垂直电磁发射系统及其控制技术研究
2020-03-05郭冀岭孙海亮陆浩然叶联龙
郭冀岭, 孙海亮, 陆浩然, 刘 黎, 叶联龙
(1.西南交通大学电气工程学院,成都 610031;2.北京宇航系统工程研究所,北京 100076;3.西南交通大学牵引动力国家重点实验室, 成都 610031)
0 引言
电磁弹射技术(Elecrtomagnetic Launch,EMI)是利用电磁力驱动物体并将其加速到超高速度的新型发射技术。不同于弹丸型小载荷高速电磁轨道炮、线圈炮电磁发射技术,电磁弹射技术特指大载荷(吨级)、大推力、高速(102m/s级)电磁驱动技术[1]。
早在1980年,美国研究者研究将电磁弹射技术引入飞机、无人机弹射起飞,1999年完成了电磁弹射器EMALS(Electromagnetic Aircraft Launch System)功能验证,利用永磁同步直线电机作为动力,弹射4.5t~45t的飞机,速度在100km/h~370km/h范围内精确调控。2010年12月,成功弹射1架F/A-18E大黄蜂战斗机;2014年EMALS正式装载于福特级航母[2]。英国在无人机电磁弹射技术方面具有领先优势,于2005年完成了 EMKIT(电磁力集成技术)的论证,2007年进行了试验,采用直线感应电机作为动力,弹射行程15m,弹射质量500kg,末速度50m/s,每小时能进行5次弹射[2]。我国的电磁发射技术研究开展稍晚于欧美,在大载荷的电磁弹射领域,海军工程学院马伟明院士团队利用航母舰载机直线感应电机电磁弹射系统可将舰载机(质量为30t~40t)加速至约80m/s[2]。
目前大部分电磁弹射主要集中在舰载机或无人机的水平或水平-滑跃弹射,本文则将电磁弹射技术应用于垂直发射系统。
传统发射采用燃料推进方式,能量密度大,可通过多级方式推动上千吨的载荷,技术成熟度很高,但也存在一些问题。相比传统发射,电磁发射主要优点如表1所示。通过对比可以看出,电磁发射有望成为传统发射的替代(互补)技术,或者取代传统发射方式的第一级燃料推进过程,从而增加有效载荷或增加射程。
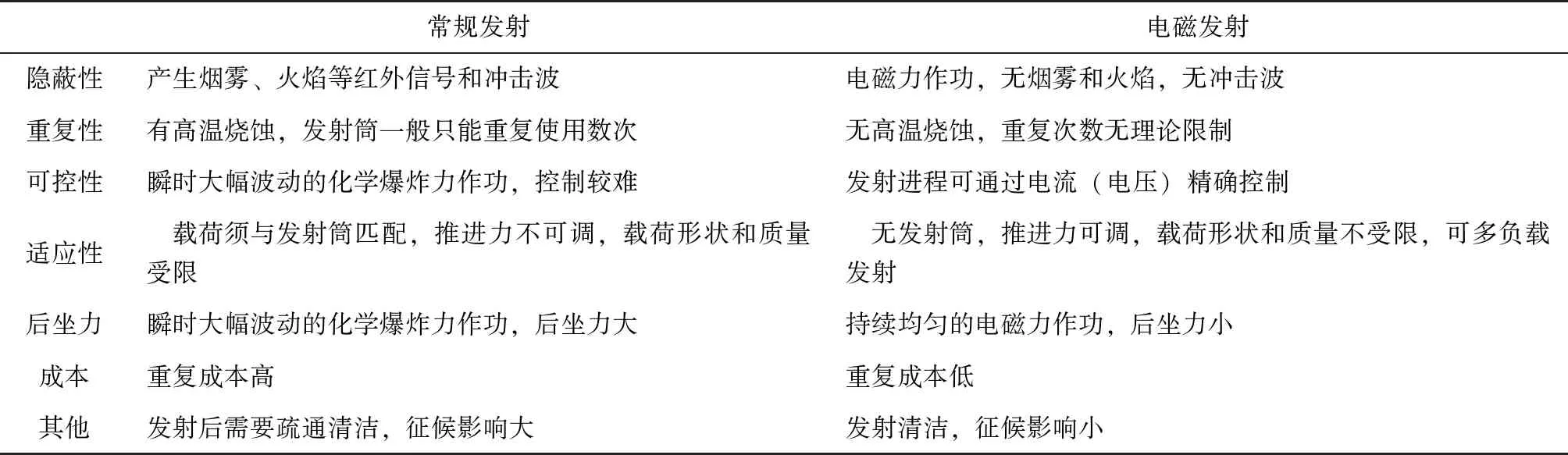
表1 传统发射与电磁发射的对比
1 垂直电磁发射系统构成
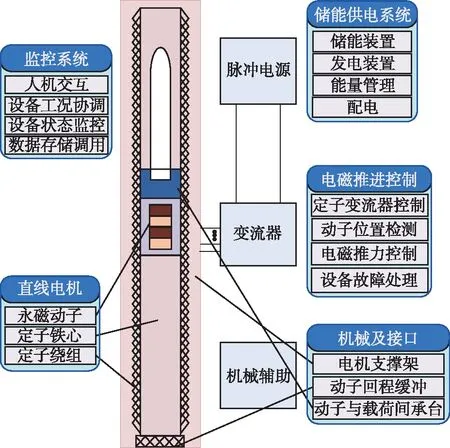
图1 垂直发射装置系统构成图Fig.1 Composition of the vertical electromagnetic launch system
垂直电磁发射系统装置构成如图1所示,其主要构成包括直线电机、变流器控制系统、储能供电系统、辅助机械系统和监控系统5部分。其中,直线电机的动子用于产生推力推动载荷升空;变流器为直线电机供电并根据指令、工况、参数等控制电机运行;储能供电系统用于提供发射所需的能量,并且在发射过程中以电能方式给变流器供电,再由直线电机变为载荷动能;辅助机械系统主要包括直线电机的机械支撑、直线电机动子与载荷之间的机械接口、动子回程缓冲装置等;监控系统用于协调各设备运行逻辑以及运行参数和控制指令的上传下达、数据存储等。
1.1 直线电机
大载荷高速度的井式电磁发射最本质的要求就是大推力,因此提供大推力的直线电机设计与制造最为关键。为了具备输出大推力的能力,同时具有高速的要求,电机在极距、频率、功率等核心参数上与传统直线电机存在很大差异。
适用于电磁发射系统的直线电机类型主要有直线感应电机(Induction Linear Machine,ILM)和直线同步电机(Synchronous Linear Machine,SLM)两种。其中,直线同步电机又分为永磁型(Permanent Magnet SLM,PMSLM)和超导励磁型(Super Conduction SLM,SCSLM),表2为这3种电机的优缺点比较。
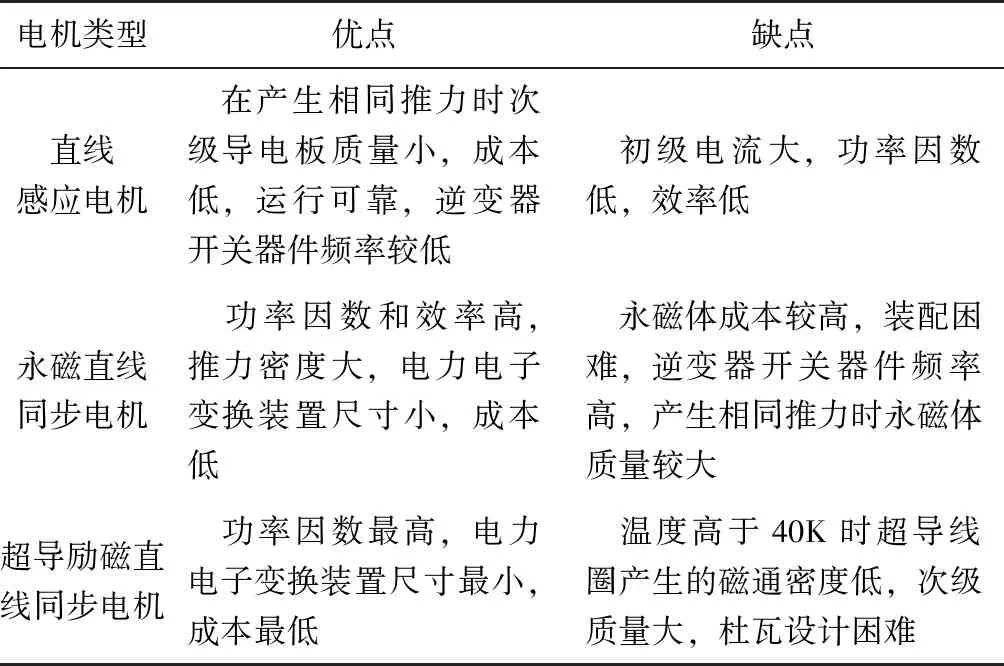
表2 电磁发射系统中3种直线电机的优缺点比较
按照1t载荷100m/s的离架速度,100m的加速距离,所需电磁推力将达到上百kN,超导励磁直线电机目前仅有实验室小功率电机的案例[3],实现如此大功率难度很大。永磁同步直线电机由于定动子双边励磁,效率比直线感应电机更高[4]。同时,为了在有限空间内实现电磁推力最大化,还需要选择适合的直线电机结构。图2为梳状多重化双边永磁同步直线电机结构示意图,该结构相当于多台双边直线电机同时出力,提高了发射系统力密度,而且双边结构有利于降低直线电机法向力的影响,另外在电机绕组设计上采用多相拓扑,有利于降低电磁推力脉动,也有利于变流器主电路功率器件选型。
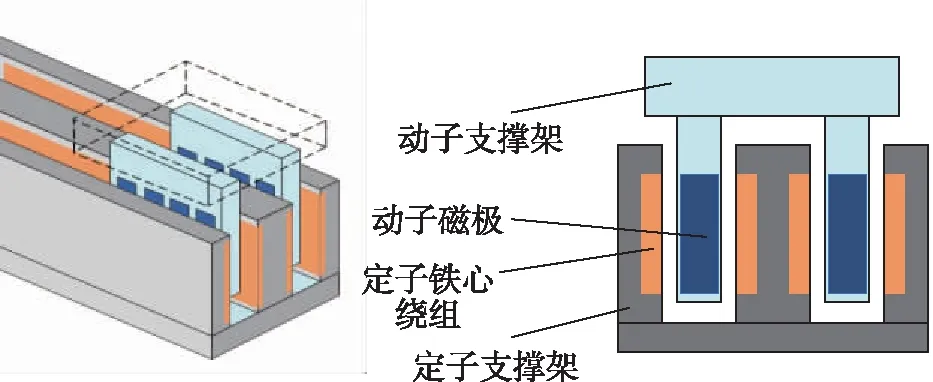
图2 梳状多重化双边永磁同步直线电机结构示意图Fig.2 Structure of the comb-shape double-side permanent magnetic synchronous linear motor
1.2 变流器
直线电机变流控制是实现电磁发射过程精确控制的核心。永磁同步直线电机变流器主要包括主电路和控制器两大部分。
(1)主电路
主电路是指功率器件构成的逆变回路。大功率主电路拓扑中,串联多重化、矩阵变流器需要复杂的功率器件串并联算法复杂,多电平逆变器在控制上存在电容均压等问题,而多相变流器拓扑所需功率器件数量虽多,但其可以利用低压功率器件实现大功率,且其相冗余还提高了系统的可靠性,更具有灵活的可扩展性及较为简单的控制算法,很适合电磁发射系统直线电机变流控制,其拓扑结构如图3所示。
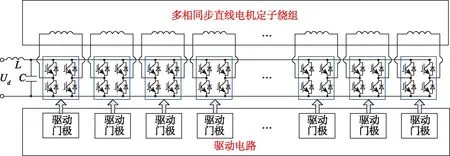
图3 多相H桥逆变器拓扑结构Fig.3 Structure of the multiphase H bridge topology
(2)控制器
控制器采用软硬件控制主电路运行工况,是实现发射过程控制算法的核心所在。针对永磁同步直线电机控制方法[5],主要包括磁链定向矢量控制等算法,即实现位置、速度和电流的三闭环控制,另外还必须采取多种手段抑制推力波动[6],以减小发射过程可能出现的振动、噪声等问题[7-8]。
1.3 储能供电系统
储能供电系统是电磁发射的能量来源。通过对机械储能、电气储能、电化学储能、热储能和化学储能各类方式对比分析可以发现,适合于将能量迅速转化为变流器所需电能的储能方式主要有两类:一是电气储能方式中的电容或蓄电池,适合于小功率发射系统(能量在kJ等级);二是大功率脉冲电源,适合于发射所需能量达到MJ级的大功率储能系统。
其中,脉冲发电机大惯性飞轮储能是一种较为理想的储能方式。其主要构成如图4所示,三相交流电通过变频器给拖动用异步电机供电,带动脉冲发电机转子旋转,当励磁电源为脉冲发电机进行转子励磁后,脉冲发电机即可发出电压,在短时间内供给直线电机变流器。
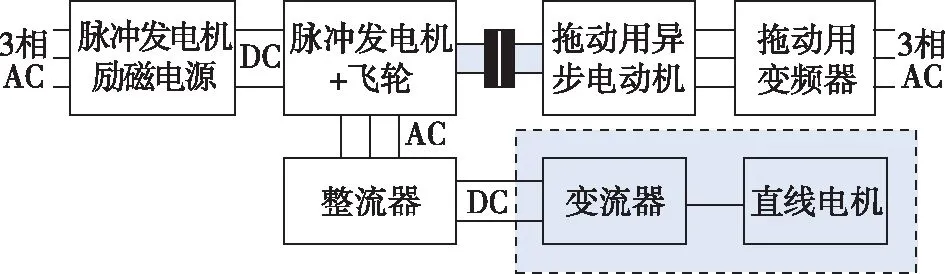
图4 飞轮储能系统构成图Fig.4 Composition of the flywheel energy storage system
1.4 辅助机械系统及监控系统
辅助机械系统主要包括直线电机支撑架、动子下落时缓冲装置等,为满足多规格载荷的适应性和连续发射的要求,还必须对直线电机动子与载荷接口、载荷装填等机械设备进行专门设计。
由于垂直发射系统涉及众多设备,有必要设计监控系统,用于实时监测各设备运行状态、统一协调各设备运行逻辑。
2 样机设计
考虑到大吨位高速率的全尺寸系统的成本和实现难度,有必要在前期设计小型样机并尽可能完成功能验证,样机指标如表3所示。

表3 样机指标
2.1 直线电机样机方案
图5为直线电机样机整体结构,主要包括直线电机及其支撑架、缓冲器等。其中,直线电机为4重双边永磁同步直线电机,4个外侧和两个中间部直线电机定子结构如图6所示;动子断面呈“井”字形,如图7所示。4个翼板上嵌有斜槽型永磁体, 8个滑块与支撑架上的4根导轨构成直线电机动子运动的限位装置,承载板可安装不同接口,以装载不同质量和截面的载荷。
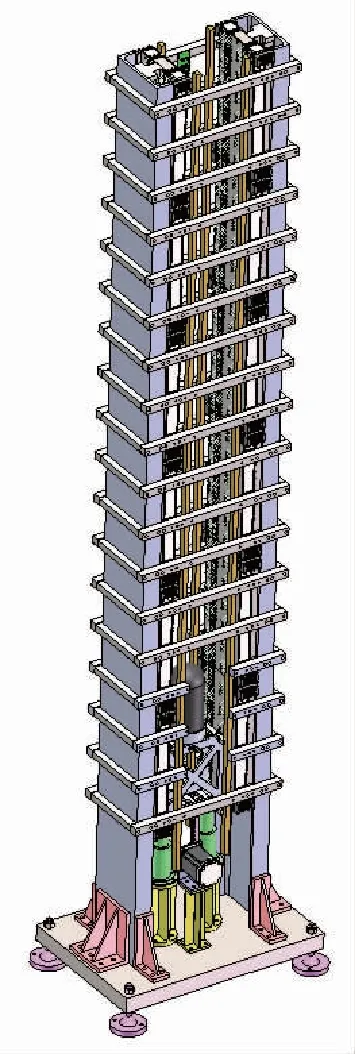
(a)整体结构
(b)断面图5 样机结构示意图Fig.5 Structure diagram of the prototype
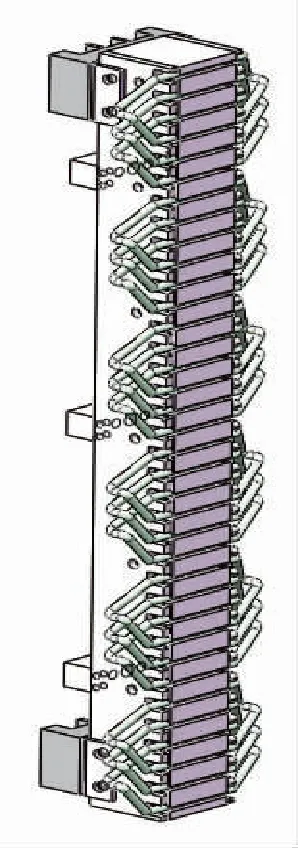
(a)两侧
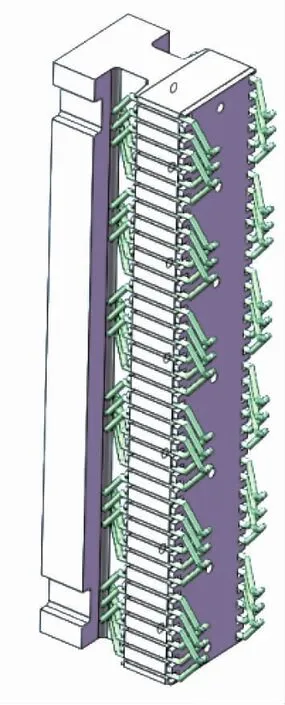
(b)中间
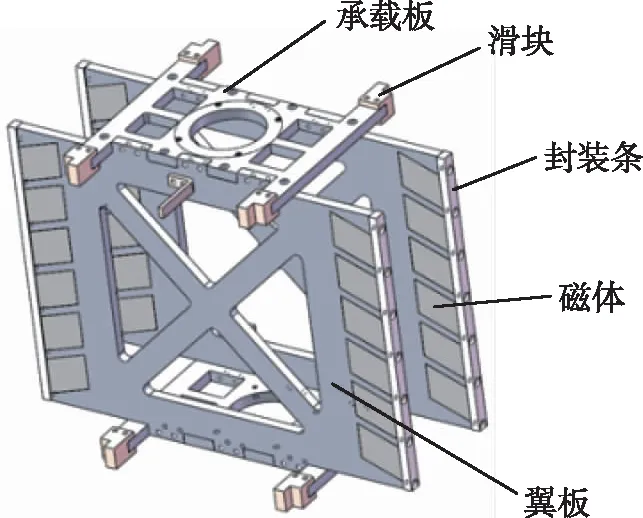
图7 电机动子结构Fig.7 Structure of the mover
2.2 直线电机仿真分析
直线电机电磁性能直接决定系统是否有预期的弹射能力。为此利用有限元(Finite Element,FE)仿真软件对直线电机进行建模和计算,分析其电磁性能。
综合考虑极对数对端部效应的影响,在多重结构与单重结构电磁力成线性正比关系的假设条件下,仿真模型如图8所示,参数如表4所示。
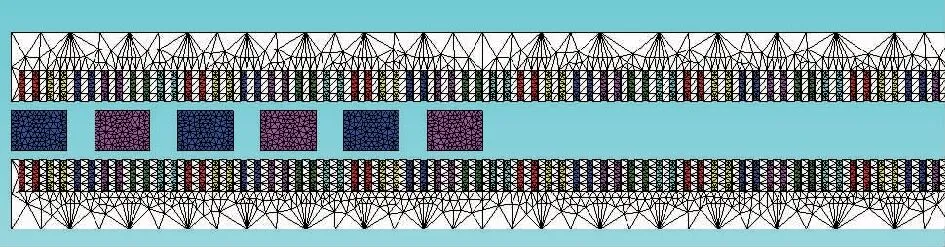
图8 6极双边永磁同步直线电机有限元仿真模型Fig.8 FE simulation model of 6-pole double-side PMSLM

表4 样机系统永磁同步直线电机电磁仿真参数
图9、图10分别为16m/s双边直线电机磁密分布云图和磁动势分布云图,最终得出总的电磁推力达到4.8kN,满足设计指标。

图9 16m/s双边永磁同步直线电机磁密分布云图Fig.9 Flux density distribution of FE model of double-side PMSLM when v=16m/s
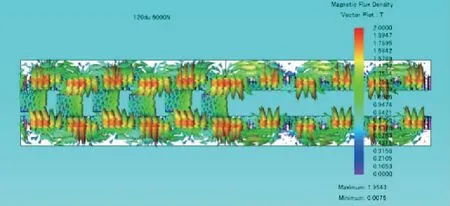
图10 16m/s双边直线电机磁动势分布云图Fig.10 Magneto motive force distribution of FE model of double-side PMSLM when v=16m/s
2.3 变流器方案设计
2.3.1 变流器主电路
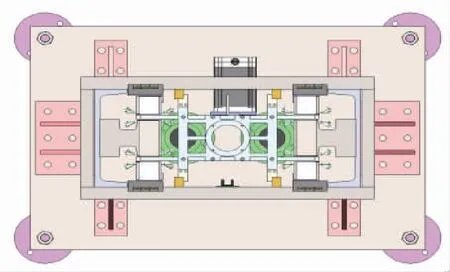
按照电磁计算所得的功率结果,将4重电机分为两组,1号和3号电机串联,2号和4号电机串联,两组并联,分别由一台三相变流器进行控制。最终变流器与电机布置如图11所示。
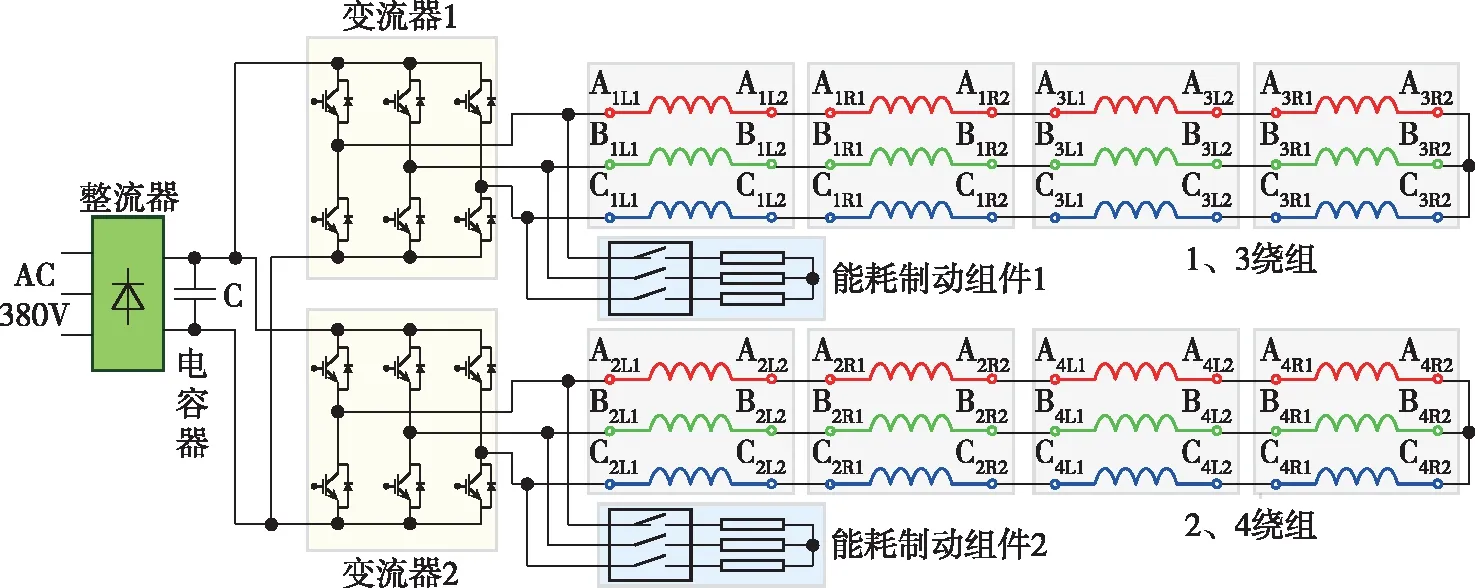
图11 变流器分布图Fig.11 Arrangement of converters
直线电机最大输出功率P=FV=4.8k×16=76.8kW,2台3相变流器,以相电流120A计算可得变流器的输入直流电压UDC=76.8k/3/2/120=106.5V,考虑反电势大小,故选择变流器供电电压300V,IGBT选型为英飞凌FR600R450E3。
2.3.2 变流器控制
(1)动子位置检测
动子位置检测是同步电机实现精准控制的重要环节,如图12所示。采用对射式光电传感器+光栅尺配合的检测方案,通过“绝对编号”+“相对位置”的方法,实现动子位置的定位。
(2)控制器
变流器控制器以高性能单片机作为控制核心,通过检测动子位置和运行工况综合判断,给变流器发出控制指令。具体流程为:由脉冲分配板根据光电位置检测装置所得的动子位置,由主控制器给出相电流给定值,与相电流实际值比较输出驱动信号,对变流器对应相的功率开关器件IGBT的通断及电流大小进行控制,进而控制牵引力的大小。如图13所示的采用脉冲分配板硬件方式进行控制功率器件通断的方法,响应更快,适合高速直线电机。
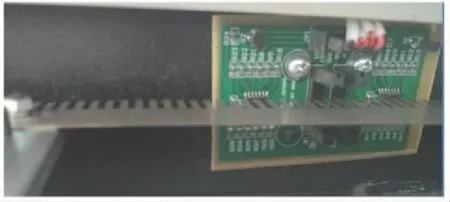
图12 对射式光电传感器位置检测装置Fig.12 Position detection device made of a through-beam optoelectronic sensors
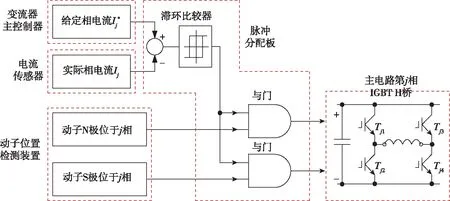
图13 多相永磁同步直线电机变流器硬件控制方式Fig.13 Hardware control strategy of multiphase PMSLM
3 实验验证
为确保垂直电磁发射样机直线电机力能指标及控制功能,首先,利用实验室现有的水平型双边永磁同步直线电机实验平台进行静态及动态功能测试,通过实验结果对垂直电磁发射样机方案的设计与优化提供数据支持。
3.1 实验室小型直线电机平台参数

(a)定子

(b)动子图14 实验室水平型双边永磁同步直线电机平台Fig.14 Horizontal double-side PMSLM in the lab
图14为小型永磁同步直线电机样机,电机初级为长定子轨道,次级采用永磁体结构,动子两侧安装滑轮,与轨道机械接触,实现导向与支撑。定子长度10m,动子长度1m,质量约为20kg的直线电机动子前进速度最大达到4m/s。图15(a)为制作电机时单段定子绕组连接图,图15(b)为动子及其限位装置,外壳为铝合金,内嵌永磁体磁极。定子和动子的参数如表5所示。
直线电机三相变流器由调压器供电,通过高性能单片机XE164FN为核心的主控板进行控制。

(a)定子绕组的连接方式

(b)动子及其限位装置图15 实验室直线电机机构细节Fig.15 Detail structure of the PMSLM in the lab
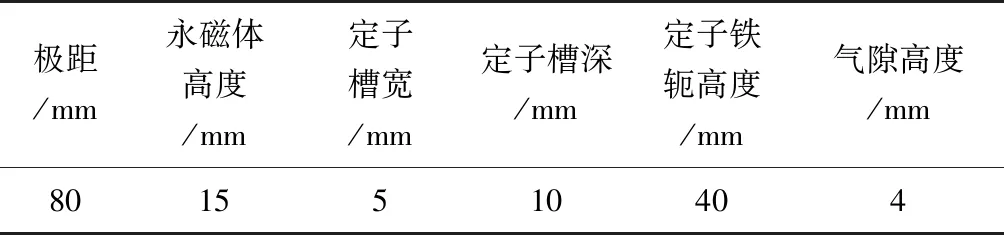
表5 实验室直线电机定、动子参数
3.2 实验室小型直线电机平台实验分析
直线电机样机平台搭建完毕后,进行了动态的速度控制功能试验和静态推力测试试验。
(1)速度控制功能试验
采用如图13所示的控制方法,利用相电流反馈值与给定值进行Bang-Bang调节,给定电流越大,电磁推力越大,速度越快。图16是实验得到的阶梯形状的两相电流波形。
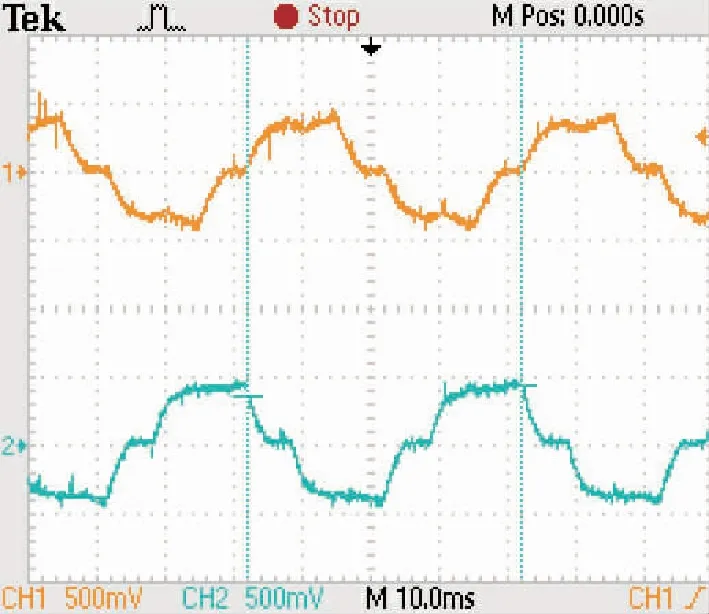
图16 相电流波形Fig.16 Current curve
由于行程较短,动子在起动加速至在线路中部约5m处(速度观测点4)即进行制动。通过设定单边相绕组不同的电流给定值,得到不同速度曲线如图17所示。
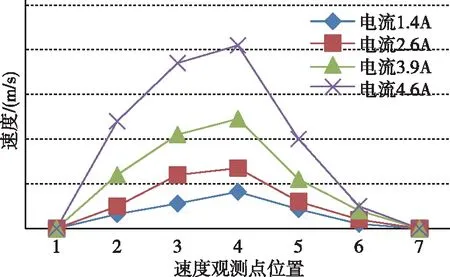
图17 不同给定电流值下的速度曲线Fig.17 Velocity curve with different currents
(2)静态推力测试试验
在动子前段接推力传感器,在输出电压固定频率25Hz下,通过调节变流器输入电压进而改变相电流,从而改变推力的大小。
实验选取了几组不同的电流,采集了对应的推力值,考虑到测量误差以及推力波动,分别记录了最大推力和最小推力两组数据,如表6所示。
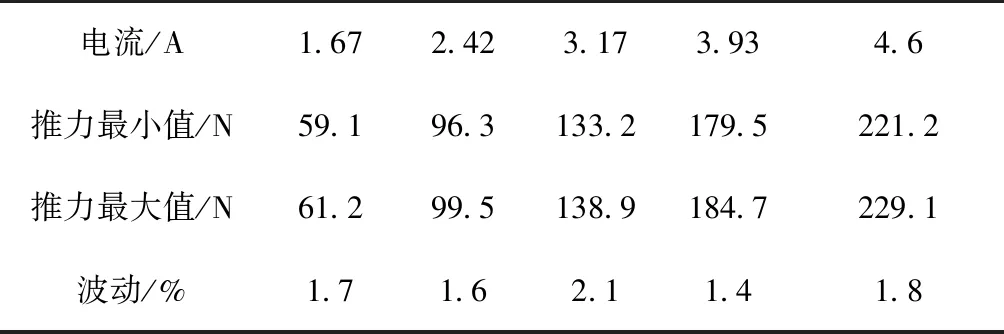
表6 不同电流对应推力实验数据
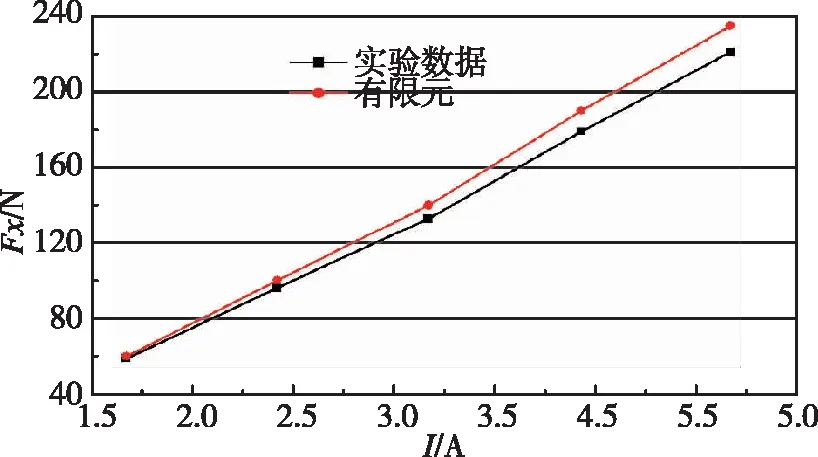
图18 有限元仿真与实验结果推力对比Fig.18 The thrust comparison between the FE simulation result and experiment result
图18给出了实验测试结果与有限元仿真结果的对比。由图18可以看出,电机的实测数据在1A~5A范围内与仿真结果吻合较好。
4 结论
通过电磁仿真和功能试验,验证了双边型永磁同步直线电机在电磁发射应用中在力能指标、变流控制方面的优势。
1)电机采用多重双边永磁同步直线电机结构,采用有限元建模法与实验参数对比可以验证直线电机受力情况,从而为更大尺寸、更多重数、更大电流的全尺寸电磁发射用直线电机设计提供设计经验。
2)变流器采用多相H桥拓扑,控制方式采用光电式传感器,硬件控制快速算法,这无论对于水平运动的缩比样机还是垂直运动的全尺寸系统,在控制技术上是可以通用的,只是在电路规模、器件功率、传感器规模等方面存在差异。
3)缩比样机由于所需发射能量较小,仅需电容储能即可,而全尺寸发射系统所需能量大,必须设计相适应的储能系统,但储能系统相对独立,只需要保证发射过程中输出到变流器上的直流母线电压跌落程度在允许范围内即可,这种实验可以单独设计和验证。
4)机械辅助接口技术涉及具体的直线电机和载荷的质量、形状和尺寸,需要对真实发射场景进行针对性设计。