基于模糊PID的小型ROV定深运动控制仿真
2020-03-04綦声波尹保安苏志坤
綦声波 尹保安 苏志坤


摘 要: 针对小型ROV定深运动的非线性、时变性及干扰因素复杂等问题,对小型ROV的定深运动控制进行研究。根据小型ROV的形体结构,建立小型ROV定深运动控制模型,通过对传统PID控制及模糊控制的学习,将模糊技术与传统PID控制相结合,设计基于模糊PID的小型ROV控制器,并在Simulink仿真环境中将模糊PID控制与传统PID控制的控制效果进行仿真比较。实验结果表明,基于模糊技术的PID控制器能有效提高系统的响应速度,减少系统的超调量,并提高系统的抗干扰能力,更有利于小型ROV的定深运动控制。
关键词: 小型ROV; 定深运动; 模糊PID控制; 模型建立; 仿真实验; 结果分析
中图分类号: TN876?34; TP242.3 文献标识码: A 文章编号: 1004?373X(2020)02?0020?04
Simulation of small?size ROV′s specified?depth motion control based on fuzzy PID
QI Shengbo, YIN Baoan, SU Zhikun
Abstract: In allusion to the problems of non?linearity, time?varying property and complex disturbance factors of specified?depth motion of small?size ROV, the specified?depth motion control of the small?size ROV is studied. The specified?depth control model of the small?size ROV is established according to the shape structure of the small?size ROV. The fuzzy technology and the traditional PID control are combined by studying the traditional PID control and the fuzzy control to design a small?size ROV controller based on fuzzy PID. The control effects of the fuzzy PID control and the traditional PID control are compared in Simulink simulation environment. The experimental results show that the PID controller based on the fuzzy technology can effectively improve the response speed and anti?interference ability of the system, and reduce the overshoot of the system, which is more conducive to the specified?depth motion control of the small?size ROV.
Keywords: small?size ROV; specified?depth motion; fuzzy PID control; modeling; simulation experiment; result analysis
0 引 言
小型ROV是水下机器人的一种,一般工作在狭小的海域或浅水中代替人类进行资源的开发,在这些环境中小型ROV容易受到浪涌和水流等外力作用而改变运动轨迹或运动姿态。深度控制是小型ROV控制的关键技术之一,它可保证ROV维持在指定的水深,克服水下洋流的干扰,实现水下稳定悬停作业,对于水下资源的开发具有重要意义[1]。
小型ROV定深运动具有非线性、时变性、各个自由度运动之间存在复杂的耦合关系等特点,而且其精确的数学模型往往是难以获得的。目前定深运动控制多采用传统PID的控制方法,传统PID控制虽然算法成熟,稳定性好,但它是基于系统精确模型设计的,鲁棒性和自适应较差,难以控制非线性、不确定的复杂系统,对于小型ROV的定深控制难以取得较好的效果[2]。模糊控制是一种基于规则的控制方法,不需要建立对象的精确数据模型,将模糊控制与传统PID控制相结合,能够很好地解决系统的非线性问题,鲁棒性、快速性和精确性均较好。本文根据小型ROV定深运动控制模型,设计了基于模糊PID的小型ROV控制器,并在Simulink仿真环境中将模糊PID控制和传统PID控制的控制效果进行仿真比较。实验结果表明,模糊PID控制比传统PID控制在动态性能方面具有明显的优势,更有利于小型ROV的定深运动控制。
1 小型ROV运动控制模型
1.1 小型ROV形体结构
本文以实验室自主研发的小型ROV为研究对象,长、宽、高分别为0.59 m,0.3 m和0.305 m,在空气中的质量约为14.58 kg,稳心高度约为0.066 m。小型ROV主要由主体框架、浮力材料、配重块、水下推进器、控制舱、电池舱、水下照明灯和水下摄像机组成,具有四个自由度的运动。水平方向安装了左右两个推进器,能控制小型ROV在水平面内完成前进和摇艏运动;垂直方向安装了前后两个推进器,能控制其在垂直面内完成潜浮和纵倾运动。小型ROV三维模型如图1所示。
为了提高小型ROV整体的稳定性,密度较大,能提供较大重力的零部件,如电池舱、控制舱和配重块等都安装在主体框架的下底面,而密度较小,体积较大,提供潜体主要浮力的浮力材料则安装在主体框架的上平面,这样重心就会落在潜体的下底面,浮心落在潜体的上平面,提高了小型ROV整体的稳心高度,增大了小型ROV的自身的扶正力矩。
1.2 小型ROV定深运动方程
在水中做定深运动时,小型ROV主要承受重力、浮力、垂直方向推进器产生的推力和流体水动力的作用,研究小型ROV在这些力作用下的运动规律,从而建立小型ROV的定深运动控制模型,是研究和设计小型ROV定深运动控制算法的基础[3]。
空间运动方程可表示小型ROV的定深运动状态,根据动量定理[4],小型ROV在载体坐标系下沿oz轴的运动表达式为:
[Z=m[w-uq+vp-zG(p2+q2)+xG(rp-q)+yG(rq+p)]] (1)
式中:Z为小型ROV在oz轴上所受的合外力;m为小型ROV的质量;u,v,w为小型ROV沿ox轴、oy轴、oz轴的速度;p,q,r为小型ROV沿ox轴、oy轴、oz轴的角速度;xG,yG,zG为小型ROV的重心位置。
在定深运动方向,小型ROV所受的合外力表达式如下:
[Z=G+B+ZT+ZF] (2)
式中:G为重力;B为浮力;ZT为垂直方向推进器产生的推力;ZF为流体水动力。将式(2)代入式(1)左边,并假设小型ROV的重心位于载体坐标系原点处,其横移的速度和加速度[v=v=0],横倾和摇艏的角速度和角加速度[p=r=p=r=0],可得定深运动方程为:
[ZT=(m-Zw)w-(m+Zq)uq-Zqq- Zwuw-Z*u2-Zwqwq-Zwuw- Zww(ww+w2)-(G-B)cos θ] (3)
式中:[Zw],[Zq]為有因次水动力系数;θ为纵倾角。
1.3 小型ROV定深运动控制模型
由式(3)可以看出,定深运动与其他自由度的运动存在耦合关系,且存在非线性水动力项,为方便定深控制模型的建立,本文将对定深控制模型做一定线性化和简化处理[5]。
定深运动时,假设小型ROV的进退速度恒定不变,即[u=0],且假设u=1 m/s;垂直方向的两个推进器假设输出的推力大小相同、方向一致、力臂长度相等,即小型ROV不会绕oy轴做纵倾运动,纵倾的角速度和角加速度[q=q=0],纵倾角θ=0°;假设小型ROV在水中处于悬浮状态,忽略非线性水动力项。故可对式(3)进行化简,化简后的定深运动方程为:
[ZT=(m-Zw)w-Zww] (4)
此时,可认为在固定系中,小型ROV所处深度[ζo=w],[ζo=w],则由式(4)可得小型ROV深度ζo与垂直方向推进器输出推力ZT之间的传递函数,传递函数如下:
[GD(s)=ζo(s)ZT(s)=1(m-Zw)s2-Zws] (5)
将相关参数代入式(5),可得小型ROV定深运动控制模型的具体传递函数为:
[GD(s)=122.419 3s2+4.730 6s] (6)
2 定深运动模糊PID控制器设计
2.1 模糊PID控制系统结构
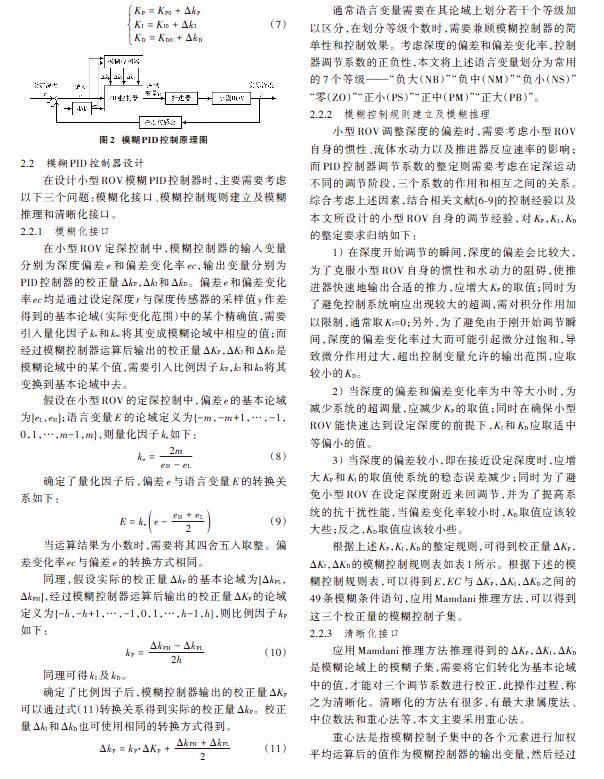
小型ROV模糊PID控制器的核心思想是根据操纵人员的实际操纵经验和运动控制系统不同的偏差及偏差变化率,建立合适的模糊控制规则,得到调整PID控制器KP,KI,KD的调整值ΔkP,ΔkI,ΔkD的模糊控制规则表,然后利用计算机或微控制器通过查表和计算,完成PID控制器KP,KI,KD的在线修正,使小型ROV在不同的运动状态下不断地调整KP,KI,KD,从而达到良好的控制效果。结合实际的受控对象,模糊PID的工作原理如图2所示。
在实际的运动控制系统中,PID控制器KP,KI,KD的值是由这三个调节系数的初始值KP0,KI0,KD0和模糊控制器输出的校正量ΔkP,ΔkI,ΔkD相加得到,即PID控制器调节系数的整定公式为:
[KP=KP0+ΔkPKI=KI0+ΔkIKD=KD0+ΔkD] (7)
2.2 模糊PID控制器设计
在设计小型ROV模糊PID控制器时,主要需要考虑以下三个问题:模糊化接口、模糊控制规则建立及模糊推理和清晰化接口。
2.2.1 模糊化接口
在小型ROV定深控制中,模糊控制器的输入变量分别为深度偏差e和偏差变化率ec,输出变量分别为PID控制器的校正量ΔkP,ΔkI和ΔkD。偏差e和偏差变化率ec均是通过设定深度r与深度传感器的采样值y作差得到的基本论域(实际变化范围)中的某个精确值,需要引入量化因子ke和kec将其变成模糊论域中相应的值;而经过模糊控制器运算后输出的校正量ΔKP,ΔKI和ΔKD是模糊论域中的某个值,需要引入比例因子kP,kI和kD将其变换到基本论域中去。
假设在小型ROV的定深控制中,偏差e的基本论域为[eL,eH];语言变量E的论域定义为{-m,-m+1,…,-1,0,1,…,m-1,m},则量化因子ke如下:
[ke=2meH-eL] (8)
确定了量化因子后,偏差e与语言变量E的转换关系如下:
[E=kee-eH+eL2] (9)
当运算结果为小数时,需要将其四舍五入取整。偏差变化率ec与偏差e的转换方式相同。
同理,假设实际的校正量ΔkP的基本论域为[ΔkPL,ΔkPH],经过模糊控制器运算后输出的校正量ΔKP的论域定义为{-h,-h+1,…,-1,0,1,…,h-1,h},则比例因子kP如下:
[kP=ΔkPH-ΔkPL2h] (10)
同理可得[kI]及[kD]。
确定了比例因子后,模糊控制器输出的校正量ΔKP可以通过式(11)转换关系得到实际的校正量ΔkP。校正量ΔkI和ΔkD也可使用相同的转换方式得到。
[ΔkP=kP·ΔKP+ΔkPH+ΔkPL2] (11)
通常语言变量需要在其论域上划分若干个等级加以区分,在划分等级个数时,需要兼顾模糊控制器的简单性和控制效果。考虑深度的偏差和偏差变化率,控制器调节系数的正负性,本文将上述语言变量划分为常用的7个等级——“负大(NB)”“负中(NM)”“负小(NS)”“零(ZO)”“正小(PS)”“正中(PM)”“正大(PB)”。
2.2.2 模糊控制规则建立及模糊推理
小型ROV调整深度的偏差时,需要考虑小型ROV自身的惯性、流体水动力以及推进器反应速率的影响;而PID控制器调节系数的整定则需要考虑在定深运动不同的调节阶段,三个系数的作用和相互之间的关系。综合考虑上述因素,结合相关文献[6?9]的控制经验以及本文所设计的小型ROV自身的调节经验,对KP,KI,KD的整定要求归纳如下:
1) 在深度开始调节的瞬间,深度的偏差会比较大,为了克服小型ROV自身的惯性和水动力的阻碍,使推进器快速地输出合适的推力,应增大KP的取值;同时为了避免控制系统响应出现较大的超调,需对积分作用加以限制,通常取KI=0;另外,为了避免由于刚开始调节瞬间,深度的偏差变化率过大而可能引起微分过饱和,导致微分作用过大,超出控制变量允许的输出范围,应取较小的KD。
2) 当深度的偏差和偏差变化率为中等大小时,为减少系统的超调量,应减少KP的取值;同时在确保小型ROV能快速达到设定深度的前提下,KI和KD应取适中等偏小的值。
3) 当深度的偏差较小,即在接近设定深度时,应增大KP和KI的取值使系统的稳态误差减少;同时为了避免小型ROV在设定深度附近来回调节,并为了提高系统的抗干扰性能,当偏差变化率较小时,KD取值应该较大些;反之,KD取值应该较小些。
根据上述KP,KI,KD的整定规则,可得到校正量ΔKP,ΔKI,ΔKD的模糊控制规则表如表1所示。根据下述的模糊控制规则表,可以得到E,EC与ΔKP,ΔKI,ΔKD之间的49条模糊条件语句,应用Mamdani推理方法,可以得到这三个校正量的模糊控制子集。
2.2.3 清晰化接口
应用Mamdani推理方法推理得到的ΔKP,ΔKI,ΔKD是模糊论域上的模糊子集,需要将它们转化为基本论域中的值,才能对三个调节系数进行校正,此操作过程,称之为清晰化。清晰化的方法有很多,有最大隶属度法、中位数法和重心法等,本文主要采用重心法。
重心法是指模糊控制子集中的各个元素进行加权平均运算后的值作为模糊控制器的输出变量,然后经过比例因子(式(11))的运算,即可转化为实际的校正量。重心法的计算公式为:
[U=i=1lμ(Xi)Xii=1lμ(Xi)] (12)
式中:Xi为语言变量值;μ(Xi)为语言变量值对应的隶属度。
得到三個实际的校正量后,可根据式(7)计算出校正后的KP,KI,KD,然后经过PID控制器的运算得到最终的控制变量,输出到垂直方向推进器。式(7)中,调节系数的初始值KP0,KI0,KD0可根据传统的PID参数整定方法获得。
3 仿真结果及分析
Matlab提供模糊逻辑工具箱,该工具箱可制定模糊控制器输入变量和输出变量的隶属度函数、模糊控制规则、模糊推理方法和清晰化方法等,编辑好的模糊控制器可输出到Workspace中,然后在Simulink中搭建控制系统进行定深运动模糊PID控制仿真。小型ROV定深运动控制在Simulink中搭建的总体仿真框图见图3。
在定深模糊PID控制算法仿真中,利用“Z?N整定法”和“试凑法”可获得PID控制器三个调节系数的初始值分别为:KP0=3.78,KI0=0.01,KD0=4.85。模糊控制器中的量化因子和比例因子的大小会影响整个控制器的控制效果[10?11],经多次仿真后,量化因子确定为:kE=6,kEC= 53.5,比例因子确定为:kP=1.22,kI=0.001,kD=0.32。将传统PID控制与模糊PID控制使用相同的初始调节系数进行仿真对比,仿真结果如图4所示。 由图4可知:当深度的设定值为1 m时,模糊PID控制的超调量为7.98%,上升时间为12.60 s,调节时间为26.71 s;而传统PID控制的超调量为19.46%,上升时间为12.85 s,调节时间为41.23 s。比较这两种控制方法的仿真结果,可以看出模糊PID控制比传统PID控制在动态性能方面具有较为明显的优势。在刚开始的定深阶段,模糊PID控制能使小型ROV更快达到设定深度;在调节阶段,模糊PID能缩短调节时间;在稳态性能方面又和传统PID控制相似,具有较小的稳态误差。
4 结 语
针对小型ROV 定深运动的非线性、时变性及易受干扰等问题,将模糊控制理论和传统PID控制相结合,设计了基于模糊PID的小型ROV定深运动控制系统,对PID的参数进行实时整定,使其在较小的超调下获得较短的调节时间和良好的平稳性,同时兼备模糊控制和传统PID控制的优点,并在Simulink环境中进行仿真分析。仿真结果表明,模糊PID控制器相比于传统PID,能够有效地提高系统的响应速度,减少系统的超调量,并提高系统的抗干扰能力,更有利于小型ROV的定深运动控制。
参考文献
[1] LI Ye, LIU Jiancheng, SHEN Mingxue. Dynamics model of underwater robot motion control in 6 degrees of freedom [J]. Journal of Harbin Institute of Technology, 2005(4): 456?459.
[2] 刘泽发.观测型ROV航行控制系统设计及运动控制技术研究[D].杭州:浙江大学,2015.
[3] 陆柳延.水下机器人运动控制与路径规划研究[D].扬州:扬州大学,2013.
[4] 汪越胜,税国双.运动学与动力学[M].北京:电子工业出版社,2011.
[5] 苗燕楠.小型水下机器人的运动控制研究[D].武汉:华中科技大学,2016.
[6] 尹梦舒,冯常.基于模糊技术的水下机器人运动控制[J].微型机与应用,2015,34(17):75?77.
[7] 冯冬青,任雪梅.模糊PID在网络控制系统中的仿真研究[J].自动化仪表,2013,34(1):61?63.
[8] AKKIZIDIS I S, ROBERTS G N, RIDAO P, et al. Designing a fuzzy?like PD controller for an underwater robot [J]. Control engineering practice, 2003, 11(4): 471?480.
[9] MUSCATO G, PRESTIFLIPPO M. A fuzzy?PD for the position and attitude control of an underwater robot [C]// Emerging Technologies and Factory Automation. Catania, Italy: IEEE, 2005: 379?383.
[10] WOO Z W, CHUNG H Y, LIN J J. A PID type fuzzy controller with self?tuning scaling factors [J]. Fuzzy sets & systems, 1998, 115(2): 321?326.
[11] KAZEMIAN H B. Comparative study of a learning fuzzy PID controller and a self?tuning controller [J]. ISA transactions, 2001, 40(3): 245?253.
作者简介:綦声波(1970—),男,山东平度人,博士,教授,主要从事嵌入式系统、海洋智能仪器方面的研究工作。
尹保安(1993—),男,山东临清人,硕士研究生,主要从事海洋监测仪器方面的研究工作。
