配网带电维护移动机器人可用工器具及控制系统的探究
2020-03-04陈柏希赵镔赵毅林刘韵涵
陈柏希 赵镔 赵毅林 刘韵涵


摘 要:本文主要開展带电维护移动机器人的控制系统,旨在更好的满足变电站带电维护需求,旨在研究专门的自动剥皮器,更好的开展高压带电作业,这一设备的结构设计比较简单,机器人可以实现夹持操作。且该设备的绝缘性较好,性能安全,可靠,还可以实现远程遥控。
关键词:变电站设备;控制系统;带电维护;移动机器人
高压带电作业,可确保供电设备的安全运行,确保设备的可靠性,以此实现经济效益的提升。就实际情况而言,当前的高压带电作业剥皮器均为手动操作,绝缘性与防护性较低,操作过程中的不安全因素较大。
1 手动剥皮器的分析、设计经验
1.1 特点分析
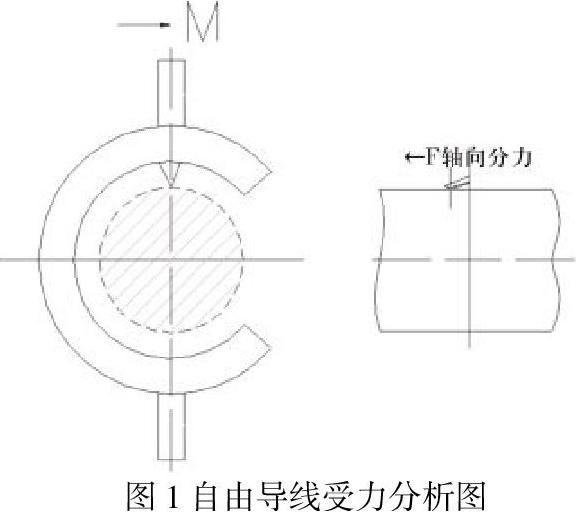
操作人手动施加压力,将刀具刺入到导线绝缘层内;进行刀具螺旋切削,操作人员双手旋转,形成M形状的刀偶,沿着轴向,进行刀具推动,其结构如下图1所示。
操作人员停止轴向的进给,导线为刀具环切,将其自动断屑。此部分刀具的截面为月牙型,三面均设置有刀刃,中间可进行排屑操作,以此避免切屑与导线性成缠绕。
选择的是棘轮传动式的手动剥皮器,促使双弹簧的棘爪在传动位置上,且可以开口位置保持一致。机械臂开展直线插补传动,驱动刀具进行相应的运动,刀具与导线倾斜,借助切削分力,以此实现轴向给进。借助相应的润滑脂,报站切削的合理性。在多次棘轮传动式剥皮器实验过程中,其工艺设计比较可靠,加工精准度较高,可确保切削效率与质量。
1.2 原理分析
机器人专用剥皮器,本身由压紧、棘轮驱动组成,结合架空导线的作业特点,其工作原理包括:1.导线可开展夹紧作业,机械臂能够手抓导线,以此发挥支撑作用,可以更好的固定导线,如此便可实现切削力作用,促使导线在作用力下扭转变形,以此完成切削作业。2.操作人员将导线压紧,固定,促使其存在于刀具V型槽内,更好的调节螺栓,并将其拧紧,接着进行压刀作业,注重刀具切入绝缘层深度的控制,确保裸露在外的切近深度适宜。合理调整刀具的倾斜角度,促使其朝着导线的直径心移动。3.确保其可为机械手抓、刀具固连约束,促使其在导线上开展自由运动。4.刀具切削刀刃的设计本身具备较强的特殊性,应当适当的进行产销分力。
2 变电站设备带电维护移动机器人系统
移动机器人控制系统能够整合任务认知、动态行为及动态分解(决策)、执行、控制等融为一体,能够为变电站设备机器人适应环境提供便捷。设计的控制系统,可实现人机交互局部控制,能够切实满足维护需求。
2.1 复杂混合式分层控制系统
综合考虑高压电的变电站环境,带电维护作业及任务需求等,判断系统的安全性、灵活性、稳定性、开放性与可控性,其控制系统如下图3所示。该设计能够将机器人对变电站环境、设备内部信息的感知能力提升。
该机器人本身为混合式的分层控制系统,将控制、规划、感知、通讯与调度纳入其中。整个控制系统可大致划分为上位机、机器人信息处理、机器人车载控制,人机交互策略显著,智能调节控制明显,可切实满足移动机器人在高压变电站中的相关作业需求,作业开展安全要求。
2.2 维护任务运动控制的实现
2.2.1 Motion Perfect 软件介绍
变电站的带电维护移动机器人,其程序均是在这一软件上,并使用Trio BASIC 逻辑语言开展程序编写。本程序编写选择的是最新版本,系统运用的最新微软,着重进行NET和WPF技术开发,可连接到PC,提供广泛的安装运行环境。在Windows XP(7)系统上,也可稳定运行。软件界面上,能够调取各个轴电机的情况,掌握相应的信息,查看子程序的运行情况,反映出机器人当前运行情况与外部设备运行情况[4]。
2.2.2维护任务运动控制策略
变电站带电设备主要是维护机器人开展任务控制,如下图4所示。该系统主要划分为子系统、机械运动控制子系统。
通过控制维护机器人管控系统,预设停靠点(该点位由预埋的RFID标志位决定)。停靠之后,子系统控制机械臂的运动,促使相应的工具开展维护作业及相关任务。
这一控制方式的应用,不会存在复杂控制的情况,其可实现协同运动。控制方法简单,可确保控制稳定,其精度较高,可更好的满足带电维护作业需求。
2.2.3 子程序设计
移动机器人运行维护期间,不管是自主状态,还是远程遥控下的运行,其运动均需要子程序的支持。该程序的应用,能够维护机器人的左右、前后、旋转等运行作业。
2.3上位机控制系统的设计
为更好的将变电站设备带电维护移动机器人交互功能凸显出来,本文设计的是一个有利于维护人员操作的控制系统,上位机控制系统的应用,可更好的满足系统功能需求,为后期的维护与扩展提供便捷。本文运用编程语言(C#),完成该机器人的上位机设计。上机位控制系统如下图5所示,可更好的维护移动机器人的上位机控制结构,实现多个任务同时操作,多个窗口同时显示。
3 结束语
综上所述,为了更好的开展变电站带电设备移动机器人系统的设计工作,实现自动化办公,确保机器人的安全性与灵活性,本文提出一种混合式的分层控制系统。系统内细致划分为调度、通讯、感知、规划与控制几个层面。详细的介绍了上机位、信息处理系统、车载控制系统积分部分的职责,探索其功能。简单介绍了机器人运动控制,给出了运动控制策略,完成了子程序的设计。为实现人机交互功能的有效维护,本文还设计了上位控制系统。最终开展了变电站环境模拟,开展现场实验,最终结果表明效果良好。
参考文献:
[1]钱建国,施正钗,李英,杨兴超,郑俊翔.基于自学习的电网设备故障自动辩识方法研究与应用[J].电子设计工程,2020,28(06):22-25+34.
[2]易慧,潘雄,潘晓柏,李小强,江浩田,何莲.基于物联网的变电站设备控制柜类湿度监测与风险评估系统[J].仪器仪表与分析监测,2020,15(01):1-7.
[3]贺延峰,杨贤明,齐加恩,王雪研,周坤,罗建平,陈宏伟.一种智能变电站设备监控信息点表自动配置方法的研究与实现[J].自动化应用,2019,05(11):78-81.
[4]张营. 变电站设备带电维护移动机器人控制系统研究[D].山东建筑大学,2017,43(04):109-114.
项目名称(配网带电作业智能机械臂关键技术及应用研究)和项目编号(050100KK52170012)
(云南电网有限责任公司昆明供电局 云南 昆明 650000)
