乐山市绿心路信号线控方案优化设计
2020-03-06徐桃让蒋阳升
徐桃让,赵 斌,蒋阳升
乐山市绿心路信号线控方案优化设计
徐桃让,赵 斌,蒋阳升
(西南交通大学,交通运输与物流学院,成都 611756)
针对乐山市绿心路部分路段交通效率低下的问题, 在完成交通调查的基础上分别使用图解法和Synchro并结合渠化措施对其进行信号线控方案的优化设计, 然后使用VISSIM分别对现状配时方案和两种线控方案进行仿真评价。结果表明两种线控方案控制下主干道的延误、停车次数等参数均小于原配时方案, 且在相同时间内均能通过更多的车辆数。进一步比较两种线控方案得知, 基于Synchro的线控方案能使线控系统整体的延误等参数更小, 而基于图解法的线控方案能让干道通过的车辆数更多, 证明两种线控方案具有各自的优势, 从而为不同的控制需求提供了多样化的选择。
交通工程;干道信号协调控制;Synchro;图解法;乐山市绿心路;VISSIM仿真
0 引 言
干道交通信号协调控制是优化干道交通运行的常见方式,国际上信号配时方法常用的有英国的TRRL法、澳大利亚的ARRB法、美国的HCM法等,已用的系统有TRANSYT、SCATS、SCOOT、Synchro,以及VISSIM等[1]。国内常用的信号配时方法有“停车线法”和“冲突点法”等[2]。在系统应用方面,早期我国大多数城市引进的是采用实时自适应控制的SCOOT和SCATS系统。
对这几种控制系统而言,SCATS和SCOOT系统均以饱和度限制作为系统优化的目标,对于过饱和交通流的控制效果并不是很理想。TRANSYT通过比较不同方案的延误和停车次数确定最终方案[3]。相比之下,Synchro内部使用了HCM2000中提供的韦伯斯特延误模型[4],通过控制延误和百分比延误这两个参数评价交叉口服务水平,故能更加精确、合理地适合于信号配时方案的调整和优化。基于Synchro的研究应用比较多[4-13],郑长江等[5]以T型交叉口的控制延误、排队长度和服务水平为指标,使用Synchro对其进行配时优化,结果表明优化后的控制效果得到极大改善;曹凌峰[6]选取了三个交叉口作为协调控制交叉口,并分别应用Synchro建立了基于原交叉口配时方案参数和基于Synchro优化的单个交叉口配时参数的协调控制系统;白龙等[7]使用Synchro得到了宁波通途路部分路段的信号绿波时距图,并通过Simtraffic仿真证明优化后的交叉口延误率、路段平均车速、排队现象等得到了显著改善。
除了使用信号配时系统,图解法也是优化协调控制相位差的常用方法[14-16],通常情况下通过图解法可以实现通过带宽最大化。李鑫等[14]以高德大数据获取的路段平均速度为基础,使用图解法得到了绿波带模型的相位差,并以实际浮动车测试和高德拥堵指数评价了协调控制的效果,结果表明高德拥堵指数下降了3.7%,协调效果得到改善。Lin Guo[15]在MATLAB中用图解法完成了对四个交叉口的协调控制,并通过实例验证了该方案比原配时方案具有更优的控制效果。
在控制效果的评价方面,VISSIM是一种微观并基于驾驶行为和时间间隔的仿真建模工具[17]。它既可以通过交通建模可视化交通运行状况,也可以通过运行仿真输出排队长度、延误、停车次数等参数用于量化分析和评价,因此是常用交通方案仿真平台。
由于在计算协调控制的关键参数时,Synchro是以系统延误等参数最小为优化目标,而常用的图解法、数解法则以通过带宽最大为目标,因此本文分别使用Synchro和图解法并结合适当的渠化方案对乐山市绿心路三个交叉口进行信号协调控制方案的设计,然后通过使用VISSIM对现状控制方案以及两种信号线控方案进行仿真比较。一方面获得改善该干道运行的控制方案,另一方面也进一步验证和探究这两种不同的信号协调控制参数优化方法各自优势所在,便于在实际工程应用中根据控制需求进行选择。
1 方法介绍
1.1 基于图解法的线控方案设计方法
使用图解法计算线控系统相位差时首先需要确定线控系统的公共周期,关键步骤如下:
(1)确定单个交叉口的周期时长,多用韦伯斯特法,按下式确定:

(2)确定线控系统的公共周期C
一般将前面计算出的周期最大的交叉口作为关键交叉口,关键交叉口的周期即为线控系统的公共周期。
(3)确定线控系统中各交叉口各相绿灯时长
关键交叉口各相绿灯时长等于单点配时计算得到的结果。各交叉口在各自的协调相位保持的最小绿灯时长等于关键交叉口协调相位的绿灯显示时长,即:
式中,L表示关键交叉口总损失时间(s);y表示关键交叉口协调相位临界车道车流比;Y表示关键交叉口各相临界车道车流比之和。
② 确定非关键交叉口非协调相位的最小有效绿灯时间。
非关键交叉口非协调相位在其交通饱和度x达到实用限值(一般取0.9)时[18],有下式成立:
③ 确定非关键交叉口协调相位的有效绿灯时间t:
式中,L表示非关键交叉口总损失时间(s);表示非关键交叉口非协调相位的总个数。其余符号意义同前。
(4)确定线控系统相位差
如图1所示,首先根据线控系统中各交叉口的配时方案和实际位置建立时间-距离图,从第一个交叉口开始作速度推进线,令其斜率等于设计车速的倒数。速度推进线决定了各个交叉口协调相位绿灯时间的起点,并以速度推进线为基准作平行线形成宽度为min(最小绿灯时间)的通过带[19]。在保证协调方向最小通过带的基础上可进一步根据双向平均每车道直行车流量比例确定双向绿波带宽。
图1 图解法示意图
1.2 基于Synchro的线控方案设计方法
使用软件Synchro进行线控方案设计时首先需要将调查获得的基础数据输入车道窗口和流量窗口,后续优化的思路和步骤如图2所示。
(1)系统周期时长优化
Synchro默认的线控系统周期范围为50至150 s,步长为10 s,优化系统周期时Synchro会从最小周期开始按步长递增,寻找使得性能指标最小的周期长度作为最佳周期时长,性能指标确定如下所示:

式中:P表示性能指标;D表示总延误(s),包括控制延误和排队延误两部分;S表示排队长度(veh)。
(2)系统相位差及绿信比优化
优化相位差是进行协调控制的最后一步。Synchro优化系统相位差时以最小延误或接近最小延误为目标,通常以步长为1或4 s进行。
在优化相位差的同时可以选择优化绿信比(在优化系统周期时绿信比会同时得到优化)。Synchro首先会尝试分配绿灯时间以满足90%的车道流量,如果不能满足则考虑70%和50%的车道组流量,剩余的绿灯时长会分配给主要协调相位。
2 现状分析
以乐山市绿心路三个相邻的交叉口(绿心路-绿心路环线交叉口(编号A)、绿心路-竹公溪路交叉口(编号B)、绿心路-朝霞路交叉口(编号C))为例,三个交叉口之间的位置及间距如图3所示。首先对其进行交通调查,调查方式为人工调查,内容包括各个交叉口渠化方案、信号配时及交通流量的调查(流量以晚高峰17:00~18:00为例)。

图3 绿心路交叉口示意
2.1 转向流量
流量调查时段为晚高峰,各个交叉口的流量调查结果如表1所示。
表1 各交叉口流量调查结果
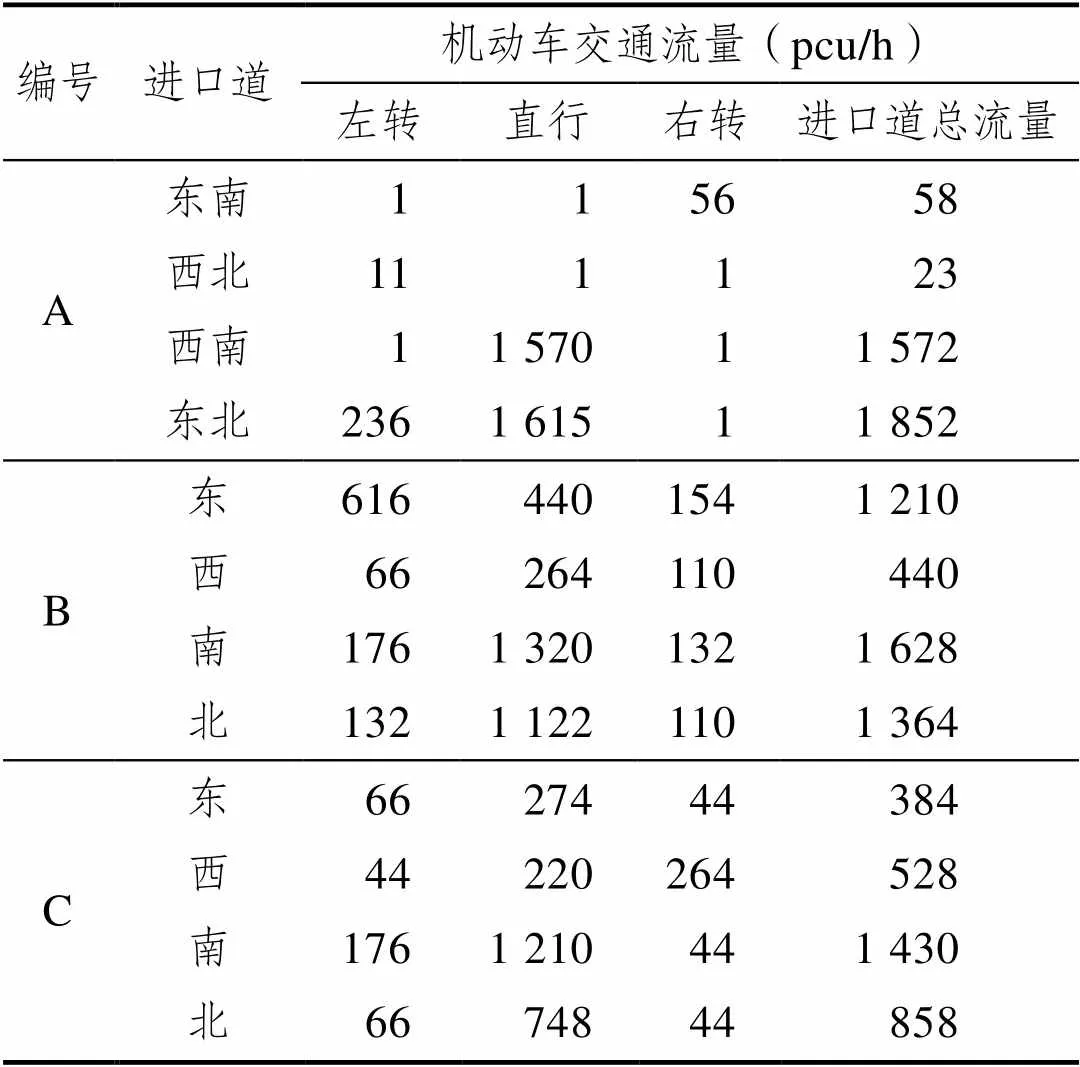
Tab.1 Traffic survey results of vehicular volume at each intersection
2.2 配时方案
现三个交叉口均采用定时控制。交叉口A两相位配时,周期长106 s;交叉口B采用四相位控制,但存在相位的早启和迟闭组合,周期时长166 s;交叉口C三相位控制,周期时长165 s。具体各交叉口各相绿信比如图4所示。

图4 各交叉口现状信号配时方案
2.3 问题分析与优化设计思路
在调查中发现该路段各交叉口在红灯期间存在较严重的排队溢出现象,进一步分析原因可知该路段各个交叉口的信号控制相互独立,信号控制的协调性较差,因此为提高控制效率可考虑进行信号协调控制。
使用不同的线控优化方法可以得到不同表现性能的线控方案。为获得适合该干道的线控方案,同时进一步验证和比较图解法和配时软件Synchro两者的优势,使用图解法确定线控系统相位差,而使用软件Synchro优化线控方案的参数,优化思路如图5所示。
3 线控方案的设计
3.1 基于图解法的线控方案设计
3.1.1 单交叉口配时方案
通过前面所述的方法计算得到交叉口A的周期长为44 s,交叉口B的周期时长为522 s,由于理论值过大,故按照实际工程经验取为150 s。交叉口C的周期时长为113 s,故关键交叉口为交叉口B,公共周期时长为150 s。计算得到交叉口B协调相位(南北方向直行车辆)的绿灯时间为53 s,故线控系统协调相位最小绿灯时长为53 s。在满足最小绿灯时长的基础上对关键交叉口的配时方案进行相位的合理搭配,并对非关键交叉口的各相有效绿灯时长进行调整,计算得到线控系统中各个交叉口的配时方案如图6所示(具体的调整、计算步骤略)。
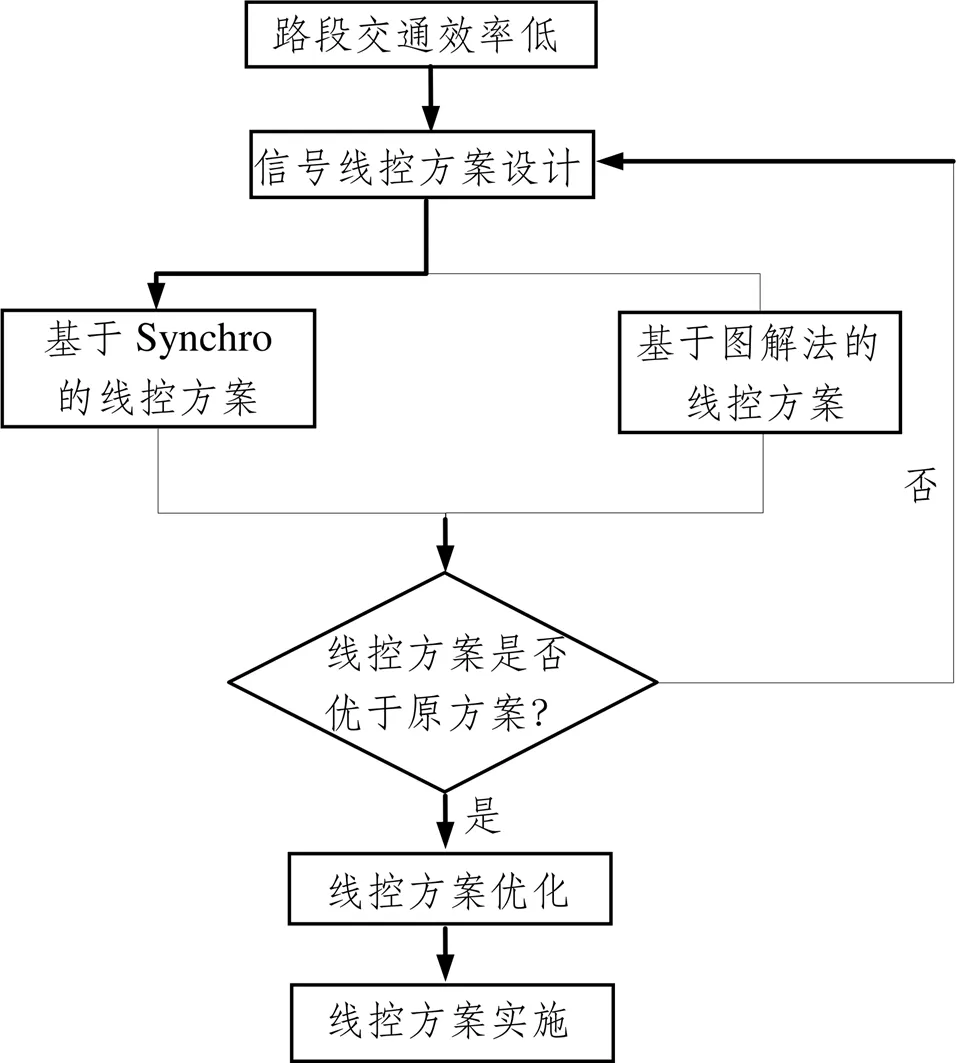
图5 优化设计思路
3.1.2 线控系统相位差
为简化描述,将主路绿心路交通流量大的方向定义为线控系统中的正向,即定义绿心路由南至北为正向,由北至南为反向。
(1)绘制速度推进线确定绿波带速。在时-距图中作斜率为0.1(此时斜率为0.1,其倒数为10,即对应36km/h的带速)的直线。

图6 图解法方案中各交叉口配时方案
(2)调整相位差,在满足正向最小绿灯时间为53 s的基础上使正反向带宽等于或接近1.2(通过计算得到正反向直行车流量比为1.2)。调整后的时-距图如图7所示,正反向带速均为36 km/h,正向带宽53 s,反向带宽41 s;以交叉口A绿灯起始时间为基准,沿车流正向行驶方向相位差均为40 s。
3.2 基于Synchro的线控方案设计
3.2.1 单交叉口配时方案
依据前面所述的方法和步骤,在Synchro中首先创建路网,输入各进口道的流量,优化各个交叉口的周期和绿信比,以及线控系统的周期,得到各个交叉口的配时方案如图8所示。由图8可知线控系统公共周期为150 s,每个交叉口的黄灯时长均为3 s。
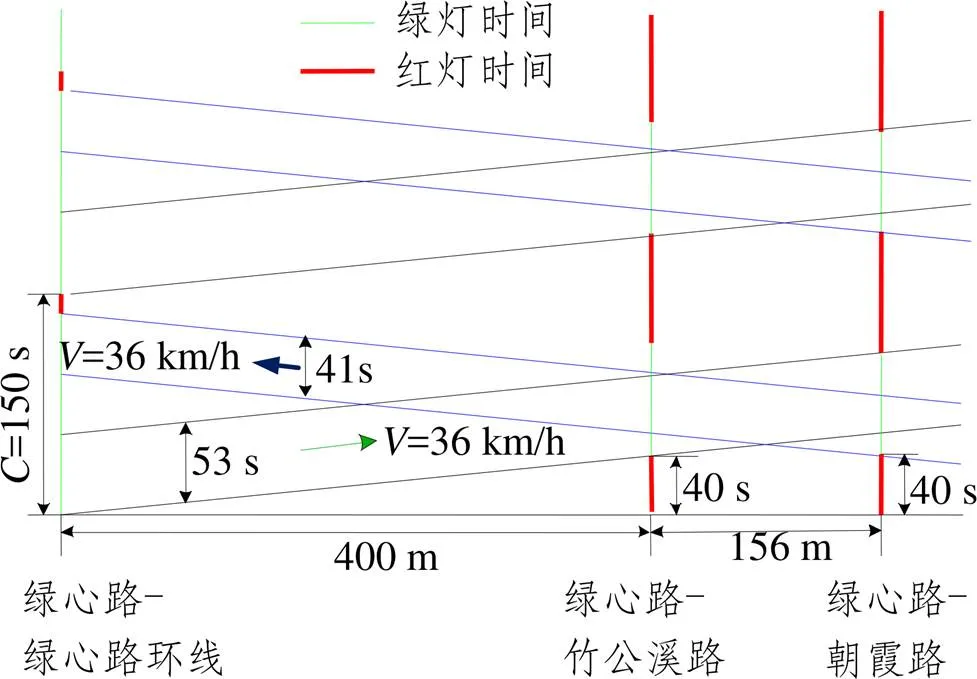
图7 基于图解法的线控方案时-距图
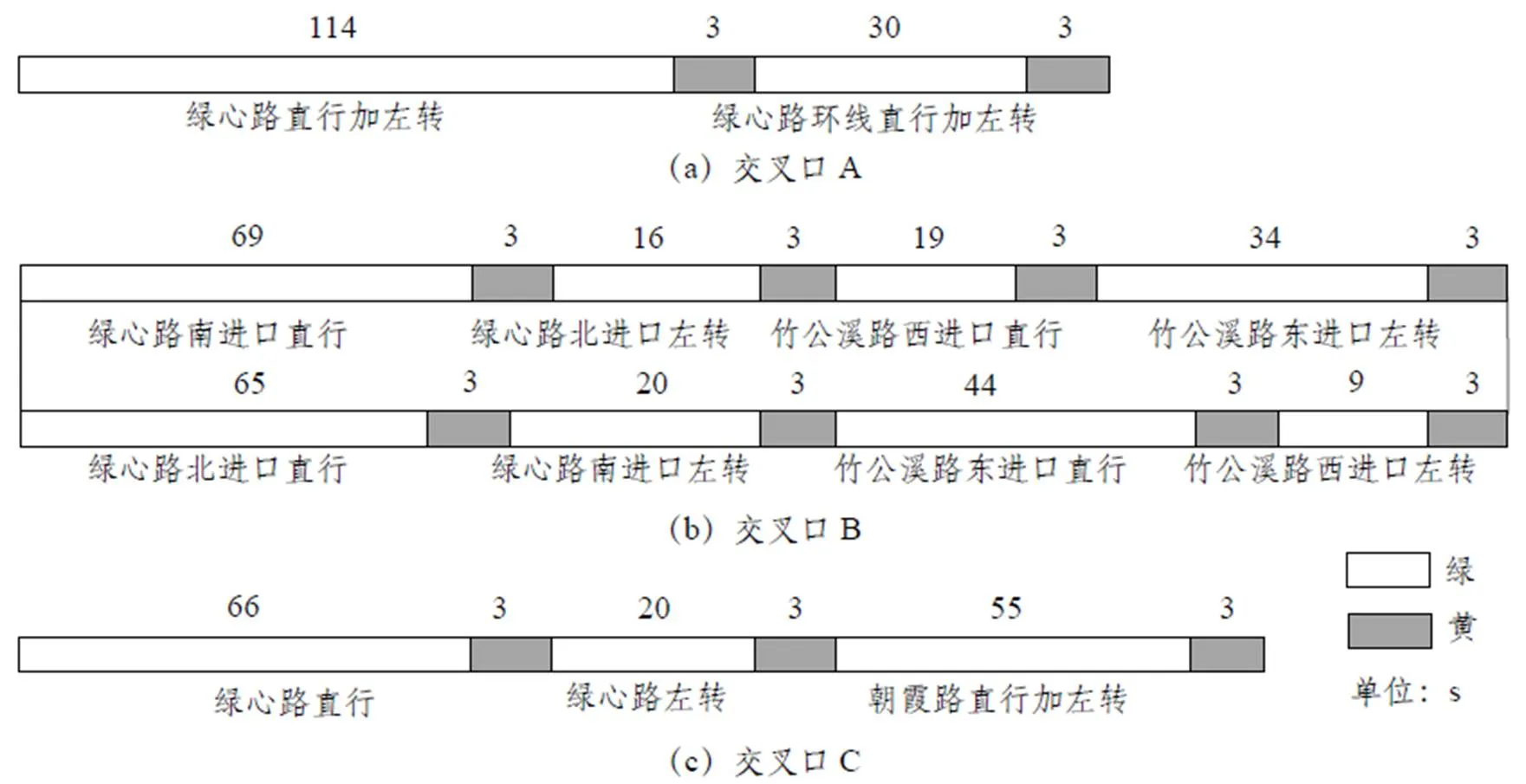
图8 Synchro方案中各交叉口配时方案
3.2.2 线控系统相位差
将路段的设计速度设为36 km/h,最后一步优化线控系统相位差,优化后的线控系统时距图如图9所示:正向带宽40 s,反向带宽30 s;以交叉口A为基准,正向上相位差依次为15 s,29 s。
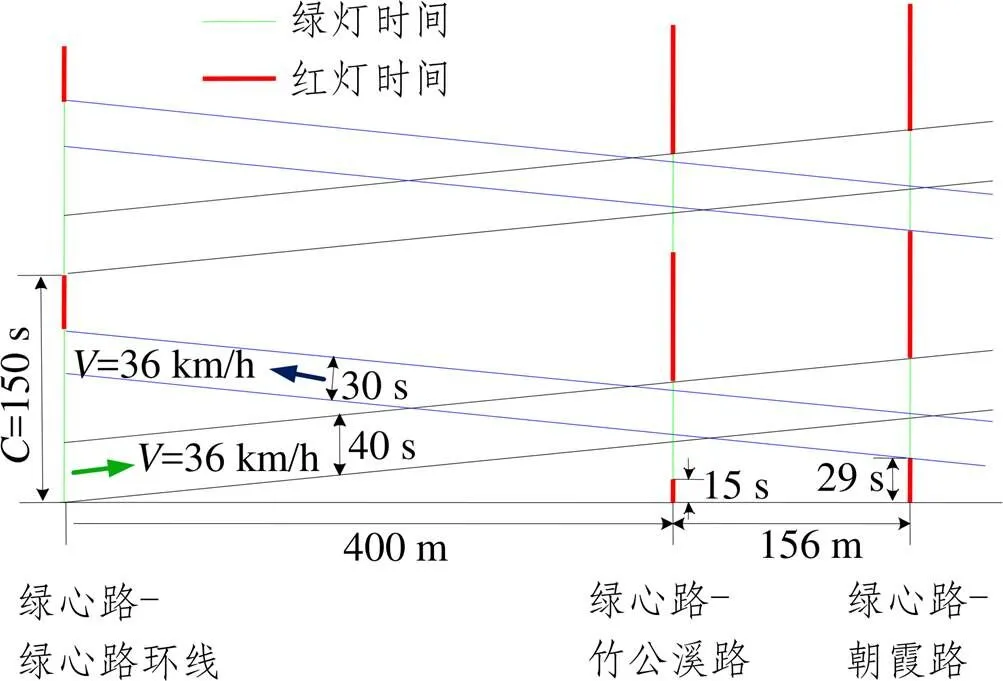
图9 基于Synchro的线控方案时-距图
4 仿真与评价
4.1 线控方案优化
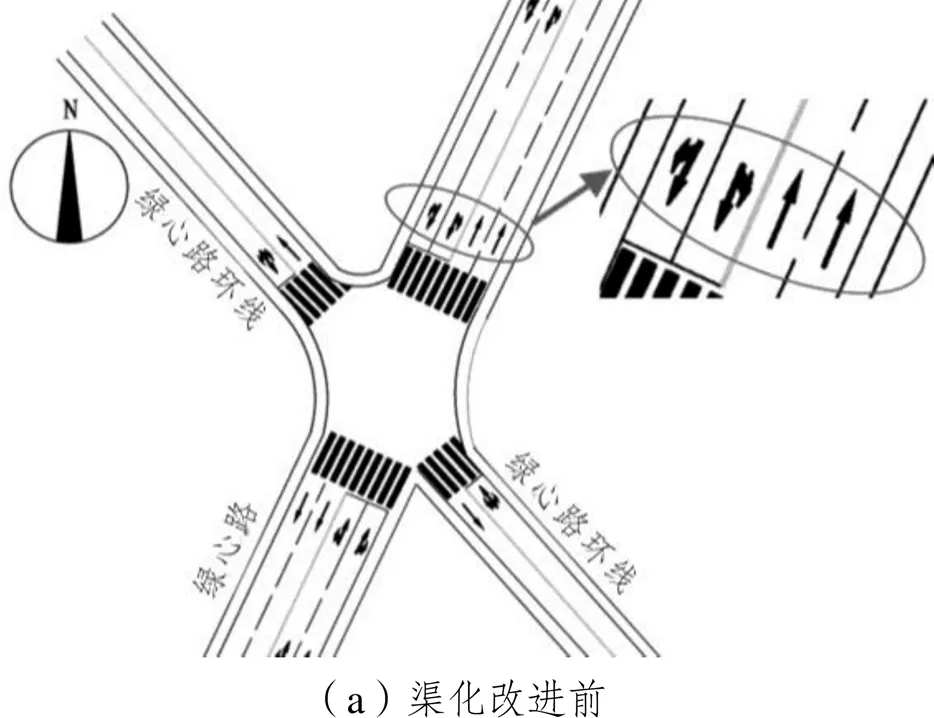
将线控方案在VISSIM中进行仿真后发现反方向交叉口A比较拥堵,进一步结合渠化和配时方案分析,可知原因在于该交叉口北进口直行和左转同相位同车道放行,渠化方案如图10(a)所示。由于南北方向该交叉口对向直行车流量比较大,因此北进口左转车辆即使在绿灯时间也需要排队等候对向直行车流间隙通过,进一步使本车道左转车辆后的直行车辆排队,从而造成了该交叉口的拥堵。
具体的改进措施为:在交叉口A北进口道向右拓宽一条车道,车道宽度仍为3.5 m,此时车道功能由左至右依次设置为较左、直行、直右,如图10(b)。
改进后该进口道的直行和左转采取同相位放行,即配时方案不变。此时左转车辆仍需等待对向直行车辆间隙通过,但由于与本向直行车辆车道分离,故不会在排队期间阻挡本向直行车辆的通行,从而减缓该进口道的拥堵。
4.2 评价指标
完成线控方案设计和渠化改进后,对原控制方案和两种线控方案分别进行评价,评价内容包括干道评价和支路评价两个部分。干道评价指标包括行程时间、车均延误、车均停车时间、车均停车次数以及通过的车辆数;支路评价指标包括最大排队长度、平均排队长度以及车均停车延误。指标“通过的车辆数”值越大表明方案控制效果越好,其余指标值则越小越好。
4.3 仿真结果
4.3.1 干道评价结果
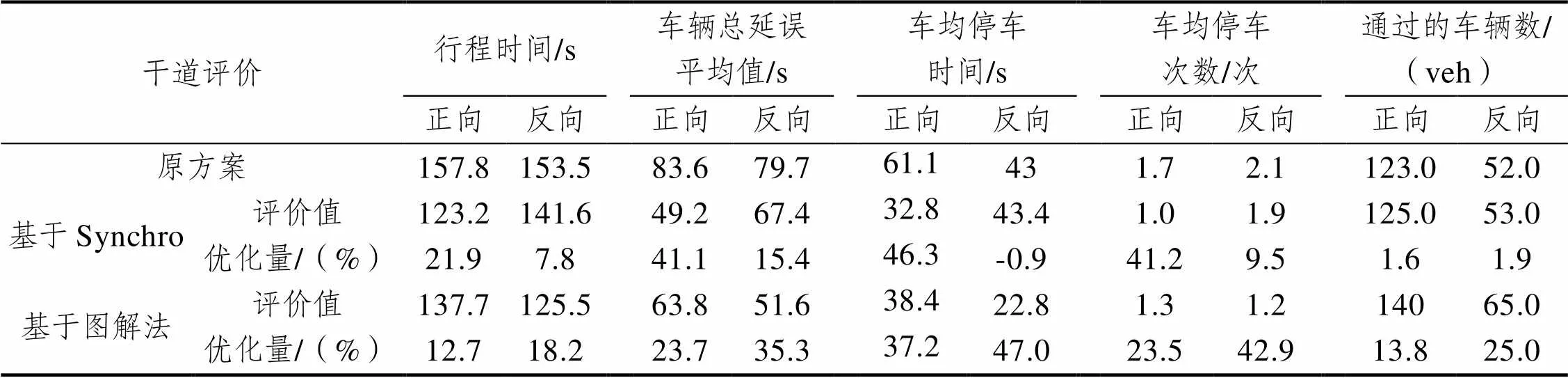
在VISSIM分别输入三种不同控制方案(原方案、基于图解法的线控方案以及基于Synchro的线控方案)的控制参数,仿真得到三种信 号配时方案的主干路各项参数评价,结果如表2所示。
表2 三种配时方案干道评价参数对比
Tab.2 The comparison of arterial evaluation parameters in three kinds of timing scheme
通过表2可做以下对比分析:
(1)与原配时方案相比
① 从表中可以看出,基于Synchro的线控方案除了反向路段的一个参数(车均停车时间)优化量为负值(-0.9%)外,其余所有延误参数的优化量皆为正值,表明基于Synchro的线控方案在控制延误参数方面整体优于原配时方案;同理,基于图解法中所有的优化量均为正值,故基于图解法的线控方案在控制延误参数方面也要优于原方案。
② 两种线控方案控制下通过的车辆数均大于原配时方案,说明通过效率均高于原配时方案。
(2)两种线控方案相比
① 对比两个评价值可以发现:正向上除“通过的车辆数”以外,基于Synchro线控方案的各项延误参数均小于基于图解法的线控方案;反向上基于图解法的线控方案的各项延误参数则均小于基于Synchro的线控方案。
② 基于图解法的线控方案在正反向通过的车辆数均大于基于Synchro的线控方案,表明基于图解法的线控方案更能实现双向带宽最大。
4.3.2 支路评价结果
支路最大排队长度可用来反映线控方案是否需要调整,若其超过与支路上最近交叉口之间的距离,说明拥堵影响到了支路上相邻的交叉口,此时需要根据情况对主线配时方案进行调整。根据实际调查,交叉口A距离支路上相邻最近交叉口的距离约为1600 m,交叉口B为386 m,交叉口C为180 m,三种方案的最大排队长度分析结果如表3所示。

表3 支路最大排队长度分析
支路平均排队长度和停车延误的评价结果如表4所示。

表4 支路评价参数对比
(1)与原配时方案相比
由表3可知,两种线控方案下三个交叉口支路的最大排队长度均小于其与相邻最近的交叉口之间的距离,故对支路的影响都在可接受范围内。
(2)两种线控方案相比
从表4中可以看到除交叉口A的平均排队长度外,基于Synchro的线控方案在三个交叉口支路的平均排队长度和停车延误均小于基于图解法的线控方案,因此证明了基于Synchro的线控方案在控制支路延误方面更优于基于图解法的线控方案。
5 结 论
本文首先介绍了常用的信号协调控制方法,然后以乐山市绿心路为例,首先对其展开了交通调查,然后分别使用图解法和Synchro法对绿心路进行信号线控设计及渠化改进。最后借助仿真软件VISSIM,分别对原配时方案和两种线控方案进行仿真评价,并对比得出以下结论:与原方案相比,在主路层面两种线控方案均能提高车辆通过数和减少延误、停车次数等;在支路层面两种线控方案对支路的影响都在可接受的范围内;两种线控方案相比,基于Synchro的线控方案在主路正向延误上小于基于图解法的线控方案,而后者则在主路双向带宽和反向行程延误上更优于前者,且基于Synchro的线控方案在支路产生的延误要小于基于图解法的线控方案。总体而言,基于Synchro的线控方案在控制系统总延误上优于基于图解法的线控方案,而后者则趋于使主路双向通过带宽更大。
公交车行驶速度低,需要多次停靠,因此实现公交车优先通行对绿波控制方案有一定的影响。文章在进行信号线控方案设计时没有考虑公交优先通行。除了公交车,转弯车流到达交叉口在时间上具有随机性,红灯期间到达后引起的排队也会影响绿波控制方案的效果,因此后续研究可以进一步通过考虑更多的影响因素实现更优的控制效果。除此以外,由于仿真与现实之间存在的差异,文中线控方案在现实中实施后的改善效果可能与仿真结果并不完全一致,还需进一步验证。
[1] 邓兴婷. 基于Synchro-VISSIM的干线协调控制优化研究[J]. 交通标准化, 2014(17): 17-21.
[2] 吴兵, 李烨. 交通管理与控制[M]. 北京: 人民交通出版社, 2009.
[3] 曲喆. 基于TransCAD和Synchro的交通影响评价分析[J]. 智能城市, 2016, 2(04): 248-249.
[4] 侯淼, 何子伟, 贾志绚, 等. 基于Synchro仿真的交叉口渠化与信号配时协调优化[J]. 交通标准化, 2014, 42(13): 24-27+31.
[5] 郑长江, 卢冲, 马庚华, 等. 基于Synchro的典型T型交叉口信号配时优化研究[J]. 贵州大学学报: 自然科学版, 2018, 35(01): 110-114+119.
[6] 曹凌峰. 基于Synchro的绿波协调控制仿真研究[J]. 内蒙古公路与运输, 2017(01): 52-54, 61.
[7] 白龙, 白芳舒, 杨凯. 基于Synchro进行多交叉口信号配时优化的应用[J]. 黑龙江交通科技, 2016, 39(01): 132-134.
[8] 王凤鸣, 孙言涵, 张利, 等. 基于Synchro系统的信号交叉口仿真及改善[J]. 洛阳理工学院学报: 自然科学版, 2015, 25(02): 13-16+26.
[9] 徐辉, 邢桂先, 吴中. 基于Synchro的交叉口渠化、相位及配时协调优化[J]. 公路交通技术, 2015(03): 107-112+123.
[10] 顾佳磊, 韩印, 姚佼. 基于Synchro与VISSIM混合仿真的单点交叉口信号配时优化方法研究[J]. 森林工程, 2014, 30(04): 94-97.
[11] 卢火平, 罗典, 许伟立. 基于Synchro-VISSIM的干道绿波协调控制仿真研究[J]. 交通与运输: 学术版, 2013(02): 33-36.
[12] 郭建钢, 林文燔, 陈必太, 等. 基于Synchro的厦门市白鹭洲路信号协调控制的优化设计[J]. 华东交通大学学报, 2013(03): 50-54.
[13] 邵娟, 程琳. 基于Synchro系统的干线绿波控制优化技术[J]. 公路交通科技, 2013.
[14] 李鑫, 许群英, 张国强, 等. 图解法在干道信号绿波协调控制中的应用——以嘉兴市昌盛路为例[J]. 交通世界, 2018(25): 16-17+23.
[15] GUO Lin, YANG Renfa, ZHANG Minjie. Arterial traffic two-direction green wave coordination control based on matlab graphical method[J]. 2015 2nd international Conference on Information Science and Control Engineering, 2015.
[16] 陈昕, 张驰. 基于绿波带中心线交点的双向绿波控制图解法[J]. 辽宁工业大学学报: 自然科学版, 2017, 37(02): 137-140.
[17] 郭敏, 杜怡曼, 吴建平. 微观交通仿真基础理论研究及应用实例[M]. 北京: 人民交通出版社, 2012.
[18] 于泉. 城市交通信号控制基础[M]. 北京: 冶金工业出版社, 2011: 52-53.
[19] 罗霞, 刘澜. 交通管理与控制[M]. 北京: 人民交通出版社, 2008.
The Optimization Design of Signal Coordinated Control for Lvxin Road in Leshan City
XU Tao-rang,ZHAO Bin,JIANG Yang-sheng
(School of Transportation and Logistics, Southwest Jiaotong University, Chengdu 611756, China)
In regard to the issue of low traffic efficiency in the Lvxin Road segment in Leshan City, the graphic and synchro method combined with channelizing measures were applied to design the signal coordinated control plan. Besides, VISSIM was used to simulate and evaluate the performances of original timing plan and two coordinated timing plans. The results show that parameters, such as travel delay stops in two coordinated control plans are both smaller than in the original. It was further found that the timing plan based on the synchro method can make parameters like travel delay smaller in the whole system while the plan based on the graphic method can ensure that more cars pass on the arterial simultaneously; This indicates that the two coordinated control plans have their individual advantages, thus providing different choices for different control demands.
traffic engineering; arterial signal coordinated control; synchro; graphic method; Lvxin Road in Leshan City; VISSIM simulation
U491.4
A
10.3969/j.issn.1672-4747.2020.01.003
1672-4747(2020)01-0016-10
2019-03-04
2019年研究生学术素养提升计划专题项目(2019KCJS46)
徐桃让(1995—),男,甘肃陇南人,汉族,西南交通大学硕士研究生,研究方向为交通工程,E-mail:1922417433@qq.com
徐桃让,赵斌,蒋阳升. 乐山市绿心路信号线控方案优化设计[J]. 交通运输工程与信息学报,2020,18(1):16-25.
(责任编辑:刘娉婷)
