两级串联型ISD悬挂构型设计与分析
2020-03-05陈轶杰
徐 龙,毛 明,陈轶杰,杜 甫
(中国北方车辆研究所, 北京 100072)
车辆行驶时的振动主要通过悬挂系统抑制[1]。传统悬挂系统结构单一,限制了悬挂系统的隔振性能。直到惯容器的概念被Smith等人提出[2],传统被动悬挂系统才得到了飞跃式的发展。近年来,车辆悬挂构型由于惯容器的引入变得多种多样,针对悬挂构型设计的研究也层出不穷。
2012年,陈龙等[3]利用电路网络中的级联滤波思想,根据机电相似关系设计了一种两级串联式ISD悬挂构型;2014年,杜甫[4]对包含一个惯容器的ISD悬挂构型进行拓扑结构设计,得出了一种通用构型;2017年,Sara Ying Zhang[5]提出了一种子构型串并联形成新构型的设计方法,构建了许多新悬挂构型。上述设计方法中,都设计了两级串联型ISD悬挂构型。而且通过试验分析,均验证了两级串联式构型具备优良的隔振性能。但是未曾发现有学者对所有两级串联型ISD悬挂进行系统研究,本文旨在提出两级串联型ISD悬挂通用网络,对比分析不同形式的两级串联型ISD悬挂的隔振性能。
文中提出了一种6元件两级串联式ISD悬挂隔振网络,利用叠加法结合电路中的拓扑设计方法(支路对应元件,结点对应节点[6]),构建了4种工程上可实现的两级串联式ISD悬挂构型,并利用机械阻抗原理构建频域内的通用阻抗动力学模型。同时,对第二级元件参数进行优化,由简到繁逐步对4种悬挂构型进行分析,对比4类悬挂的幅频特性,选出性能较优的两级串联式ISD悬挂构型。
1 ISD两级隔振拓扑网络建立
文献[5]中描述了一种复杂隔振网络的设计方法:首先通过分析法找到子构型,然后将子构型进行串并联分析,最终得到隔振网络通用构型。上述方法约束惯容数量≤阻尼数量≤弹簧数量,在对包含多个惯容器的隔振网络设计时,弹簧和阻尼数量过多,增加了元件数量,从而提高了隔振网络的复杂度。鉴于此,本文取消对元件数量的约束,将三元件并联ISD隔振构型作为子构型,对该子构型进行串并联叠加形成新构型。结合图论的支路结点图,绘制出隔振拓扑网络,并对应出隔振网络构型。同时,根据叠加分析法的原理,以及各元件的基本特点,给定如下设计约束:
1) 由于设计时以三元件并联ISD隔振构型作为基础构型,因此设计的网络中应至少包含一个完整子构型;
2) 根据弹簧、阻尼和惯容同类元件并联等效的特点,约束并联的支路数量不超过3;
3) 由于阻尼、惯容不能单独承受静载荷,因此串联型隔振构型的每一级必须存在弹簧元件用以承载;
根据上述约束条件得到表1 S2~S5所示的4种两级串联拓扑网络以及相对应的应用于车辆悬挂系统的隔振构型。
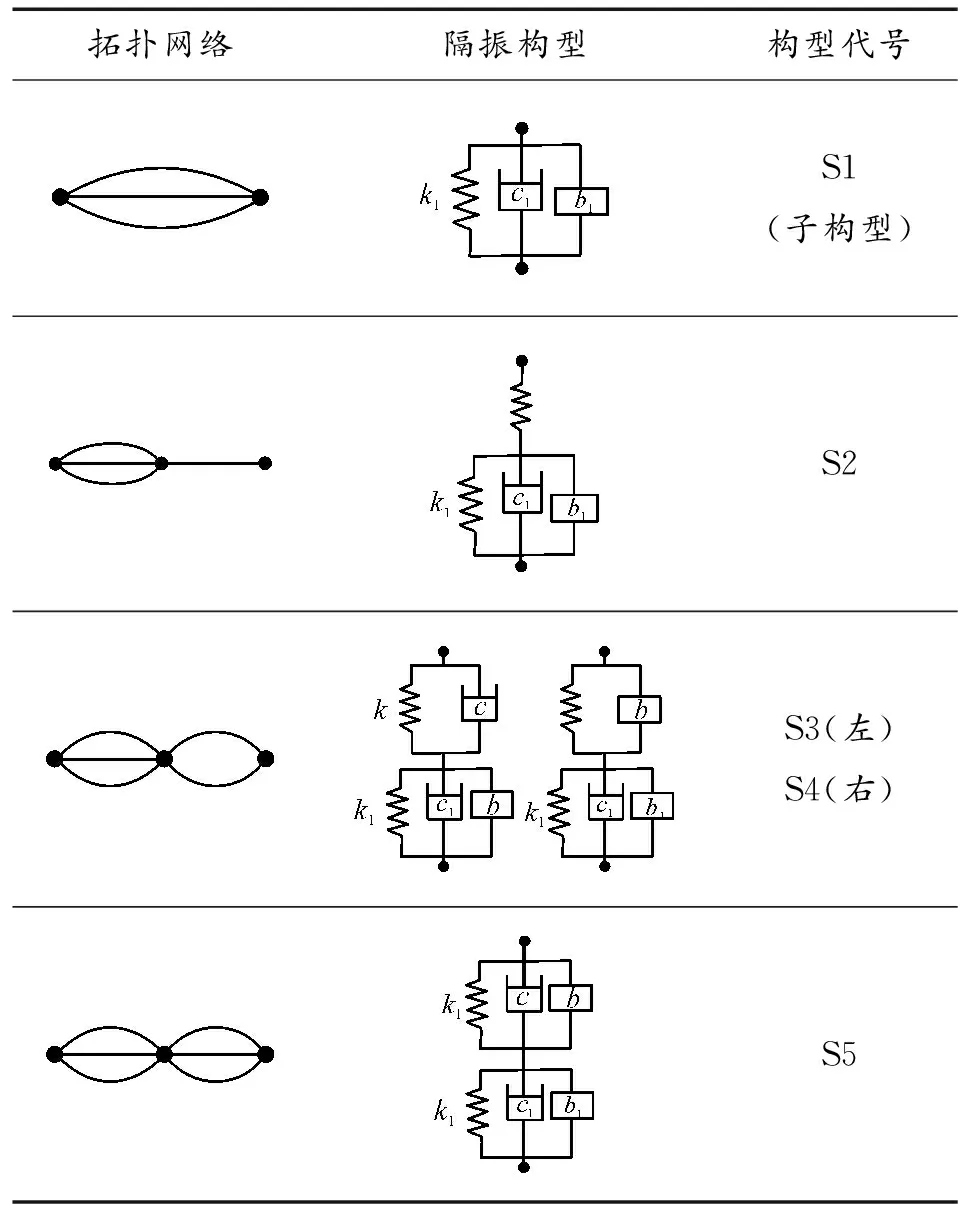
表1 子构型及其衍生两级ISD构型
由表1可以看出,S5在某个惯容或阻尼元件失效时等效于其他3种构型,因此可以作为表中构型S2~S5的通用模型,即两级串联式隔振网络通用构型。
2 机械阻抗
电路系统中,电容、电阻以及电感在构成电路时,可以通过电路网络的阻抗特性来描述其电学特性。在机械系统中,根据机电相似理论提出了机械阻抗及其倒数——机械导纳的概念,用以表达机械网络的力学特性[7]。
其中,机械阻抗定义为线性定常稳定系统的简谐激励与其引起的稳态响应的复数比或幅值之比。设系统的激励力为f(t),稳态响应为x(t),则系统的机械阻抗Z(s)和机械导纳H(s)分别为
(1)
(2)
式中:e为自然对数函数的底数;s为拉普拉斯变换的复变量,s=σ+jω;
将s=jω代入式(1)(2)中,得
(3)
(4)

从式(3)、式(4)可以看出,系统的机械阻抗是激励力f(t)与稳态响应为x(t)的傅里叶变换之比,机械导纳是其倒数。
悬挂系统是经典的机械隔振网络,根据新机电相似理论,新型悬挂系统可以包括弹簧、阻尼以及惯容三类元件。在悬挂系统中,其输出的响应量可以是位移、速度以及加速度,与之对应的机械阻抗也存在3种不同的形式:位移阻抗、速度阻抗以及加速度阻抗(见表2)。

表2 三类机械元件的机械阻抗
文献[8]中详细分析了各机械元件串联和并联时的阻抗特性,并得出了以下结论:
1) 对于任意个机械元件组成的串联系统,系统的速度阻抗的倒数等于各元件阻抗倒数的代数和,即:
(5)
2) 对于任意个机械元件组成的并联系统,系统的速度阻抗为各元件速度阻抗的代数和,即:
(6)
根据位移阻抗、速度阻抗和加速度阻抗之间的代换关系,可知以上结论推广到位移阻抗和加速度阻抗同样适用。
3 ISD悬挂动力学模型建立
以S5所示结构作为悬挂结构,并建立二自由度单轮悬挂动力学模型,如图1所示[9]。图中悬下质量和悬上质量分别用m1和m2表示,车轮刚度用kt表示,k、k1、c、c1、b、b1分别是悬挂刚度、阻尼和惯容器惯质系数,z1、z、z2分别为悬下质量m1、网络中间节点以及悬上质量m2在路面激励q作用下的垂直方向上的位移。由以上条件根据牛顿第二定律可以列出该车轮双质量系统的动力学方程:
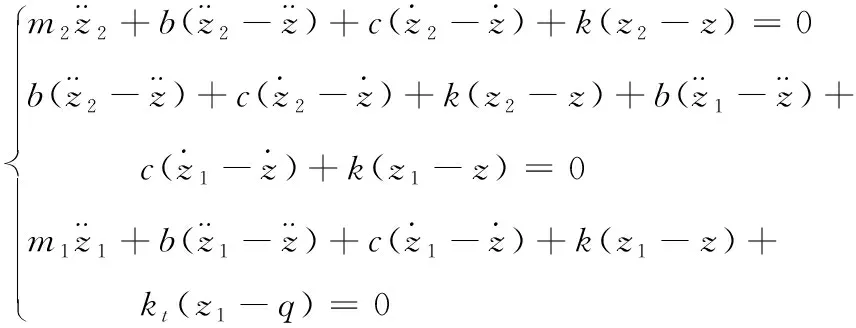
(7)
由于两级串联型悬挂两级中间存在浮动节点,式(7)多了一个中间式,增加了计算复杂度。由上述机械元件的串并联阻抗特性,可以将上述二自由度动力学模型简化为图2所示的二自由度阻抗动力学模型[10]。

图1 ISD悬挂双质量二自由度动力学模型 图2 ISD悬挂双质量二自由度阻抗动力学模型
图2中,Y(s)表示S5的机械阻抗:
(8)
根据式(8),图2所示模型的拉普拉斯变换动力学方程为:

(9)
整理式(9)得:

(10)
式中,s为复变量,由式求得z2/z1的传递函数G1(s):
(11)
将式(11)代入式(10)得z1/q的传递函数G2(s):
(12)
式(11)与式(12)相乘得z2/q的传递函数G3(s):
(13)
4 悬挂参数优化
4.1 悬挂性能评价指标
在单轮悬挂系统分析时,通常用悬上质量加速度(ACC)来表征乘员乘坐舒适性;利用车轮动载荷(DLT)表征车轮的行驶安全性和操纵稳定性;利用悬挂动行程(SWS)对车轮上下位移的行程进行约束限制。因此上述3个指标常用来评价悬挂系统的性能。
悬上质量加速度,即m2的垂直方向的加速度
(14)
车轮动载荷,即车轮与地面之间的动态载荷
DLT=kt(z1-q)
(15)
悬挂动行程,即车轮相对于车体在垂直方向上的位移
SWS=z2-z1
(16)
根据式(11)~式(13),可以求得ACC、DLT以及SWS在路面激励q下的幅频特性,根据幅频特性曲线可以分析出各元件参数对悬挂系统特性的影响,并对参数进行优化设计。

(17)
(18)
(19)
通常,ACC和DLT作为悬挂系统优化的目标函数,SWS作为约束条件,防止车轮动行程过大,频繁撞击限位块。将三元件并联系统的位移阻抗Y(s)代入到式(17)~(19)中,H1(s),H2(s)和H3(s)表示的就是三元件并联ISD悬挂系统3个评价指标的传递函数[11]。
4.2 目标函数与约束条件
ISD悬挂的参数优化是一个典型的多目标优化问题。对于其描述见式(20)[12]
(20)
其中:x为优化变量,fi(x)为目标函数,lb和ub分别对应优化变量的上下限,其余的等式和不等式分别为变量x的线性约束和非线性约束。
对于多目标优化问题,通常采用利用权系数将各个目标函数转化为单一目标进行参数优化,对于ISD悬挂系统的参数优化,目标函数如式(21)[13]。
(21)
由于车辆悬挂系统注重于乘员乘坐舒适性,故将ACC的加权系数取为0.6,将DLT的加权系数取为0.4。同时,又因为ACC与DLT的量纲不同,需要对其进行归一化,故将各个目标函数除以对应的S1构型的加速度均方根值ACC*和动载荷均方根值DLT*。
为了快速有效的得到最优解,需要对优化参数加以约束,约束条件如下:
1) 正实约束
悬挂参数只有在大于0时才具有工程意义,故优化参数x>0;
2) 偏频约束
悬挂系统偏频影响悬挂系统性能,故偏频需在一定范围内,即
(22)
式中,k*和b*为悬挂网络等效刚度和等效惯质系数。
悬挂动行程约束
悬挂工作时动行程不应超过约束值SWS*,即
SWSmax≤SWS*
(23)
5 两级串联型ISD悬挂系统性能分析
为了研究第二级不同构型对串联型ISD悬挂性能的影响,以具体车型参数(表3)对上述5种构型进行性能分析,以三元件并联ISD悬挂参数作为基础(即第一级元件参数不变),逐个分析添加元件后对悬挂系统性能的影响。并与三元件并联ISD悬挂结构分别从ACC、DLT和SWS等方面进行幅频特性对比,分析各两级串联型ISD悬挂的系统性能。
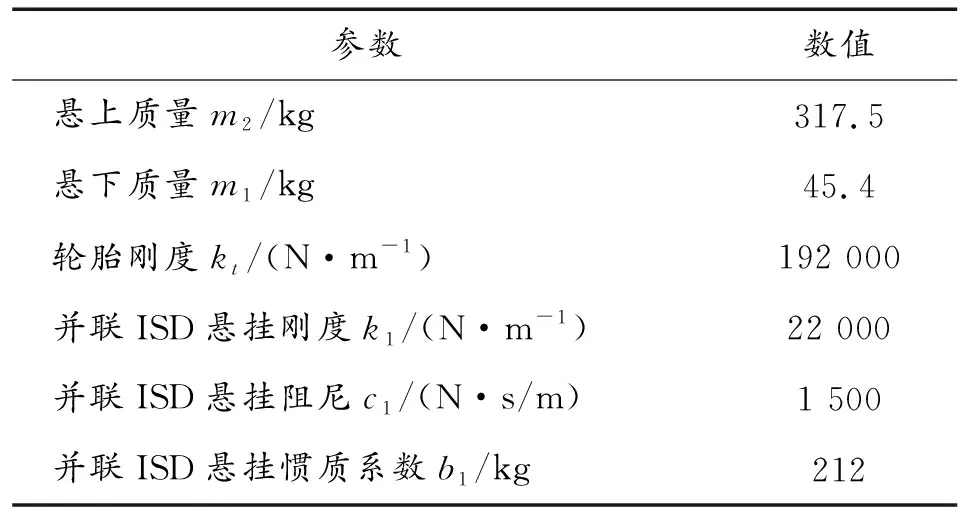
表3 三元件并联ISD悬挂性能参数
5.1 路面随机输入
(24)
基于式(17)~式(19)中求得的传递函数可以求出其对应的功率谱密度函数:
(25)
由于ACC、DLT和SWS在随机振动响应下幅值取正、负值的概率相等,其均值为0。因此,上述量的方差等于其均方值,根据式(26)求得均方根值[15]:
(26)
5.2 各悬挂振动响应
设车速v1=10 m/s,参考空间频率n0=0.1 m-1,路面不平度系数Gq(n0)=1 024×10-6m3。在上述输入条件下对4种串联型构型进行优化仿真,优化参数如表4所示。幅频特性如图3~图6所示。
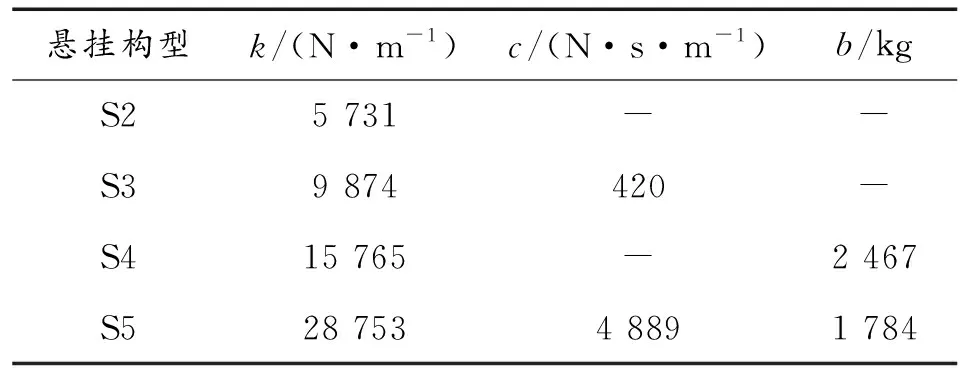
表4 各串联型ISD悬挂构型参数
由图3可以看出,传统三元件并联ISD悬挂与弹簧k串联形成的串联型构型S2在低频和高频幅值都有较严重的恶化情况,虽然在中频段有较好的的稳态响应,但是高低频激励会使悬上质量产生剧烈共振,因此S2不适合作为车辆悬挂结构。
图4中的S3是传统三元件并联ISD悬挂与SD悬挂串联的构型,即传统的两级串联型ISD悬挂。该悬挂构型在低频段和高频段均表现出了较为优良的隔振性能,尤其是对高频段的悬上质量加速度的抑制效果相对于构型S1有了明显的改善。由于构型S3减振效果明显,故适合作为车辆悬挂结构。
图5所示的S4是S1与惯容-弹簧谐振网络串联行程的两级串联ISD构型。由于引入并联谐振网络,使得该悬挂构型在低频段出现了反共振现象,但是由于伴随着反共振峰同时出现的共振峰幅值过大,严重影响了悬挂系统低频段的稳态响应,因此该构型不适合作为车辆悬挂结构。
S5是两个S1串联构成的两级串联ISD构型。从图6中可以看出构型S5与S1的功率谱密度函数曲线基本重合,构型S5在低频段相对于S1在低频段表现出了比较好的响应特性,其余频率段两种构型特性相似。但是由于S5构型复杂,现阶段不适合用于车辆悬挂上,若惯容悬挂集成化技术有较大突破,可以考虑将S5应用于车辆悬挂上。

图3 S2与S1时的功率谱密度
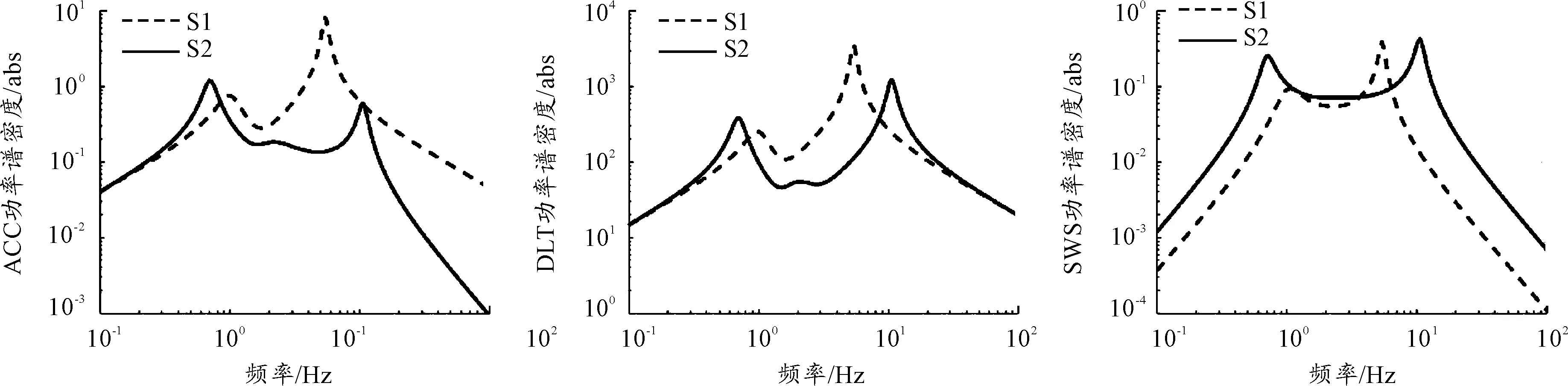
图4 S3与S1时的功率谱密度

图5 S4与S1时的功率谱密度

图6 S5与S1的功率谱密度
6 结论
1) 叠加分析法与拓扑网络的结合能够快速有效求得到相对复杂的ISD悬挂构型。
2) 基于叠加分析法与拓扑设计方法建立了6元件两级串联型ISD悬挂构型。得到的4种悬挂构型中,S3和S5构型能够使悬挂系统性能优于传统三元件并联ISD悬挂。
3) 机械阻抗动力学建模方法在悬挂网络构型设计优化时具有普适性。