速率稳定滚仰式导引头跟踪回路自抗扰控制器设计与仿真
2020-03-05王远飞刘晓利陈志华
王远飞 刘晓利 陈志华


摘 要:构建了一种速率稳定滚仰式导引头的双通道数学模型。对稳定回路采用速率陀螺反馈控制;对位置跟踪回路分别采用PID控制与自抗扰控制理论设计了控制器。通过仿真计算研究了控制器的动态性能、跟踪精度以及对外界干扰的鲁棒性。仿真结果表明:滚转通道对方波输入具有超调,而俯仰通道没有超调;自抗扰控制相比PI控制具有无超调、更快的上升时间和抗外界干扰能力;自抗扰控制器隔离度大约为PI控制器的1/30。研究结果为常规小口径火箭弹的制导化改造提供了一种可用的技术方案。
关键词:滚仰式导引头;跟踪回路;速率稳定平台;自抗扰控制
中图分类号:TJ765.3+31 文献标识码:A 文章编号:1673-5048(2020)01-0064-07
0 引言
自2000年AIM-9X滚仰式导引头出现并进入实用以来[1],其体积小、质量轻、能够实现滚转360°、俯仰±90°的大视场等优点受到青睐和广泛关注。多年来,对其结构与跟踪原理[2]、过顶问题与奇异性的探讨[3-4]、控制指令解算[5]、视线角速率提取[6-8]以及传统与先进控制方法[9-13]等方面的研究都取得了长足的进步和丰富的技术成果,对于常规小口径单兵火箭弹的制导化改造也具有十分诱人的应用前景。然而,一般来说单兵火箭弹口径小于100 mm,且弹体会以不确定的角速度转动;更重要的是由于成本上的限制,弹上不配置姿态测量模块,无法提供捷联方案所需要的角速度反馈信号。因此捷联式(或半捷联式)滚仰式导引头的方案难以应用。
本文在滚仰式(或滚摆式)导引头结构方案的基础上,给平台框架增加两个MEMS速率陀螺,构建速率稳定滚仰式导引头稳定平台,使其能为常规火箭弹应用提供可用技术。在速率稳定平台的基础上,采用传统PID控制和自抗扰控制分别设计位置跟踪回路控制器,验证两种方法跟踪回路的性能,并比较其对不确定性外界干扰的鲁棒性。为了体现本设计平台的可再现性,采用文献[14]捷联式稳定平台的系统参数,给出两种控制器的设计参数。
1 速率稳定滚仰式导引头数学模型
速率稳定滚仰式导引头的模型以文献[14]的結构与参数为基础,给平台安装两个MEMS速率陀螺,原理框图如图1所示。速率陀螺可以测得平台的惯性角速率,用于速率回路的稳定。对于位置跟踪回路可以采用PID控制与自抗扰控制理论设计控制器。
1.1 坐标系
本文数学模型用到三套坐标系,分别是弹体坐标系Ob-xbybzb、外框坐标系Oo-xoyozo和内框坐标系Op-xpypzp。其中,弹体坐标系绕xb轴转ζ角得到外框坐标系,变换矩阵为Tob,外框坐标系绕zo轴转η角得到内框坐标系,变换矩阵为Tpo,表达式分别为
坐标变换矩阵是正交矩阵,其逆矩阵为转置矩阵,即T-1ob=TTob,T-1po=TTpo。各坐标系的关系如图2所示。
1.2 运动学描述
由方程组(6)可知,因弹体角速度扰动产生交叉耦合力矩不能通过机械措施减少或消除,因此将含有p,q,r的多项式看作弹体耦合干扰处理。
1.4 电机模型
内、外框电机模型主要由框架电机输入、框架各种干扰力矩和弹体运动耦合力矩三部分构成。电机电流环和力矩环系统如图3所示。
稳定平台电机参数值如表1所示,功率放大倍数取10。
2 自抗扰控制器设计
2.1 自抗扰控制的基本原理
自抗扰控制理论由韩京清[15]提出,自抗扰控制器(Active Disturbance Rejection Controller,ADRC)由跟踪微分器、扩张状态观测器和非线性反馈控制三部分组成。自抗扰控制技术是一种实时估计并补偿不确定因素和干扰的控制技术,在军民各领域均取得了丰富的应用成果[16]。图4为二阶ADRC的结构图。
跟踪微分器能够从被噪声污染的信号中合理提取微分信号。扩张状态观测器是ADRC的核心部分,其实时观测被控对象所受到的扰动,将估计的总扰动量补偿到控制器中,使非线性系统转变为线性积分串联系统。非线性反馈控制将跟踪微分器和扩张状态观测器的输出信号进行非线性组合,得到被控对象所需要的控制指令。自抗扰控制的非线性特性,可使系统无超调地快速跟踪控制指令,获得优异的控制效果。
2.2 基于自抗扰控制的控制器设计
本文主要考察导引头双通道输出信号能否准确、及时地对给定的导引信号进行正确跟踪,以及对外部干扰是否具有好的鲁棒性。控制对象为俯仰、滚转通道的框架转角ζ,η,ADRC的算法为
3 仿真分析
采用MATLAB/Simulink对滚仰稳定平台进行双通道联合仿真,验证PI控制器和ADRC的控制性能及抗干扰能力。
3.1 仿真结果
仿真输入信号为方波,框架转角幅值1 rad,周期2 s,占空比50%,采样周期为1 ms。
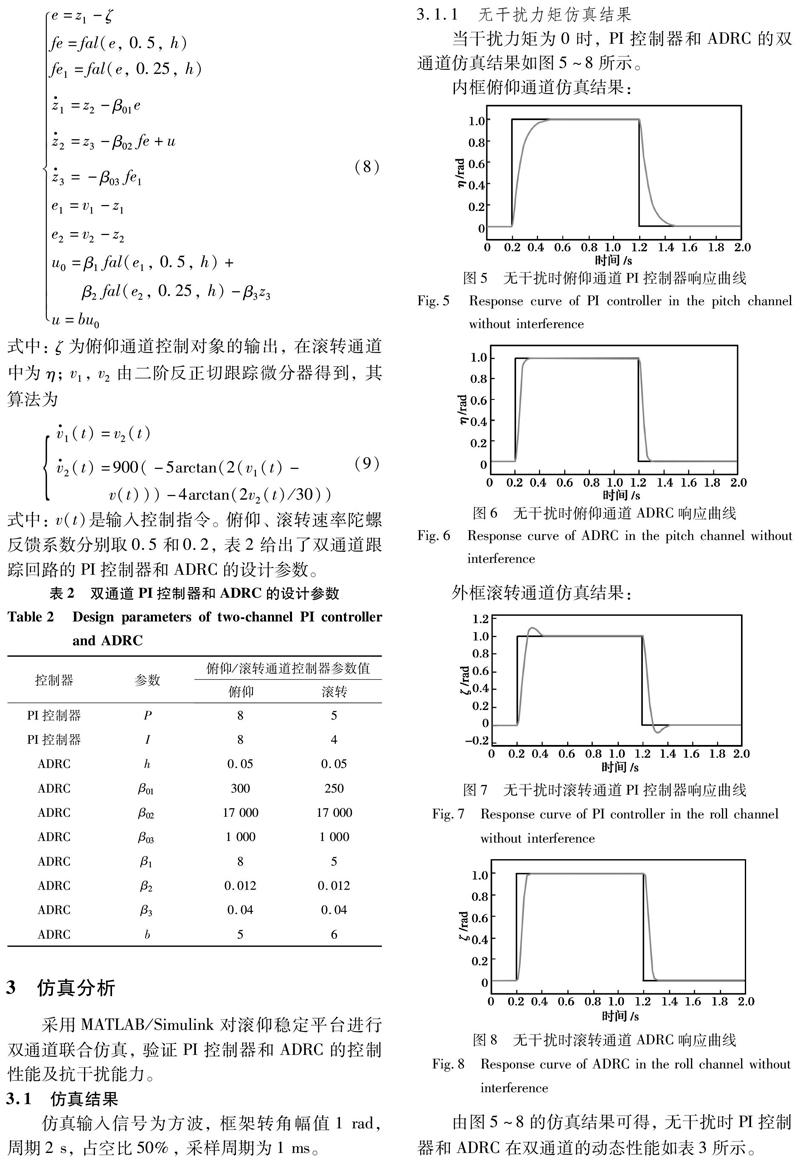
3.1.1 无干扰力矩仿真结果
当干扰力矩为0时,PI控制器和ADRC的双通道仿真结果如图5~8所示。
内框俯仰通道仿真结果:
外框滚转通道仿真结果:
由图5~8的仿真结果可得,无干扰时PI控制器和ADRC在双通道的动态性能如表3所示。
3.1.2 存在弹体耦合干扰仿真结果
当弹体角速度ωb=(p,q,r)T取幅值为5 rad/s、频率为6 Hz的正弦信号时,PI控制器和ADRC在外框滚转通道的仿真结果如图9~10所示。
由图9~10的仿真结果可见,PI控制器受到弹体运动的干扰效果,产生较为明显的波动,ADRC基本不受弹体运动的影响,相较PI控制器具有更好的鲁棒性。
3.1.3 存在测量噪声仿真结果
當对方波输入信号附加噪声功率为0.000 001、采样周期为1 ms的白噪声时,ADRC在俯仰通道的仿真结果如图11所示。
由图11的仿真结果可见,ADRC基本不受输入信号所附加白噪声的影响,响应曲线仅有轻微的颤动,能够满足控制要求。
3.2 弹体耦合干扰分析
由3.1节中的仿真结果可见,弹体耦合干扰对俯仰、滚转两个通道的影响效果明显不同。为了观察弹体运动对两个通道的具体影响,给弹体角速度ωb=(p,q,r)T施加幅值1 rad/s、频率为5 Hz的正弦信号进行仿真,仿真结果如图12所示。
由图12仿真结果可见,弹体耦合干扰在滚转通道的响应比俯仰通道的大一个数量级。
3.3 导引头隔离度
隔离度为弹体运动引起的平台转动角速度与弹体转动角速度的比值,是导引头的重要性能指标,表征导引头稳定平台对弹体运动的隔离性能,直接关系到导弹的制导精度[17]。
对弹体角速度ωb=(p,q,r)T分别取相同幅值1 rad/s、不同频率的正弦信号进行仿真,PI控制器和ADRC的隔离度仿真结果见表4。
由表4结果可明显看出,在弹体分别以不同频率转动信号输入时,ADRC稳定平台的隔离度大约为PI控制器的1/30。
4 结论
本文提出了速率稳定滚仰式导引头的设计方案,构建了导引头稳定平台的数学模型,为其位置回路设计了ADRC并给出了稳定平台系统参数与控制器参数。将ADRC与PI控制器进行仿真对比分析,得到如下结论:
(1)滚仰式导引头采用自抗扰控制器相较PI控制器,具有更快的响应速度且无超调,能够有效抑制弹体运动引起的耦合扰动,且不受测量噪声的影响,具有更好的鲁棒性,可同时满足系统稳定、快速的要求。
(2)对弹体运动产生的耦合干扰分析表明,在滚转、俯仰两个通道引起的干扰量有较大差别,在滚转通道的响应比俯仰通道的大一个数量级。
(3)通过滚转通道的仿真表明,ADRC能有效降低弹体运动引起的扰动,隔离度大约为PI控制器的1/30。
参考文献:
[1] 穆学桢,周树平,赵桂瑾. AIM-9X空空导弹位标器新技术分析和评价[J]. 红外与激光工程,2006,35(4):392-394.
Mu Xuezhen,Zhou Shuping,Zhao Guijin. Analysis and Evaluation of New Approach of AIM-9X AAM Seeker [J]. Infrared and Laser Engineering,2006,35(4):392-394. (in Chinese)
[2] 王志伟,祁载康,王江. 滚-仰式导引头跟踪原理[J]. 红外与激光工程,2008,37(2):274-277.
Wang Zhiwei,Qi Zaikang,Wang Jiang. Tracking Principle for Roll-Pitch Seeker[J]. Infrared and Laser Engineering,2008,37(2):274-277. (in Chinese)
[3] 林德福,王志伟,王江. 滚-仰式导引头奇异性分析与控制[J]. 北京理工大学学报,2010,30(11):1265-1269.
Lin Defu,Wang Zhiwei,Wang Jiang. Singularity Analysis of Roll-Pitch Seeker and Its Control Strategy [J]. Tran-sactions of Beijing Institute of Technology,2010,30(11):1265-1269. (in Chinese)
[4] 孟伟,朱学平,邱峰,等. 滚仰式导引头过顶问题的抗饱和控制研究[J]. 科学技术与工程,2013,13(25):7505-7509.
Meng Wei,Zhu Xueping,Qiu Feng,et al. Study of Saturated Control Based on Track for Roll/Pitch Seeker [J]. Science Technology and Engineering,2013,13(25):7505-7509. (in Chinese)
[5] 刘凯,梁晓庚,李友年. 基于旋量理论的滚仰式导引头跟踪指令解算[J]. 四川兵工学报,2014,35(2):37-39.
Liu Kai,Liang Xiaogeng,Li Younian. Solution of Tracking Command for Roll-Pitch Seeker Based on Paden-Kahan Sub-Problem[J]. Journal of Sichuan Ordnance,2014,35(2):37-39. (in Chinese)
[6] 花文涛,刘凯,丁海山. 滚仰式红外导引头视线角速率提取方法研究[J]. 红外技术,2015,37(1):63-66.
Hua Wentao,Liu Kai,Ding Haishan. Research on Roll-Pitch Infrared Seeker LOS Rate Extraction [J]. Infrared Technology,2015,37(1):63-66. (in Chinese)
[7] 江云,李友年,王霞. 滚仰式捷联导引头视线角速度提取技術研究[J]. 电光与控制,2015,22(4):66-69.
Jiang Yun,Li Younian,Wang Xia. Line-of-Sight Angle Rate Extraction for Roll-Pitch Strap-Down Seeker[J]. Electronics Optics & Control,2015,22(4):66-69. (in Chinese)
[8] 韩宇萌,贾晓洪,赵桂瑾,等. 基于跟踪微分器的滚仰式成像导引头视线角速率估计[J]. 红外技术,2015,37(7):598-601.
Han Yumeng,Jia Xiaohong,Zhao Guijin,et al. Line-of-Sight Rate Estimation Based on the Tracking Differentiator for Roll-Pitch Imaging Seeker [J]. Infrared Technology,2015,37(7):598-601. (in Chinese)
[9] 韩宇萌,贾晓洪,王炜强,等. 基于BP神经网络的捷联导引头控制系统设计[J]. 测控技术,2016,35(10):70-74.
Han Yumeng,Jia Xiaohong,Wang Weiqiang,et al. Control System Design Based on BP Neural Network for Strap-Down Seeker[J]. Measurement & Control Technology,2016,35(10):70-74. (in Chinese)
[10] 贾晓洪,韩宇萌,王炜强. 基于RBF神经网络的滚仰式导引头控制系统设计[J]. 兵器装备工程学报,2016,37(8):1-5.
Jia Xiaohong,Han Yumeng,Wang Weiqiang. Control System Design Based on RBF Neural Network for Roll-Pitch Seeker[J]. Journal of Ordnance Equipment Engineering,2016,37(8):1-5. (in Chinese)
[11] 韩宇萌,冯茜,贾晓洪,等. 空空导弹滚仰式捷联红外导引头控制设计[J]. 计算机仿真,2016,33(10):86-90.
Han Yumeng,Feng Qian,Jia Xiaohong,et al. Control for Roll-Pitch Strap-Down Infrared Seeker of Air-to-Air Missile[J]. Computer Simulation,2016,33(10):86-90. (in Chinese)
[12] 张良,韩宇萌. 滚仰式半捷联稳定平台的神经网络自适应控制算法[J]. 测控技术,2018,37(6):5-8.
Zhang Liang,Han Yumeng. A Neural Network Adaptive Control Algorithm for Roll-Pitch Semi-Strapdown Stabilized Platform[J]. Measurement & Control Technology,2018,37(6):5-8. (in Chinese)
[13] 陈开伟,温求遒,夏群利. 半捷联导引头混合自抗扰控制系统设计[J]. 红外与激光工程,2018,47(11):416-422.
Chen Kaiwei,Wen Qiuqiu,Xia Qunli. Hybrid ADRC System Design for Semi-Strapdown Seeker [J]. Infrared and Laser Engineering,2018,47(11):416-422. (in Chinese)
[14] 董小萌,张平,付奎生. 极坐标捷联式视觉导引平台的机电建模与仿真[J]. 系统仿真学报,2009,21(1):262-265.
Dong Xiaomeng,Zhang Ping,Fu Kuisheng. Electromechanical Modeling and Simulation for Strapdown Polar Coordinate Visual Guidance Platform[J]. Journal of System Simulation,2009,21(1):262-265. (in Chinese)
[15] 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社,2008.
Han Jingqing. Active Disturbance Rejection Control Technique:The Technique for Estimating and Compensating the Uncertainties [M]. Beijing:National Defense Industry Press,2008. (in Chinese)
[16] 王文文,刘晓利,王慧,等. 小灵巧导弹自抗扰BTT控制器设计与仿真[J]. 战术导弹技术,2015(4):86-91.
Wang Wenwen,Liu Xiaoli,Wang Hui,et al. Design and Simulation of ADRC BTT Controller for Small Smart Missile[J]. Tactical Missile Technology,2015(4):86-91. (in Chinese)
[17] 何垒,夏群利,杜肖. 平台导引头隔离度特性研究[J]. 航空兵器,2018(5):41-46.
He Lei,Xia Qunli,Du Xiao. Analysis on the Characte-ristics of Seeker Disturbance Rejection Rate[J]. Aero Weaponry,2018(5):41-46. (in Chinese)
