激光供能无人机的一种优化跟踪算法
2020-03-05袁建华洪沪生
袁建华,黄 开,洪沪生,陈 庆,李 尚
(三峡大学 电气与新能源学院,湖北 宜昌 443002)
引言
自20 世纪90 年代以来,得益于军事需求的推动、先进技术的支持,新材料的使用,各种无人机发展迅猛。而小型电动无人机也以其自身突出的优点,在现代战争和科学研究中发挥的作用日趋明显,得到了广泛的应用[1-2]。但是电动无人机自身携带的有限能量难以保证其长时间的任务飞行,严重影响了其相应功能的发挥。激光无线能量传输技术的提出和应用,极大地提高了无人机的续航能力。该技术的能量传输载体为激光束,通过光伏接收器接收激光能量来进行光电转换,从而实现了能量远距离无线传输[3]。与传统供电方式的无人机相比,激光无线能量传输技术使得无人机的续航时间提高了24 倍[4]。
目前,国内外针对无人机激光无线能量供能技术的相关研究相对较少。2013 年,美国利用无线激光充电系统成功为一架四旋翼无人机进行了无线供能的试验。2016 年,俄罗斯能源火箭航天公司利用激光无线传能系统为1.5 km 外的移动电话充电1 h。2018 年,美国国防部计划研发采用激光无线充电技术驱动模拟自然的蝙蝠自主飞行无人机[5-7]。文献[8]中Bogushevskaya V A 等人研究了不同的电路连接方式,提出了通过优化无人机上的光伏接收器的电路连接方式可以提高无人机激光接收效率的方法。文献[9]中Daniel E Becker等人对比论述了无人机上平板型、会聚型和光伏眼3 种光伏接收器的转换效率和各自的优缺点,得出了采用不同光伏接收器可以在相应条件下提高无人机上激光转化效率这一结论。文献[10]中Douglas P 基于CCD 传感器检测到的能量分布灰度图像对激光能量分布和光束收敛度进行优化,最终达到提高传输效率的目的。文献[11]中论述了激光无线能量传输系统的关键技术,搭建了系统模型,并对系统进行了仿真以及实验验证,获得了理想的光电转换效率。文献[12]中提出并设计了一套基于无人机的跟踪、捕获、瞄准的激光无线能量供给系统,并进行了理论分析和实验验证。文献[13]中提出了一种中小型电动无人机的激光射束驱动系统,详细介绍了系统的组成部分,搭建了系统的理论框架。以上文献均是对无人机的激光无线供能系统的理论推导以及光伏接收器的相关优化研究,对于无人机机载激光供能时的充电效率问题和稳定性研究则十分少见。因此,有必要针对相关技术开展进一步的研究。
本文基于光伏电池的基本特性,对无人机激光充电的能量最优控制问题进行了分析研究。当地面激光器发出的激光光束已经投射在无人机上的光伏电池板后,此时无人机在飞行状态下充电,为了保证充电效率最大化,提出了应用于无人机上激光无线供能技术的一种充电最优跟踪算法。
1 系统组成及工作原理
1.1 无人机激光无线能量远程传输系统
如图1 所示,无人机激光无线能量传输系统主要由地面激光能量发射机和激光能量接收机组成[14]。主要包括:电源、激光器、跟瞄系统、光电转换系统、充电电池等。在激光发射端,一般使用的是半导体激光发射器[15-16],激光器将激光发射出去。而在激光接收端,光电转换系统将激光光束的能量转化成电能,为电池充电,给电动无人机提供能量。

图1 无人机激光无线能量远程传输结构图Fig.1 Structure diagram for remote transmission of UAV laser wireless energy
由于无人机在执行任务时飞行环境条件复杂,在激光无线供能的过程中,光伏电池板接收到的激光光照强度并不均匀,为了保证光电转化最优化,使得光伏组件工作在最大功率点,须采用一种最优化跟踪方法,使得无人机在充电过程中保持较大的功率输出,提高充电效率并保证充电稳定性,确保无人机的工作能效。
1.2 光伏阵列输出特性
光伏电池是将太阳能转换成电能的器件,其输出特性受到温度和光照强度的影响[14]。一系列光伏电池通过串并联就可以组成一个光伏阵列,其等效电路如图2 所示。
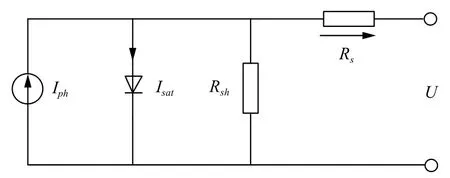
图2 光伏阵列单元等效电路Fig.2 Equivalent circuit of PV array unit
由此可以得出,忽略并联电阻Rsh时,光伏阵列的简化数学模型为[17]

式中:I、U分别为光伏阵列输出电流和电压;Iph为 光伏电池光生电流,受光照强度影响;Isat为光伏电池反向饱和电流,受温度影响;q为电荷常数;A为光伏电池PN 结系数;K为一常数;T为绝对温度;Rs为光伏阵列串联等效电阻;np、ns分别是光伏电池并联和串联数目。
由图3 和图4 可知,当温度和光照强度发生变化时,太阳能光伏阵列是一个典型的非线性电源,在光伏电池工作过程中,光照强度和环境温度是光伏阵列输出功率的两个重要影响因子。在不同的工作条件下,光伏电池有不同的输出电压,当输出电压逐渐增大时,输出功率有一个先升后降的过程,在此过程中图像上有一个最高的峰值点,此时光伏阵列的输出功率最大。

图3 温度一定时不同光照强度下的P-V 特性曲线Fig.3 P-V characteristic curve under different light intensities at a certain temperature

图4 光照一定时不同温度条件下的P-V 特性曲线Fig.4 P-V characteristic curve under different temperature conditions with a certain light intensity
光伏阵列所能吸收到的太阳辐照量与光照入射角有关。所以,一方面要使阳光能够大范围的垂直照射在光伏板上,另一方面则需要采用最大功率点跟踪算法,使得输出功率最大。这样就可以保证光电转换的高效性。
2 CV 法与FA 法结合的MPPT 控制算法
最大功率点跟踪(MPPT)可以使光伏阵列克服外在环境因素,输出功率稳定在最大功率点处,在有限的条件下最大化地利用光伏电池,从而发出更多的电量[18]。恒定电压法(CV 法)利用系统中DC/DC 转换器的占空比变化,使系统的输出电压值稳定在最大功率点电压附近,从而实现MPPT 控制。CV 法虽然跟踪速度快,但其对复杂环境适应性差,以及跟踪精度不高,实际应用中常受到限制。本文将CV 法和萤火虫算法(FA 法)相结合,当外界环境条件发生变化时,利用CV 法快速跟踪的优点,而后再用FA 算法弥补其精度不够的缺点,来保证系统快速稳定地输出最大功率。
2.1 萤火虫算法(FA 法)介绍
萤火虫算法(FA 法)是一种新型的进化算法,主要包含亮度和吸引度两个因素。萤火虫位置的变化和移动方向由亮度决定;萤火虫的位移距离由吸引度控制。亮度和吸引度在系统优化过程中不断改变,最终实现目标优化[19-20]。
定义1 萤火虫相对荧光亮度:

式中:I0为萤火虫的最大荧光亮度,与目标函数值的优劣成正比; γ为光强吸收系数,是一个常数;rpq为萤火虫p和q之间的空间距离。在一维空间中,位于Xp和Xq的两只萤火虫p和q之间的距离为

定义2 萤火虫的吸引度:

式中: β0为光源处(r=0)的吸引度,即最大吸引度;γ为光强吸收系数,是一个常数,介于0~10 之间;rpq为萤火虫p和q之间的空间距离。
定义3 萤火虫q吸引萤火虫p向其移动,其更新后的位置由(5)式给出:

2.2 CV 法与FA 法结合的MPPT 控制方案
本文是在激光已经投射到无人机光伏电池板上之后,为了提高无人机在激光无线供能过程中的稳定性和充电效率,采用了一种新的MPPT 控制方案。由于无人机是在处于飞行状态的过程中进行激光无线供能,无人机离地面激光站距离越远时,大气对激光能量的衰减影响也越大。当无人机飞行速率控制在18 km/h 内,且飞行高度为300 m~500 m 时,此时激光能量在传输过程中的衰减会得到一个有效地控制,传输的能量也能够得到最大化的利用[21-22]。同时,对于实际的激光发射系统,激光光束的抖动也会影响其充电效率,此时地面激光站可以通过光束稳定系统,采用快速反射镜实时的校正各种扰动,使得激光光束的指向漂移和抖动控制在可接受的范围内[23]。在实际跟踪时,瞄准精度、光斑效应等因素也会对充电效率有所影响,但这些因素均可以通过相应的方法进行有效的控制,提高无人机在激光无线供能时激光的利用率[24]。
将FA 算法应用于MPPT 控制中,萤火虫的位置被认为是DC/DC 转换器的占空比D。萤火虫的亮度则被视为光伏系统的输出功率P。具体操作步骤如下。
1)初始化参数。设定萤火虫最初吸引度 β0,固定FA 算法的常数,即确定 γ、a的值以及种群大小N的数目。确定好终止准则。
2)萤火虫位置初始化。萤火虫被定位在Dmin到Dmax之间的允许解空间中,其中Dmin和Dmax代表DC/DC 变换器占空比的最小值和最大值。
3)亮度评估。在这个步骤,DC/DC 变换器按照每只萤火虫的位置(即占空比)顺序操作。每个占空比对应相应的光伏阵列输出功率P被视为各自萤火虫的亮度或光强。这个步骤也是重复所有萤火虫在种群中的位置。
4)萤火虫的位置更新。最大亮度的萤火虫保持位置不变,其余萤火虫基于(5)式改变它们的位置。
5)如果达到终止标准,则终止程序。否则转到步骤3)。一旦所有的萤火虫在整个进程中的位移达到设定的最小值,则终止优化算法。程序终止时,DC/DC 变换器对应最佳的占空比。
6)一旦外部条件发生变化,重新启动算法。
FA 算法流程图如图5 所示。
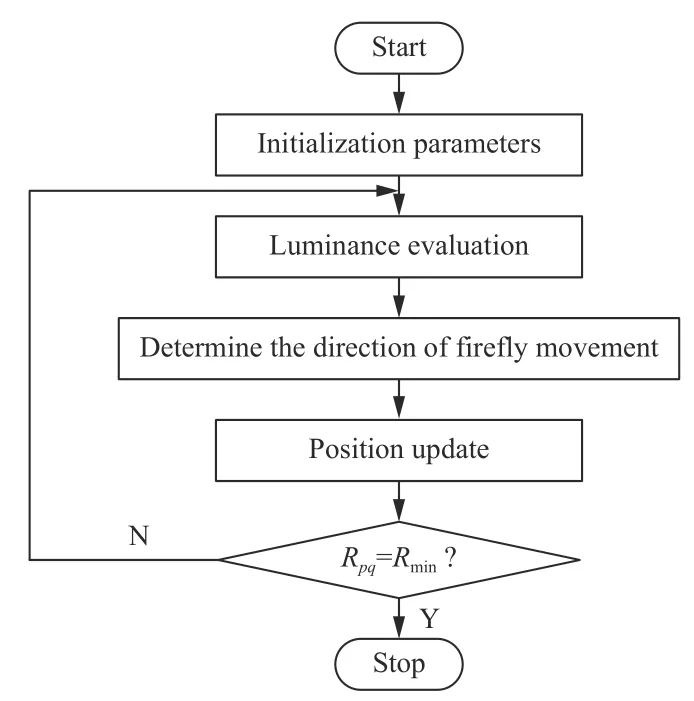
图5 FA 控制算法流程图Fig.5 Flow chart of FA control algorithm
文中采用CV 法和FA 算法联合控制的MPPT方案。具体算法流程图如图6 所示。

图6 CV 法和FA 法结合控制算法流程图Fig.6 Flow chart of control algorithm combined with CV method and FA method
其中,ΔD指的是占空比的步长增量,Um为最大功率点电压,ΔU为电压变化量,Uk为系统在k时刻的输出电压,Ik为输出电流,Uref为系统设定的参考电压。系统根据光伏阵列输出电压值来判断系统的工作状态,从而执行相应的算法。当系统的输出电压不在CV 法设定的电压±ΔU之内,此时CV 法启动。当系统的输出电压在CV 法设定的电压±ΔU之内,则采用FA 控制算法进行调控。经过一系列的优化,直到 ΔP近似等于零,此时系统的输出功率最大。
3 仿真验证
3.1 仿真结果分析
为了验证本文所提方法的有效性,在已有研究的基础上搭建光伏阵列最大功率点跟踪的仿真实验模型[25-26]。使用了标准Boost 升压电路[27],如图7所示。仿真模型中,设定环境T=25 ℃,C=100 μF,L=0.1 mH,R=20 Ω,Boost 电路的开关频率取为50 kHz。

图7 基于boost 电路的MPPT 系统Fig.7 MPPT system based on boost circuit
1)温度一定时,不同光照下的仿真结果。
当温度T=25 ℃时,光照由S=1 000 W/m2变化到S=600 W/m2,再变化到S=800 W/m2时,图8 为恒定电压法结合萤火虫算法的仿真结果曲线。图9为相同条件下传统扰动观察法(P&O 法)的仿真结果曲线。对比两种方法跟踪后的结果。从结果中可以看出,当光照强度为S=1 000 W/m2时,在算法的跟踪速度和寻优精度方面,本文所提出的方法大约在0.12 s 就达到了140.2 W 的输出功率,而传统的扰动法则平均需要0.3 s 才能收敛到139.3 W。当光照强度在t=1.0 s 和t=2.0 s 时发生突变后,本文的新的跟踪方法也能在0.1 s 左右快速收敛到79.6 W,而传统方法则需要经过0.36 s 左右收敛到78.4 W。同时,当功率达到稳定输出情况时,新的跟踪方法比传统扰动法的输出功率更稳定,仿真结果的图像波动性更小,系统震荡不明显。
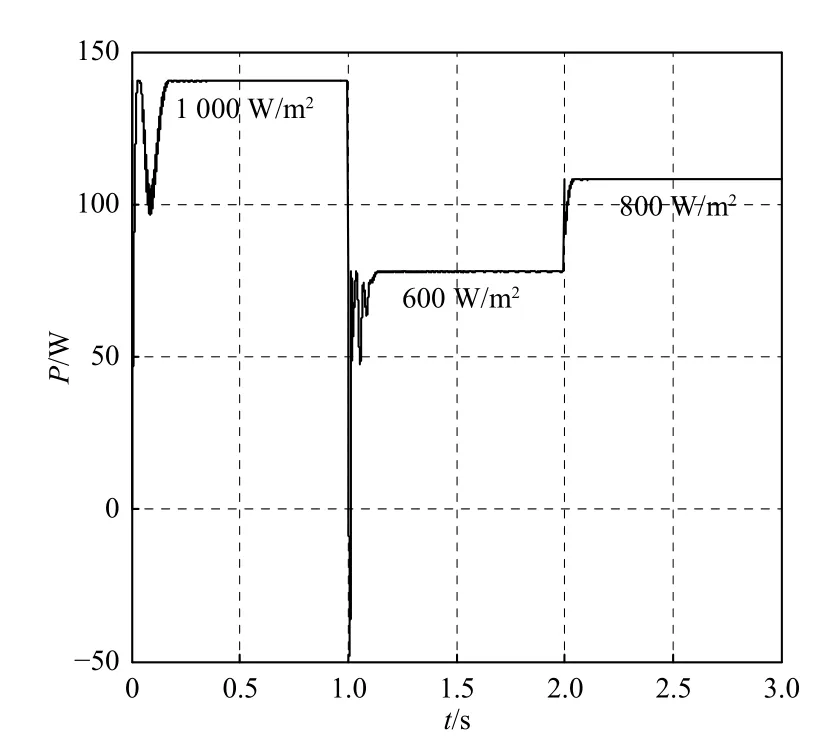
图8 采用CV 法与FA 法结合Fig.8 CV method combined with FA method
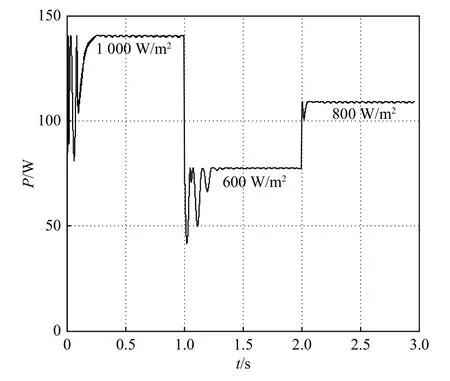
图9 采用传统P&O 法Fig.9 Traditional P&O method
2)光照一定时,不同温度下的仿真结果。
当光照强度为S=1 000 W/m2时,温度由T=50 ℃变化到T=25 ℃,再变化到T=15 ℃时,由图10 与图11 的结果对比可知,当T=50 ℃时,采用CV 法和FA 算法结合的MPPT 方案在0.15 s 左右功率就达到了139.8 W,而传统的扰动法需要0.32 s 左右收敛到138.4 W。当温度在t=1.0 s 和t=2.0 s 时发生突变时,本文提出的方法能够迅速反应,在0.1 s左右就能快速稳定地收敛,而尽管传统的扰动法也能在相应的时间上收敛,但是其系统震荡明显,输出功率在不停地波动,最优点的数值一直在改变。因此,此种条件下,本文提出的新的跟踪方法在减少功率震荡,快速稳定地输出最大功率中具有良好的效果。

图10 采用CV 法与FA 法结合Fig.10 CV method combined with FA method

图11 采用传统P&O 法Fig.11 Traditional P&O method
3.2 跟踪误差分析
将本文提出的新的跟踪方法得到的最大输出功率P′m和传统P&O 法输出的最大功率P′′m和理论计算出的最大功率Pm相比较,误差分析情况如表1、表2 所示,m为本文所提方法的误差率,n为P&O 法的误差率。从表1 和表2 的数据分析可知,本文提出的新的跟踪方法所得到的最大功率与理论计算得出的最大功率的误差值在0.5%~0.7%之间,而传统的P&O 法的功率误差值在1.1%~2.1%之间,后者的误差较大。可见,在误差允许的范围内,本文提出的CV 法与FA 法相结合的新的跟踪方法是可以准确跟踪到系统的最大功率点 的。

表1 两种跟踪方法在光照强度不同时的功率误差分析Table 1 Power error analysis of two tracing methods with different illumination intensities

表2 两种跟踪方法在环境温度不同时的功率误差分析Table 2 Power error analysis of two tracing methods at different environmental temperatures
4 结论
以激光供能无人机相关技术为背景,提出了应用于激光供能无人机上的一种新的优化跟踪方法。该方法结合了恒定电压法(CV 法)和萤火虫算法(FA 法),克服了恒定电压法难以适应复杂充电环境的缺点,弥补了现有技术跟踪速度慢、精度低的缺点。当光伏接收器的周围环境条件发生改变时,本跟踪方法可先利用恒定电压法快速调整占空比,使其到达最大功率点附近,然后采用萤火虫算法进行进一步精确寻优。仿真结果显示,该方法使无人机在进行激光供能充电行为时的充电速度和动态稳定性得到大幅度提高,方法准确性和实用性也得到了验证。
