复合式垂直起降固定翼植保无人机系统
2020-03-04洪其先李润泽许佳悦刘凯翔
洪其先 李润泽 许佳悦 刘凯翔
摘 要:植保无人机近年来快速发展,目前主流的植保无人机多是多旋翼结构。高载荷和长续航一直是多旋翼无人机的一对矛盾,针对此问题设计了一种旋翼/固定翼复合式垂直起降固定翼植保无人机系统。此系统由固定机翼、机身、尾翼、四旋翼、喷洒机构组成,起降时由四旋翼提供升力,巡航作业时由固定机翼提供升力,可以满足原地起降、高载荷起飞、长时间续航的要求。
关键词:垂直起降固定翼无人机;植保无人机;农业航空;精准农业
Compound Vertical Takeoff and Landing Fixed Wing Unmanned Aerial Vehicle System for Plant Protection
Abstract: Plant protection unmanned aerial vehicle (UAV) have developed rapidly in recent years, most of the current UAVs are multicopter layout based, yet conflict always converged between high load and long endurance. Therefore, a multicopter structure UAV system combined with fixed-wing for plant protection is proposed, which embodies both vertical take-off and landing feature. The system consists of fixed wing, fuselage, tail wing, four rotors and spray mechanism. The lift force during takeoff and landing is produced by the four rotors, while fixed wing lifts the fuselage during the cruise operation, which is in demand of vertical takeoff and landing, high-load takeoff and long-term endurance.
Key words: Vertical take-off and landing fixed-wing UAV; Plant protection UAV; Agricultural aviation; Precision agriculture
應用于农林植物保护作业的植保无人机,由导航飞控、飞行平台和喷洒机构三部分组成。通过地面操作人员遥控或飞控智能控制完成喷洒作业。可以用于喷施农药、种子、粉剂等。植保无人机的出现和发展极大改变了原有背负式喷雾器的低效率、高人力负担的状况[1-2]。
我国目前进行植保作业的无人机多为六旋翼或者八旋翼的无人机。这种多旋翼无人机通过控制各旋翼转速以实现悬停、俯仰、滚转和偏航等运动姿态。升力全部由高速旋转的旋翼提供的多旋翼无人机耗电快,续航短[3]。固定翼无人机的升力由流过机翼表面的气流提供,发动机只提供水平方向牵引力,耗电慢,续航长且起飞载荷大,但具有无法悬停、起降条件苛刻等诸多弊端,不能广泛适应植保作业环境条件。
将四旋翼和固定翼无人机结合为一款新型的复合式垂直起降固定翼植保无人机,相较于传统的多旋翼或固定翼结构,复合式垂直起降固定翼无人机兼具二者的优势[4],将二者起飞条件要求低、可垂直起降、稳定悬停、良好的低速/高速飞行性能、续航时间长的优势结合,具有较好的应用前景。
1 飞行平台总体设计
1.1技术指标
最大有效载重:30kg;最大起飞重量:40kg;巡航作业高度:10m;
巡航作业速度:15m/s;续航时间:≧30min
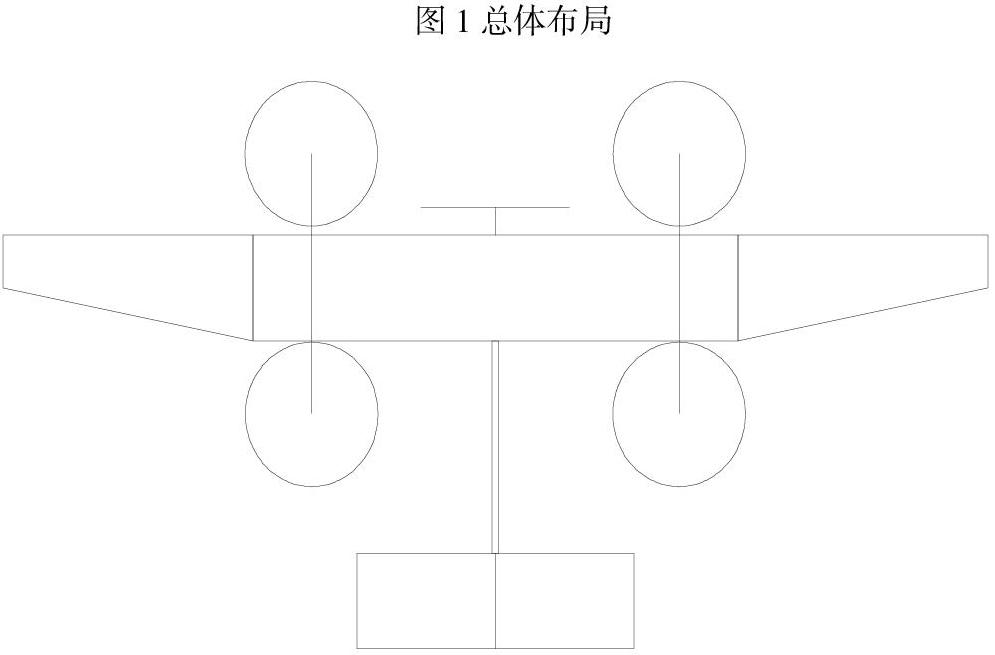
1.2 总体布局
总体采用上单翼常规布局形式,融合H型四旋翼布局,四个旋翼对称安装于机身两侧,如图1所示,可获得良好的稳定裕度。为减小旋翼的下洗气流对固定翼的影响,旋翼水平安装位置在固定翼下翼面;旋翼与固定翼之间的安装距离为0.1米以减少旋翼平飞阻力 [5]。
1.3参数确定
1.3.1 固定机翼参数
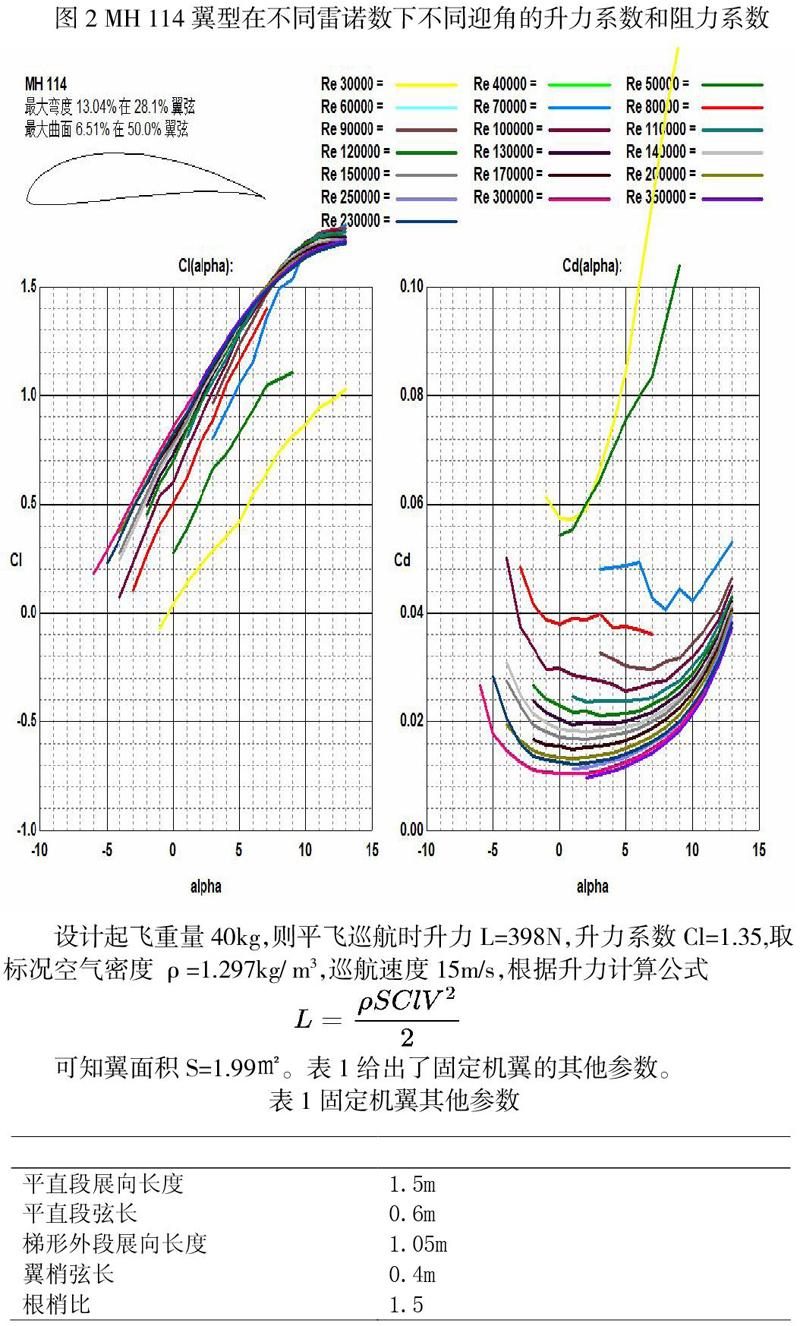
为得到较低的巡航阻力和较高的巡航升力[6],固定翼翼型确定为高升阻比翼型MH114 ,参考Profili分析得到的MH 114 翼型在不同雷诺数下不同迎角的升力系数和阻力系数,见图2,在5度气动迎角得到最大升阻比,雷诺数取25000时升阻比约为99.5,升力系数约为1.35。则可确定机翼安装角为5度。
设计起飞重量40kg,则平飞巡航时升力L=398N,升力系数Cl=1.35,取标况空气密度ρ=1.297kg/ m3,巡航速度15m/s,根据升力计算公式
可知翼面积S=1.99㎡。表1 给出了固定机翼的其他参数。
巡航动力采用T-MOTOR的U15 100KV无刷直流电机,可满足高载荷巡航要求,推重比大于0.5。
1.3.2 多旋翼参数
多旋翼部分采用T-MOTOR的U12 II 120KV无刷直流电机作为动力,搭配120A FOC电调、T-MOTOR G30×10.5 螺旋桨、10~14s 三元锂电池可以达到最大单个19.8kg的拉力,四旋翼共79.2kg的拉力,保证强阵风等突发极端情况下有充足动力维持姿态稳定。轴距为1.5m。
2 电子控制系统设计
复合式垂直起降固定翼植保无人机的电子控制系统由Pixhawk自驾仪[7]、GPS模块、光流模块、舵机和电子罗盘组成。
(1)Pixhawk自驾仪拥有高性能单片机控制核心,搭载ArduPlane开源固件,完美支持VTOL飞行方式,双核心冗余控制系统,处理速度快,工作稳定。其内置的电子陀螺仪可以实时监控飞行器姿态并将姿态数据输出给主控芯片,由主控芯片进行数据处理并控制舵机和各个电机实现姿态闭环控制。Pixhawk内置的气压计以及外置光流模块可以实现无人机定高飞行,稳定的高度对喷洒施药极为重要[8]。
(2)舵机是控制系统的执行机构,通过操纵各个舵面实现无人机巡航過程中的俯仰,横滚和偏航控制。
(3)GPS模块给出无人机定位信息,实现航线规划功能,在导入地形数据后可沿地形作业以良好适应山地丘陵等农业作业环境。
(4)电子罗盘实时监测无人机偏航角,巡航时融合gps航向数据,为飞行器提供稳定的航向控制;在垂直起降阶段,无人机偏航感知完全依赖电子罗盘,依靠电子罗盘的偏航角数据进行航向控制。
3.植保喷洒系统设计
植保喷洒系统由30L大容量水箱、流量控制电机、压力传感器、流量传感器、喷管、喷头组成。
3.1植保喷洒系统工作原理[9]
无人机植保喷洒系统受Pixhawk主控核心控制,将巡航作业高度、速度数据计算后输出流量控制信号给四路流量控制电机,电机分别从水箱中抽取药水通过喷管输送到喷头喷施药液。主控核心通过检测压力传感器和流量传感器反馈的信号再次输出流量控制信号,形成闭环控制系统,精准控制每个喷头喷施药量,达到均匀喷施效果。
3.2植保喷洒系统安装
为减小喷洒系统对巡航过程的气动影响,选择将水箱安装于四旋翼几何中心上,此点同时为整机重心。为高效利用无人机巡航作业时产生的流场,四路施药喷头沿展向均匀安装在距机翼后缘水平位置后0.1m垂直位置下0.1m处。此处处于固定翼下洗气流之中,强大的下洗气流可以有效抑制农药漂移[10-11],从而减少施药量。
结论
本复合式垂直起降固定翼植保无人机系统结合了多旋翼无人机和固定翼无人机的优点,为植保无人机提供了一种新的解决方案。通过合理的气动布局设计,利用基于市场现售动力产品组合,设计了一款30kg有效载重,30分钟长续航的复合式垂直起降固定翼植保无人机,具有原地垂直起降,低空高速巡航作业,可规划航线自主飞行作业,精准定量喷施等优点,能够良好适应植保应用场景。有效改善了多旋翼植保无人机续航时间短,载重量小的缺点。
参考文献:
[1]高洪波,苏周,张兆海.垂直起降固定翼无人机发展趋势分析[J].科技创新导报,2019,16(22):232+237.
[2]兰玉彬,陈盛德,邓继忠,周志艳,欧阳帆.中国植保无人机发展形势及问题分析[J].华南农业大学学报,2019,40(05):217-225.
[3]王俊凯,刘萍,王军建.农用植保无人机外观造型现状及应用[J].农业装备技术,2019,45(02):62-64.
[4]于进勇,王超.垂直起降无人机技术发展现状与展望[J].飞航导弹,2017(05):37-42.
[5]张飞,王云,谭锟.复合式垂直起降固定翼无人机旋翼和机翼的干扰分析[J].航空工程进展,2019,10(06):810-816.
[6]刘媛媛. 垂直起降固定翼无人机设计、控制与试验[D].南京航空航天大学,2018.
[7]黄麒家. 高地隙植保机变量喷药系统试验研究[D].湖南农业大学,2019.
[8]何龙,郭辉,佟灵茹,甄世婵,谢志轩,张成.基于PIX开源飞控果园植保作业车设计及应用[J].农业工程,2019,9(12):31-34.
[9]李增坤. 植保机喷药控制系统设计与开发[D].沈阳工业大学,2019.
[10]王浩. 植保无人机喷头布局对喷洒效果的影响[D].山西农业大学,2018.
[11]赵彬彬. 多旋翼飞行器用于大田植保作业效果研究分析[D].河南农业大学,2017.
作者简介:
洪其先(1998-),男,满族,河北承德人,就读于河北农业大学机电工程学院电气工程及其自动化专业。
基金项目:本文系大学生创新创业训练计划项目研究成果
项目编号:S202010086014
(河北农业大学 河北 保定 071001)
