面向对象多特征融合的水域岸线目标变化检测
2020-03-04王春林黄祚继董丹丹
张 曦,王春林,黄祚继,董丹丹
(安徽省(水利部淮河水利委员会)水利科学研究院,安徽 合肥 230001)
0 引言
目前,全面推行河长制已初见成效,为集中开展全国河湖“清四乱”行动,协助水利监管部门打好河湖管理攻坚战,需评估水域岸线管护工作的整治情况,如仅靠人力进行现场调研则耗时费力。遥感影像变化检测技术是利用同一区域多时相的遥感影像和其它辅助数据,定量地判定和分析目标对象空间分布及其变化情况的技术[1]106。将遥感影像变化检测技术应用于水域岸线监管,可客观反映重点岸线区域内的自然条件、资源现状,量化评判河长制中水域岸线治理及沿岸的生态环境变化情况,将大大减少人力和其他设备的投入,强化水利行业监管力度,有效推动河长制从“有名”到“有实”的转变,对服务河湖水域岸线常态化监测有着十分重要的意义[2-3]。
遥感影像变化检测方法主要分为以下 3 类:
1)基于像素的变化检测方法。主要是通过计算基准影像与实验图像的灰度值,利用数学模型对灰度值的变化进行建模,进而检测出变化区域,主要包括图像差值法、比值法,以及回归、主成分、变化矢量等分析法[1]106。在实际应用中阈值的确定,较多地取决于不断测试,得到合适的阈值。
2)基于特征的变化检测方法。主要是针对检测对象的数值或者结构特征,利用数学模型度量 2 组特征的相似程度,进而判断检测对象的变化情况。该类方法不是基于原始数据而是基于特征,所以在特征提取过程中不可避免地会出现信息部分丢失的情况,因此难以提供细微信息[4]。
3)面向对象的变化检测方法。主要是利用模式识别技术提取检测对象的数值或结构特征,度量 2 组特征的相似程度,进而判断检测对象的变化情况。主要包括变化向量分析比较法(CVA)[5-6]和分类后比较法(PCC)[7-8],优点主要是对不同时期的遥感数据的辐射差异值不敏感,方便确定变化类型[9]。
因为码头含有丰富的特征信息,周围环境复杂,难以确定变化向量分析中的最优阈值。为此基于面向对象的高分辨率遥感图像分析方法,提取目标对象的多类特征,采用 PCC 法,实现多源多时相的水域岸线区域内非法码头的变化检测。
1 整体思路与研究区域
1.1 整体思路
高分辨率遥感影像具有丰富的空间信息,要想提高目标变化检测的精度,需要充分挖掘并融合目标对象的多类特征信息[6]。此外,在高分辨率正射影像中,码头一般具有以下特征:
1)光谱特征。受建设材料(如水泥、柏油)及表面随意堆放杂物的影响,码头光谱具有多样性。
2)几何特征。空间形状呈现出“T”“I”“Y”等字型,坡度一般不会发生变化。
3)空间拓扑特征。码头与水相邻,一般指建立在水边的工程区域,包括装卸、辅助生产、商务信息设施等工作区域。其中,装卸作业地带包括码头前沿作业地带、仓库、相邻的基础交通设施(如铁路、道路等),这些区域的存在也影响了目标对象的提取。
本研究以利用面向对象的多尺度分割方法获取的具有“同质均一”性的目标对象为基本分析单元,通过多次试验最优分割尺度获得合适的阈值,合并相同类别的图斑,并结合码头的光谱-纹理-几何特征进行样本选择,将样本分为码头和非码头目标类。然后,融合提取的多特征信息,选用支持向量机作为分类器,提高高空间分辨率数据分类的精度。通过比较两景影像分类后的结果,得到目标对象的空间位置变化和变化强度的检测结果。相关流程图如图 1 所示。
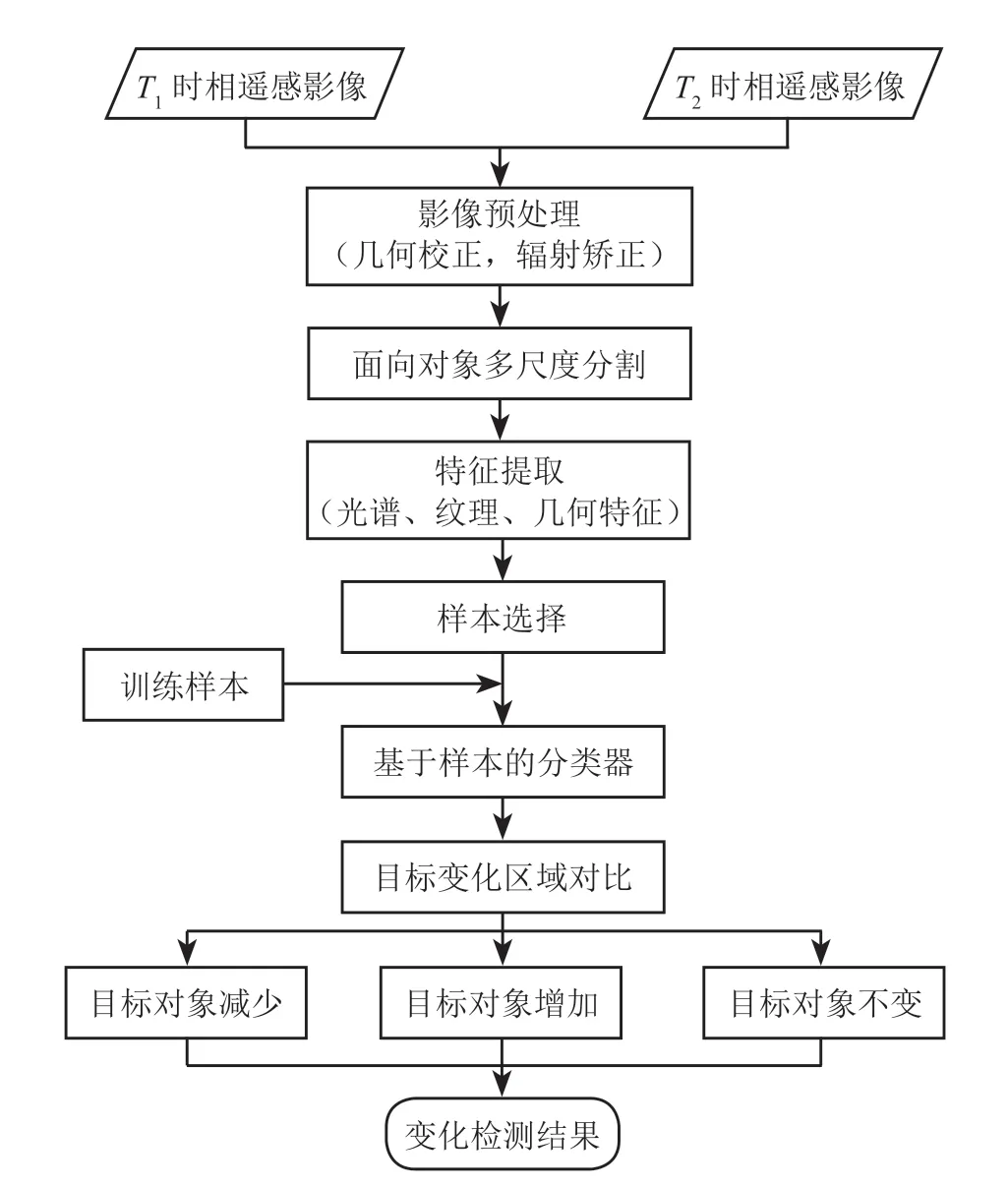
图 1 面向对象多特征融合目标变化检测流程
1.2 研究区域
研究区域选用长江安徽部分江段水域岸线。使用高分辨率卫星遥感影像的 3 个多光谱波段,影像大小为 1 379 像元×1 395 像元,各卫星影像数据如表 1 所示。T1时相为 2016 年 11 月高分 2 号拍摄的整改前影像,该区域通过人工判读码头数目为 17 座,T2时相为 2017 年同期高景 1 号拍摄的整改后影像,通过人工判读码头数目为 13 座,T1,T2时相如图 2 所示。

表 1 选用的卫星影像数据介绍
2 面向对象多特征融合变化检测
2.1 影像预处理
首先在遥感图像处理软件 ENVI 5.3 中利用Image Registration Workflow 工具,选用 T1时相原始影像作为基准影像,同时选取 T2时相原始影像中的 10 个同名点,将其配准到 T1中,使其具有标准地理信息,包含更多的重叠区域。采用直方图匹配法进行快速相对辐射矫正,保证两时相影像区域内的像元亮度值具有可对比性[10]。


图 2 多源多时相遥感影像
2.2 面向对象多尺度分割
面向对象分析软件以 eCogonition 软件为代表,核心技术是图像分割技术。其中,多尺度分割技术适用面广,还具有高效利用影像信息,分割精度高,速度快等优点[11-12]。多尺度分割是一种基于区域合并技术自下而上的方法,根据对象内部像元应具有的“同质均一”性,不同对象之间具有的异质性的特点进行分割。在软件中,异质性是由光谱和形状的权重所定义的,而形状的异质性是由光滑度和紧致度共同定义的。本研究中使用的多尺度分割参数如下:尺度参数为 20,形状参数为 0.2,颜色参数为 0.8,紧致度为 0.5,平滑度为 0.5。
该分割结果可将目标地物与水和周边的其他地物环境分割开,不同地物产生的图斑之间具有较大的异质性,T1,T2时相分割结果如图 3 所示。


图 3 面向对象多尺度分割
2.3 目标对象多特征融合
低分辨率影像中,光谱特征足以支撑目标对象的分类;但在高分辨率影像中,随着空间分辨率的提高,影像信息量也会相应地增加,使得目标对象类内同质性降低,异质性增加,致使类间可分性降低[13]。因此,通过融合目标对象的光谱、纹理及几何等特征,增大变化与未变化对象的可分性。
提取的目标对象的多种特征具体内容如下:
1)光谱特征。通过计算各个波段的光谱均值,即红、绿、蓝波段的光谱均值,直观反映目标区域所包含的光谱特征。
2)纹理特征。灰度共生矩阵可反映影像中任意两点的灰度相关性,在纹理特征提取中有着较为广泛的应用[14]。在构建共生矩阵的基础上,选用 4 个常用的纹理特征统计量,如二阶矩(Asm)、对比度(Con)、熵(Ent)和相关性(Cor),并计算目标对象的纹理特征值。
a. 二阶矩。反映图像灰度分布均匀程度和纹理粗细度,计算公式为

式中:(i,j) 表示图像中的像素点坐标;P (i,j) 表示对象中 k 个像素的归一化灰度直方图。
b. 对比度。反映影像清晰度和纹理深浅,计算公式为

c. 熵。度量影像的信息量,反映影像的复杂程度,计算公式为

d. 相关性。反映度量空间灰度共生矩阵元素在行或列方向上的相似程度,因此,相关值大小反映了图像中局部灰度相关性,计算公式为

式中:µ 表示样本灰度均值;σ 表示样本灰度标准差。
3)几何特征。码头形状多数呈现出矩形和“T”字型,具有独特的几何特征,因此,选用宽长比 R 和矩形度 Pr 表征码头的几何特征。宽长比 R 为最小外接矩形的宽度和长度之比,矩形度 Pr 为目标图像的面积和最小外接矩形的面积之比。通常,码头具有较小的宽长比 R,因此划分合适的阈值,便可以很好地提取出具有明显线性特征的区域;Pr 反映的是目标图像与矩形的近似度,目标的纤细弯曲度越大,Pr 的值越小。
在提取出多种特征后,为了减少数据冗余,提高数据可使用质量,需将所有特征归一化至(0,1]。
2.4 基于样本的分类技术
为充分利用对象的多种特征,选用高斯径向基核函数支持向量机(RBF-SVM),实现对高分辨率遥感影像的分类[15]。支持向量机是一种基于样本的监督分类器,通过在高维特征空间中依据核函数构造最优超平面即决策函数,实现二分类的方法。决策函数计算公式如下:

式中:K (xi,xj) 为核函数;(xi,yi) 表示测试集中的测试点;x 为训练后的标准化支持向量;λi为其所对应的支持向量机的系数;b 为常数项。本研究选用高斯径向基核函数,即:

式中:σ 表示样本对整个分类超平面的影响,若 σ 较大,则样本点对整个分类超平面影响距离比较远,容易被选择为支持向量;反之,若 σ 较小,样本对整个分类超平面的影响距离较近,则不容易被选择为支持向量。
具体分类步骤如下:
1)步骤 1。对每个像元分别计算出多方向的光谱-纹理-几何特征,并对特征进行归一化处理转换为 libsvm 标准格式。
2)步骤 2。选定掩膜区域,对于目标与非目标对象组,分别选择 10% 的遥感影像感兴趣区域作为训练样本。
3)步骤 3。选用高斯核函数将样本转化为核函数矩阵,并采用交叉验证的方法选择惩罚参数 C 和内核参数 γ。
4)步骤 4。利用所得到的最佳参数 C 和 γ 对训练样本进行训练,得到最优 SVM 分类器。
5)步骤 5。利用步骤 4 训练后的最优分类器对区域内的遥感影像进行分类,得到影像分类结果。
采用多类特征融合的基于样本的分类器对码头进行分类提取,图 4 为 2 个时相的码头提取结果,T1时相码头提取结果用蓝色表示,T2时相码头提取结果用绿色表示。
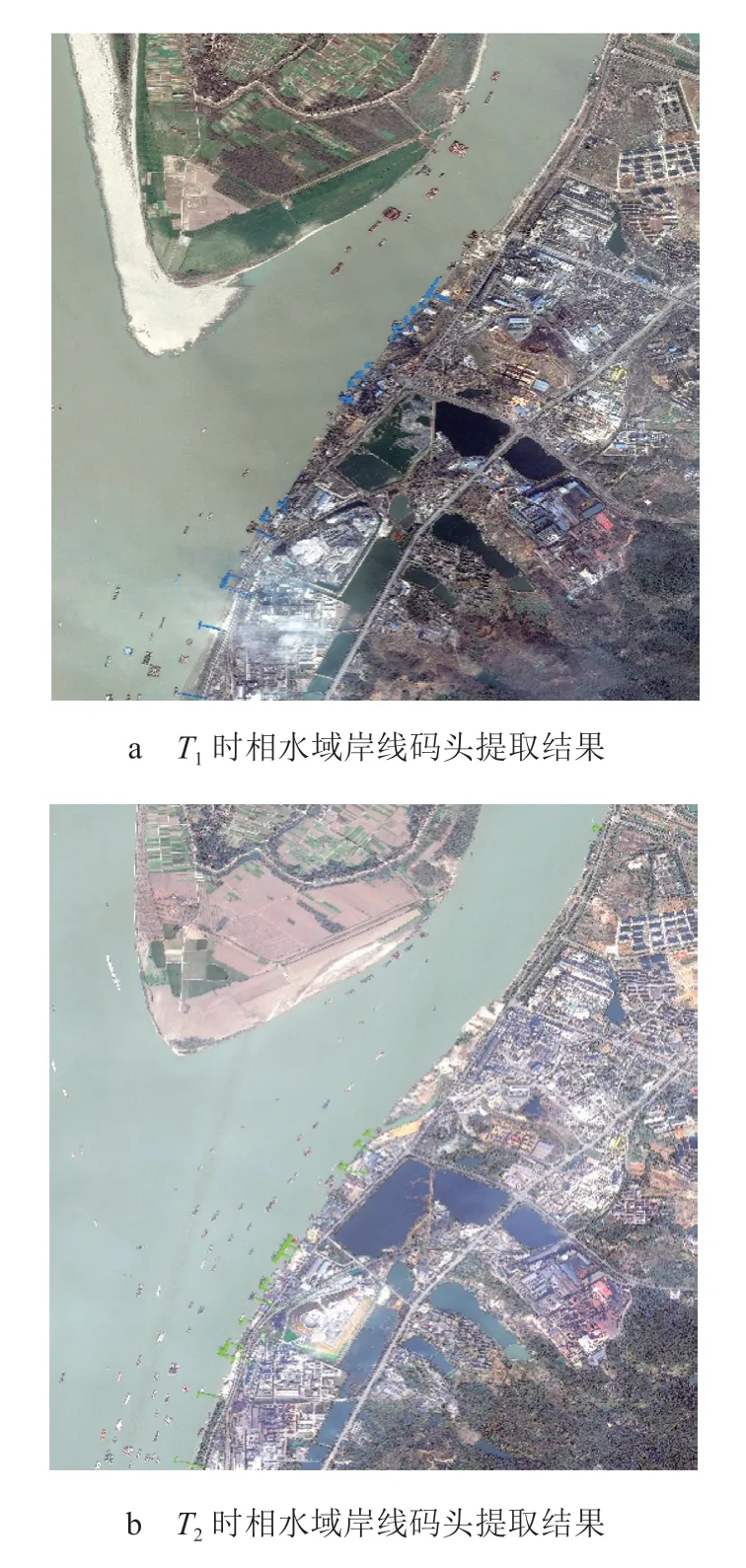
图 4 2 个时相的码头提取结果
选用目视解译的方式获取该区域内码头的真实感兴趣区域,分别对 2 个时相分类结果进行定量评价分析,具体情况如表 2 所示。
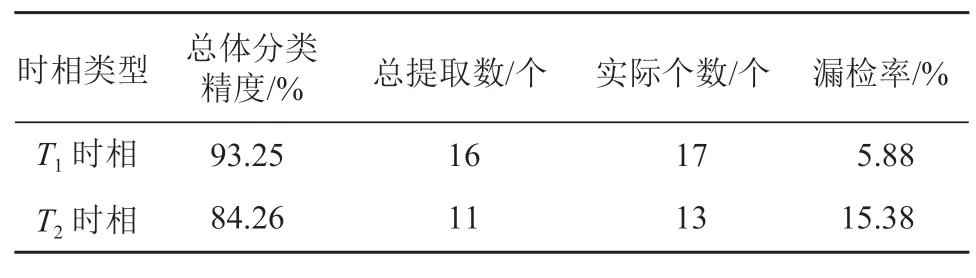
表 2 码头分类后正确性表
所提出的方法在选取的区域影像中都达到不错的分类效果,提取结果中未出现错误预警,可将码头有效地分类提取。T1,T2时相的总体分类精度分别为 93.25%,84.26%。其中,T1中有 1 座码头未被提取出来,漏检率为 5.88%,T2中有 2 座码头未被提取出来,漏检率为 15.38%,实验中未被检测出的码头如图 5 所示,红框内为未提取出的码头。主要原因是高分影像中目标对象的异质性远高于对象内部的同质性,以及周围船只等地物的干扰所致。
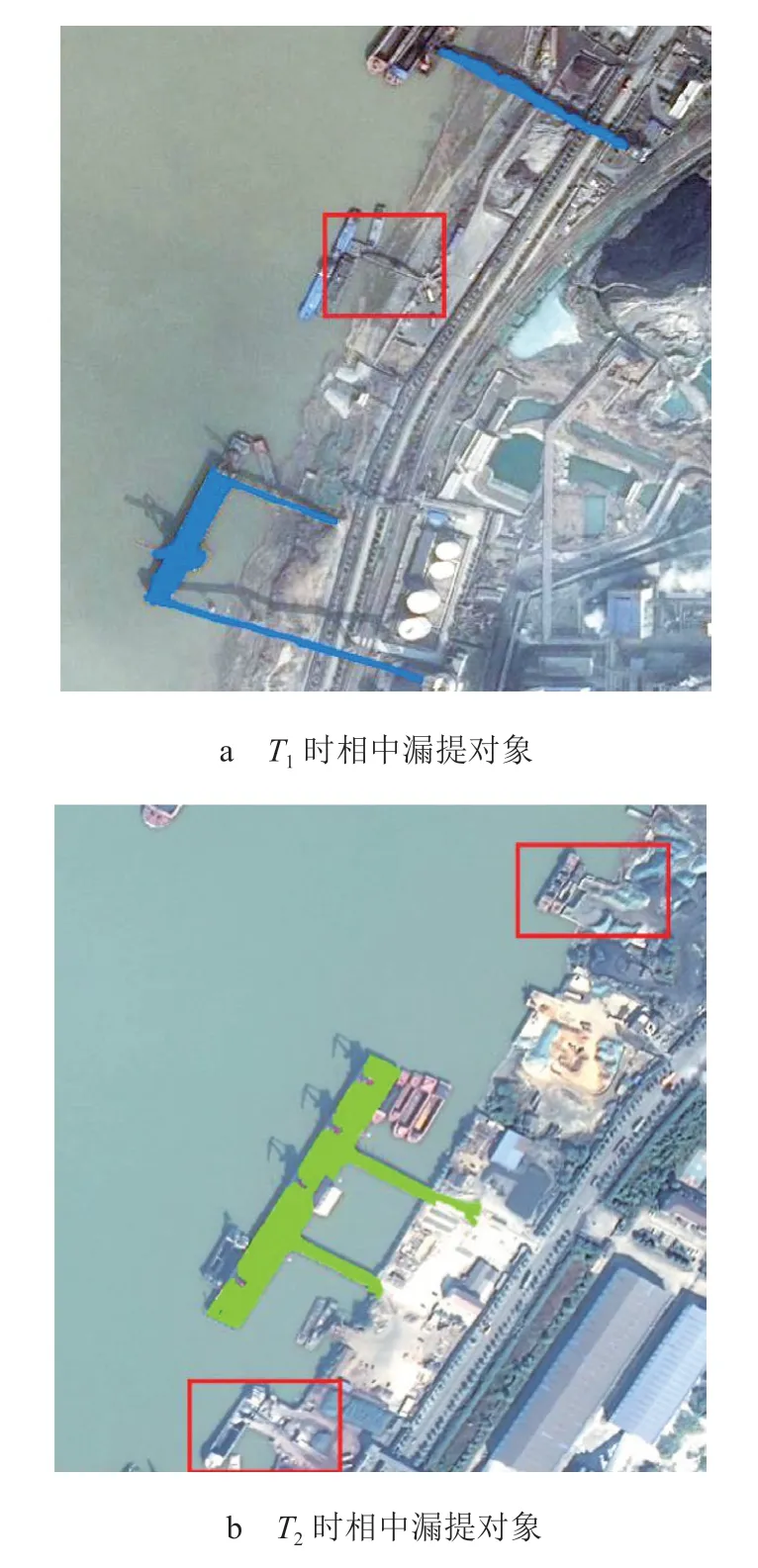
图 5 实验中未被检测出的码头
2.5 变化检测结果及分析
对 2 个时相水域岸线的码头提取结果叠加分析变化情况,具体说明如表 3 所示。

表 3 水域岸线上码头变化检测情况说明
如图 6 所示,将变化检测结果叠加于 T2时相中,因违章搭建的码头被拆除的数目为 8 座(红色表示),新增码头数目为 3 座(绿色表示),未改变的码头数目为 8 座(蓝色表示)。本研究提出的方法可有效地提取出水域岸线上的码头形态数目,尽可能地保留目标对象的完整性,并能直观地展现目标对象的变化情况。

图 6 水域岸线上码头变化检测结果
3 结语
本研究聚焦全面推行河长制任务关键技术研究应用,以及行业“强监管”的治水工作重点,针对全国河湖“清四乱”及河长制六大任务要求,了解水域空间岸线管护中的码头目标地物整治情况,研究快速准确的目标变化检测技术。
选用覆盖水域岸线多源多时相的高分辨率遥感影像作为实验区域,利用面向对象多尺度分割技术选取合适的阈值快速有效地对遥感影像进行分割,缓解了部分过分割现象,融合目标对象光谱、纹理及几何结构多种特征信息,采用支持向量机进行地物分类,并依据分类结果对比分析该区域的目标地物整治效果。实验成果表明,所提出的方法可在复杂的水域岸线环境中较准确地将水域岸线上的码头目标地物提取出来,并实现变化检测分析。该方法在两图像之间的相对辐射矫正没有依赖性,变化检测的效果依赖于样本特征的选取和分类的结果。研究成果可用于高效精确地检测水域岸线的生态环境变化情况,并衡量水域岸线治理效果,有利于强化河湖水域岸线管理保护,量化分析河长制工作成效。
后期将继续探究本研究方法对河长制中其他目标地物变化检测中的可行性,并针对漏提对象,需优化特征信息,丰富训练样本,继续深入研究多样自动分类技术,选取更优的分类器提高分类精度,拓宽本方法的适用性。
