纤进行重构测量[72]。2019年,瑞士洛桑联邦理工学院采用phase-OTDR实现了多芯光纤形状传感器的重构,由于phase-OTDR测量分布式应变的高灵敏性,获得了60 cm长度光纤末端0.05 mm的分辨力[73]。
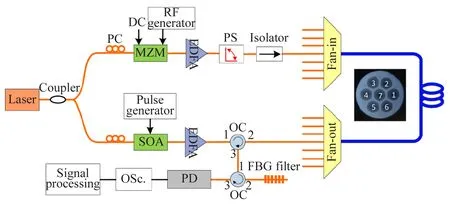
图22 基于分布式布里渊光时域分析技术的形状传感系统[69]
遗憾的是,以上基于布里渊分布式应变测量均是在实验室条件下对几米的光纤摆成固定曲率和二维形状的重构,没有给出长距离的整体形状以及三维形状测量结果。
上述报道的商用化基于布里渊的BOTDR/A, 其空间分辨力普遍还在米量级,而另外的BOFDA[74],DPP-BOTDA[75],BOCDA[76]等虽然商用化报道较少,但是在原理上,其空间分辨力可达厘米量级。虽然没有将它用于光纤形状测量的报道,但是可以预料,它们在高精度、长距离的空间形状测量上具有超过BOTDR/A的优势。
3.3 三维重构方法
在重构过程中,三维重构算法实现了由多路特定排布的光纤上的应变转化为传感器中心线空间位置坐标的功能,重构算法影响着位置求解的精度。
通常刚度较大的活检针的形状重构方法采用Euler-Bernoulli杆理论以及Rayleigh-Ritz方法[77-79]。这一方法将整个传感器分割为一段段曲率固定的微段,通过测得的应力求解空间变形。一般而言,该方法只适用于二维平面[77-78],文献[33]将它改进使之可以通过逐段求解与迭代来求解三维空间变形。
另一种重构算法则基于空间微分几何,它更适用于柔性体如多芯光纤形状传感器。2012年,美国NASA兰利研究中心的Moore对刻有光纤光栅阵列的多芯光纤的形状进行重构[40-41],首次阐述了采用基于弗莱那框架的空间微分几何重构方法,将光纤等效为基尔霍夫杆模型。在曲率参量外引入挠率来评价非二维弯曲。这种方法将空间分布的应变转化为曲线的特征参量曲率和挠率,利用三维空间中曲线切向、法向和副法方向之间的弗莱纳公式(Frenet-Serret Formulas),通过分布式传感方式解算光纤中各个位置的应变值,并用数值方法对微分方程进行求解,从而得到多芯光纤在三维空间的位置。
2012年,Todd对基于分布式应变信息的三维重构算法展开了进一步的研究[80-81],他指出基于弗莱那框架的重构算法在曲线方向改变时,弗莱那框架求解会出现奇异点,使得曲线重构出现误差。2017年,韩国学者指出采用数值解法求解基于弗莱那框架的微分方程中,采用四阶龙格库塔数值解法中的有限位数会引入截断误差,使得弗莱那框架失去正交性[82-83]。文中发展了一种基于几何操作的弗莱那框架求解方法,把每一个小段等效为螺旋微段,通过一系列几何操作将曲线各个位置的弗莱那框架求解出来,进一步克服经典弗莱那重构算法的问题。但是该文献仅仅给出了仿真,且采用其方法所提高的精度十分有限。上海大学的朱晓锦等人与上面所述的方法有所不同,通过将运动坐标系和曲率矢量,密切平面结合的重构算法对空间光纤进行了仿真和实验[84],但是最后仅仅给出了程序的可视化界面,并未给出精度与误差分析。2017年,崔继文等人给出了多芯或多路规则排布光纤在弯曲变形下的应变仿真方法,并采用平行传输框架求解光纤空间位置,理论上得到了比采用弗莱那框架更高的位置精度[85],其效果得到了实验验证[86]。
除了对重构算法的研究外,学者们建立了多芯光纤由应变到形变的仿真模型,并对参数进行优化以及对重构过程进行误差分析。2014年,Kristen等人分析了基于光纤光栅的医用手术针追迹形状传感器的误差[87],建立了误差传播的数学模型,对波长测量精度,传感器几何安装误差以及不同的传感器构型和插值方法都做了仿真分析。尽管如此,这些分析大多针对的是手术针模型,长度短且弯曲变形简单的情况,针对柔性导管或者多芯光纤的形状重构尚未有完整的仿真分析方法来模拟误差来源。2013年,德国卡尔斯鲁厄理工学院Ledermann等人对基于光纤光栅的三光纤集成形状传感器进行了模拟仿真[88],并于2014年提出一种非线性补偿算法[89],来补偿由于三光纤上光栅蚀刻位置的微小变动引起的形状失真。2019年,Florisa 等人通过蒙特卡洛法对基于多芯光纤的形状传感器的测量结果进行不确定度分析,得到了几何参数等对测量结果的影响[90-91]。
3.4 误差来源及局限
光纤形状传感中的几个误差来源以及局限性如下:
(1)若采用基材外加光纤或者在被测圆对称表面加光纤的传感构型,则基材表面或被测圆柱的几何误差会引入到形状重构中。虽然逐段校准可以减小这一误差,但是过程繁琐复杂,容易出现错误。因此选用多芯光纤可以降低形状传感器的几何误差,进而提高重构精度。
(2)重构形状和空间绝对坐标的对应关系无法准确确定带来的误差。对于长距离精度要求不高的变形测量场合一般不需要将重构形状转换到绝对坐标系下,但是对于医疗中如微创介入手术中导管定位而言,光纤在体内的位置一定要对应到绝对坐标系下,或者和核磁共振等图像坐标系重合。一般来说,通过控制重构起始点横截面的空间方位可以得到重构空间坐标系相对于世界坐标系的相对关系,但是对多芯光纤这样直径尺寸只有几百微米的结构而言,想要精确确定光纤起始端面中各个纤芯的空间排布尤其是方位角是很困难的。另外,可以对起始段施加特定曲率的弯曲,根据应变输出来确定纤芯方位角以确定重构起始值。此外,还可以通过导入可见光并结合高倍显微镜确定纤芯方位。但是上述方式都不可避免地会引入误差。
(3)初始位置形状带来的误差。一般为直线,但是长距离形状传感的初始形状较难已知,导致该误差引入到最后的重构结果中[92-93]。初始形状的校准是一个需要研究的问题。
(4)现有的一维应变解调系统无论是基于散射的还是光纤光栅的,其响应均是应变和温度的函数,因此形状传感中需要将温度这一参量进行分离。对于多芯光纤构成的形状传感器,可以利用中间纤芯作为共模补偿信号以消除温度和轴向拉伸的影响。
(5)光纤传感器本身和被测对象的不重合。以图19所示的后两种构型为例,当多芯光纤按照非紧固连接固定在导管的外母线上时,多芯光纤形状传感器恢复出来的形状以及空间位置是多芯光纤轴线的轨迹,并不是导管的中心。对于要求测量精度高的场合,需要由形状传感器的空间位置求解被测对象的空间位置。
(6)光纤形状解算中的误差累积与放大效应。光纤形状解算中,如前边所述的空间微分几何方法中,光纤形状传感器空间位置的解算是逐步递推的,也就是下一个点必须以前一个点作为新的起点。因此,后一个位置的空间位置精度受其前一个位置的空间位置精度影响,因此会产生累积误差。另一方面,如果前一部分的形状与真实形状存在某一个角度的偏离,那么随着长度增加后面各个位置会愈加偏离真实位置,该误差是放大效应。
此外,对一些短距离的场合除了要求精度高外,还需要实时性高(尤其是医疗领域),这一点除了从重构算法上进行优化外,还需要从硬件上如运用更高速度的CPU或者采用GPU或FPGA并行计算来提高应变解调与形状重构速度。
4 结 论
光纤形状传感技术相较于传统基于电学技术的形状测量方式,无需复杂的布线和连接多个传感器,可以大大减小布设难度,并且能够应用在很多电学传感方式无法使用的场合。光纤的小尺寸使它易于集成到被测对象上,光纤传感器不受外部电磁场的影响进一步拓展了其应用场合。在关键技术方面,传感器设计、分布式应变测量方法以及三维重构算法是近年来研究最多的几个方向。不过,光纤形状传感技术走向应用,尤其是和具体测量场景的结合还存在很多问题和挑战,这将是光纤形状传感技术进一步研究与发展的方向。