基于超绿特征与形态学的植保无人机图像农作物分割
2017-09-12张庭亮甄倩倩
张庭亮+甄倩倩


摘 要:航拍图像农作物分割为植保无人机路径规划与自主导航提供了新的思路。文章基于超绿特征与形态学的分割方法,在RGB空间下提取图像超绿特征,采用OTSU算法基于超绿变换进行阈值分割,分割后的图像使用形体学方法滤除噪声,掩模运算后得到完整的农作物分割图像。经过实验,可以有效分割出植保无人机拍摄的棉花幼苗与玉米苗。
关键词:超绿特征;形态学;植保无人机;图像分割
中图分类号:TD40 文献标志码:A 文章编号:2095-2945(2017)26-0020-03
农业是国民经济的基础,在国家农业政策的推动下,精准农业与规模化成为农业种植的一种趋势。传统的作业方式已无法满足大规模种植的需要,植保无人机应运而生。植保无人机作业具有高效、安全、环保、节能等特点,在植保领域具有独特优势,必将成为农机装备现代化升级的主要助力[1]。在实际的作业条件下,自然环境复杂多变,不同作物形态也存在一定差异。植保无人机自主导航和路径规划的能力受限于农作物图像提取,本文以航拍棉花幼苗和玉米苗为研究对象,可以得到高还原度分割图像,且具有稳定性与抗干扰能力[2-3]。
1 超绿特征提取
1.1 RGB空间
颜色空间是三维彩色空间中一个可见光子集,包含某个色彩域的所有色彩,建立过程基于人的生物学基础。视网膜上颜色“传感器”是锥形感光细胞,主要分为红敏细胞(?姿=564nm)、绿敏细胞(?姿=534nm)和蓝敏细胞(?姿=420nm)。RGB 空间在计算机视觉中是一种常用的颜色空间,每种颜色基于笛卡儿坐标系出现在红、绿、蓝的原色光谱分量中。颜色空间建立如图1(a)所示的立方体,沿着主对角线从点(0,0,0)的黑色到点(1,1,1)的白色是灰度值。三基色R、G、B相互独立,其中任一分量均不能由其它分量运算产生,而所有其它颜色都可以由三基色按不同的比例组合得到[4]。RGB 彩色空间颜色域如图1(b)所示。
RGB三维空间中,目标颜色所对应的三个空间分量都是一个集合,且对于相近的颜色,集合不具有唯一性。无法设定固定阈值进行处理,只能将彩色的分量图像转化为我们所熟悉的灰度图像进行阈值分割。具体的分割过程如图2所示,首先将RGB农作物图像进行超绿特征提取,基于超绿特征进行OTSU阈值分割,分割图像经过形态学滤除噪声,掩模运算后得到农作物分割图像。
1.2 超绿特征提取
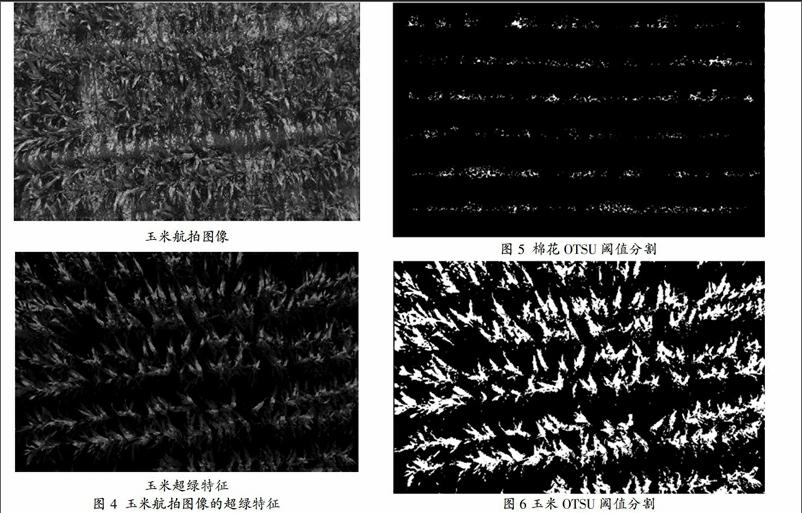
超绿特征2×G-B-R是农业图像处理中常用的一种特征模型,它提高了绿色通道的权重,增加了与非绿色背景的对比度,利用该特征能够较好地提取出绿色农作物的信息。因此该模型被广泛应用于农业产品检测、农业机器人的视觉导航以及杂草识别等方面[5]。棉花航拍图像的超绿特征如图3所示,玉米航拍图像的超绿特征如图4所示。
2 基于超绿特征的阈值分割
经过超绿特征变换的目标图像,阈值分割的方法选择较多。OTSU阈值法基于分割后类内方差最小的最优准则[6-11]。设航拍图像M有L个灰度级数,第i级灰度像素点为Ni,图像的像素总数为N,则第i级像素点的概率为Pi=Ni/N,我们设定阈值为K,图像可以分为C0类(灰度级0~(K-1))与C1类(灰度级K~(L-1))。航拍图像的平均灰度为:
(1)
C0类像素的平均灰度:
(2)
C1类像素的平均灰度:
(3)
类间方差计算式:
其中,?棕0是C0类像素比,?棕1是C1类像素比,阈值K在0~(L-1)中变化,?啄2(k)最小时获得最优阈值。棉花图像OTSU阈值分割结果如图5所示。玉米图像OTSU阈值分割结果如图6所示。
3 形态学滤波
图像形态学运算的基本语言是集合论,利用一个结构集合对目标图像进行探索,结构集合的选取不同则可以在探索的同时改变目标图像的几何特征,达到图像处理的目的。基础运算如下:
(1)膨胀与腐蚀
二值图像的形态学运算,灰度分别为0和1,设图像前景区域是灰度为1的像素集合S,图像的背景区域是灰度为0的像素集合。结构元素集合C,膨胀用“?茌”表示[7],定义为:
腐蚀运算用“ ”表示,定义为:
(2)二值开启和闭合
二值图像的开启运算和闭合运算就是膨胀和腐蚀先后顺序不同的组合,定义如下,其中“△”表示开启,“”表示闭合。
形态学滤波过程如图7所示。
基于MATLAB2015實验平台,棉花航拍图像形态学滤波及分割结果如图8所示,玉米航拍图像形态学滤波及分割结果如图9所示。
4 结束语
在航拍图像的RGB空间下提取超绿特征,基于特征图像采用OTSU阈值法进行初分割,采用形态学处理滤除噪声,MATLAB2015实验平台对棉花与玉米的航拍图像实验结果表明,对于一般的绿色农作物航拍图像,该方法具有一定的可行性。有助于农作物长势预测及特征分析,有助于植保无人机路径规划与自主导航。
参考文献:
[1]冷志杰,蒋天宇,刘飞,等.植保无人机的农业服务公司推广模式研究[J].农机化研究,2017(01):6-9.
[2]张俊才,范利勇,李善娟.智能植保机低矮作物自主作业导航线提取方法的研究[J].南方农机,2017(06):4.
[3]胡泊.基于多维图像特征的农作物长势评价方法[D].北京交通大学,2014.
[4]关丛荣,王虹.基于RGB空间的彩色图像处理GUI设计[J].黑龙江工程学院学报,2008(02):66-70.
[5]赵博,宋正河,毛文华,等.基于PSO与K-均值算法的农业超绿图像分割方法[J].农业机械学报,2009(08):166-169.
[6]张娜.树木图像分割方法的研究[D].东北林业大学,2013.
[7]茅正冲,刘永娟.基于颜色特征的玉米雄穗图像分割[J].传感器与微系统,2017(02):1-4.
[8]申铉京,刘翔,陈海鹏.基于多阈值Otsu准则的阈值分割快速计算[J].电子与信息学报,2017(01):144-149.
[9]徐青,范九伦.新的基于分解直方图的三维Otsu分割算法[J].传感器与微系统,2017(01):119-122+126.
[10]肖明尧,李雄飞.基于高斯分解的多尺度3D Otsu阈值分割算法[J].吉林大学学报(工学版),2017(01):255-261.
[11]关强,薛河儒,姜新华.基于二维OTSU的田间植物图像分割方法[J].江苏农业科学,2015(12):437-440.endprint
