遥感影像变化检测综述
2021-09-09任秋如杨文忠汪传建魏文钰钱芸芸
任秋如,杨文忠*,汪传建,魏文钰,钱芸芸
(1.新疆大学信息科学与工程学院,乌鲁木齐 830046;2.安徽大学互联网学院,合肥 230039)
0 引言
随着时代的发展,人们在对地球进行探索的同时发现大自然在慢慢地发生变化,造成这些变化的因素主要有两个:一个是自然变化,比如四季的交替让万物更迭、自然灾害引起地表以及自然资源的变化、板块运动使得山川河流颠倒;另一个是人类活动造成的变化,包括农、林、渔、牧、矿、工、商、交通、观光和各种工程建设使得土地利用和土地覆盖(Land Use/Land Cover,LULC)发生变化,其中人口增长与过度开发造成了一定的非自然变化甚至是对自然资源的严重破坏[1]。利用卫星遥感来观测地球,可以根据地表状态和变化信息来达到对自然资源的合理开发,从更宏观的角度来保护地球,促进人与自然的可持续发展。遥感技术在经过60年来的研究发展后,遥感影像获取技术具有多传感器、多平台、多角度的“三多”特征,获取的影像具有高空间分辨率、高时间分辨率、高光谱分辨率和高辐射分辨率的“四高”特征,通过遥感影像可以实现对地表实体和现象的变化检测,从而进一步地回答“when”“where”“what object”和“what change”的“4w”问题[2]。
变化检测是通过在不同时间观察同一对象或现象来识别其状态差异的过程[3]。自动、半自动化的变化检测已经在城市规划、土地利用/覆盖、植被变化、灾害监测、地图更新和生态环境保护等多个领域得到了广泛应用,例如,Gärtner等[4]通过检测树冠的生长变化来检测自然植被的覆盖变化,适用于发现河岸森林植被的退化,有助于检测评估濒危生态系统;Lu等[5]通过检测降雨、台风和地震引发的山体滑坡来进行灾害监测;Lin等[6]提出了一种新的时间序列变化检测方法来检测分析土地利用和土地覆盖的变化;季顺平等[7]结合全空洞卷积神经网络和GIS(Geographic Information Systems)数据的分类后检测方法对武汉市进行城市土地覆盖分类与变化检测,提出的算法成功应用于2018年武汉市城市土地覆盖GIS数据库的更新。现已有多种基于遥感的变化检测方法被提出,有些学者也对变化检测方法和技术进行了综述[1-2,7-9]。然而,通过对这些综述的总结分析可以发现,因为变化检测过程的复杂性,尚还不存在一种普遍的变化检测技术,大多都是根据特定的应用场景选择了相对合适的变化检测方法,不具有普适性和推广性。
变化检测的流程大致可以分为数据预处理、变化检测技术选择和精度评价三个阶段,如图1所示。现在国内外学者的研究大多都是针对第二阶段展开的,变化检测技术的选择是整个变化检测过程的核心,对检测结果的好坏起到重要的作用[9]。变化检测领域常用的检测方法主要是分类后变化检测[10],但是该方法的精度主要取决于分类结果的好坏,这是研究人员们一直努力解决的问题之一。随着深度学习的广泛应用,该方法渐渐地被引入到了变化检测领域中,深度学习[11]能提供一种端到端的变化检测,所以在大大简化变化检测复杂性的同时提高了检测结果的精度,受到许多研究人员的欢迎,因此近几年基于深度学习的变化检测研究层出不穷[7,12-14]。虽然变化检测技术的选择是变化检测过程中的重中之重,但是合适的预处理操作和正确的精度评价也同样必不可少,因为前者能给变化信息的提取奠定基础,后者能更直观地检验方法的性能,比较多个方法的优劣,所以这三个阶段缺一不可。
近年来,虽然变化检测领域的研究进行得如火如荼,尤其是基于深度学习的变化检测受到很多研究者的青睐,但是离实时的、自动化的变化检测要求还有一定的差距,未来的研究仍要在变化检测方法的选取、变化检测过程的确定以及变化检测结果精度的提高等方面做进一步的研究。
基于以上背景,为了较全面地对过去几十年的遥感影像变化检测研究进行总结以及探讨存在的问题和未来的发展,本文将从变化检测的发展历程、变化检测流程、挑战与发展这三个方面展开综述。首先变化检测的发展历程方面包括遥感卫星的发展和变化检测的发展阶段这两个部分;其次变化检测流程包括数据选择及预处理、变化检测技术、后处理及精度评价,其中变化检测技术主要包含了4种分析单元、4种比较方法及是否考虑先验知识;最后提出了在变化检测领域现存的一些挑战以及变化检测未来的发展方向。本文旨在对变化检测领域有一个较全面的回顾,在多人研究总结的基础上进行梳理,能在以后的研究发展中起到一定的作用。
1 变化检测的发展历程
从20世纪70年代开始,国内外研究学者们就开始对基于遥感影像的变化检测进行了各种研究,1977年Weismiller等[15]提出了图像差分方法并对沿海地区进行了变化检测,开启了基于遥感变化检测的时代。在变化检测这四十多年来的发展中,各国政府发射了多颗卫星,扩充了遥感影像的数据源,同时学者们也提出了非常多的影像处理方法、检测算法,为变化检测这一研究领域提供了有力的技术支持。现如今,太多的卫星数据和方法让研究人员眼花缭乱,因此,本章将梳理一下变化检测的发展历程,给出变化检测这个领域一个比较清楚的认识。
1.1 遥感卫星发展
根据不同的遥感卫星数据进行的实验会有所不同,所以本文总结了可用于变化检测的主要遥感卫星,如图2所示。美国在遥感卫星领域一直处于领先地位,早在1961年就发射了世界上第一颗气象卫星,拉开了遥感卫星发展的序幕。之后在1972年发射了第一颗陆地观测卫星Landsat-1,提供了中等分辨率以及长时间序列遥感数据,1982年Landsat-4卫星发射,将分辨率提高到了30 m。法国于1986年发射了SPOT-1(Systeme Probatoire d’Observation de la Terre)遥感卫星,成功将空间分辨率提高到了10 m;1998年发射的SPOT-4卫星加入了中红外谱段,使得能够分类识别植物并且能进行冰雪探测。随后一年,美国于九月底成功发射IKONOS卫星,成为世界上第一颗分辨率优于1 m的商业遥感卫星,为军民用户提供高分辨率遥感影像。当高分辨率遥感影像为陆地观测带来了巨大便利后,各国研究者都想获得更加精细的遥感影像。美国于2001年成功发射了QuickBird卫星,再次将分辨率更新到了亚米级。随后越来越多的亚米级遥感卫星成功升天,如2007年发射的WorldView-1卫星分辨率为0.5 m;2008年发射的GeoEye卫星分辨率为0.41 m;2014年发射的WorldView-3卫星分辨率为0.31 m;2015年发射的北京二号卫星分辨率为0.8 m,是中国首颗亚米级遥感卫星。近年来除了用这些常用的遥感卫星进行变化检测,也有学者用夜间灯光遥感数据检测城市的变化[16],以及将夜间遥感灯光数据与普通遥感数据相结合的方法来进行城镇的扩张检测[17]。除此之外,利用无人机来进行变化检测也是一个流行的方法[18]。

图2 遥感卫星发展Fig.2 Development of remote sensing satellite
1.2 变化检测发展阶段
本文在多位研究学者研究、总结[19]的基础上,进一步完善了变化检测的发展历程,主要包括变化检测萌芽期、变化检测的兴起、变化检测高潮期和变化检测浪潮期这四个阶段。
1)第一阶段(1970—1989):变化检测萌芽期。主要是基于像素的变化检测,一是因为这一阶段各国的遥感影像都属于中低分辨率,像素较为模糊,很难建立图像对象;二是操作简单,通过对像素单元进行简单的代数运算就能得到差异图,再选取阈值就能得到相应的变化结果图。这一阶段主要的变化检测方法有代数法[20]、变换法[21-22]、分类法[23]等。
2)第二阶段(1990—1999):变化检测的兴起。先经过分类与回归树[24-25]、反向传播算法[26-27]、卷积神经网络[13,28]这些机器学习方法的提出,而后有支持向量机[29-31]、AdaBoost算法[32]、循环神经网络[14]和长短期记忆网络等方法的日趋成熟与应用,使得基于机器学习的变化检测研究发展十分迅速。不再是进行简单的层运算,而是能够经过更严密的数学计算来实现更好效果的变化检测结果,进一步提高遥感影像变化检测的精度。除了机器学习的推动之外,地理信息系统(Geographic Information System,GIS)技术[33]的成熟发展以及一些混合类方法[34]的提出都促进着遥感影像变化检测迈向新的台阶。
3)第三阶段(2000—2009):变化检测的高潮。在这一时期,高分辨率以及亚米级商业遥感卫星的成功发射和迅速发展,让遥感影像的空间分辨率越来越高,基于此,面向对象的图像分析(Object Based Image Analysis,OBIA)开始被引入到了变化检测领域中。基于像素的各种方法也都对应着引入到了基于对象的变化检测中,得到的变化图和精度都取得了不错的结果[35-36]。除此之外,将基于像素与基于对象的方法相结合来充分发挥两者各自的优点,也得到了更好的实验结果[37-38]。
4)第四阶段(2010—至今):变化检测的浪潮。随着大数据信息技术的发展,以深度神经网络为代表的人工智能进入了蓬勃发展期,尤其是在2012年Hinton参加ImageNet比赛中提出AlexNet网络一举夺冠后,深度学习开始兴起甚至爆发。之后深度学习方法也被迅速地引入到了基于遥感的变化检测中来,包括深度信念网络[39]、卷积神经网络[13,28]、循环神经网络[14]、卷积自编码[40]等方法。
2 变化检测流程
经过多年的研究,各种变化检测流程被提出,比如,韩闪闪等[41]把面向对象的土地利用变化检测过程分为建立多边形对象、影像分类、分类结果类别比较得到变化检测图像这三部分;Jabari等[42]认为变化检测过程一般分为建立双时相图像间的空间关系、指定变化检测的元素、指示变化这三个步骤;顾炼等[43]将变化检测流程分为数据预处理、模型训练和预测结果三个部分。但是总体来说,变化检测的流程大致分为数据的预处理、变化检测技术选择和精度评价这三个部分。
2.1 数据选择及预处理
2.1.1 数据选择
遥感影像的获取是进行变化检测的首要任务,如1.1节所述,随着遥感卫星的发展,数据源逐年增加,除了从遥感卫星能够获得的光学影像和SAR(Synthetic Aperture Radar)影像之外,还可通过无人机采集到影像以及GIS采集、存储栅格数据和矢量数据。各数据源优缺点及适用场景如表1所示。

表1 各数据源优缺点及适用场景Tab.1 Advantages and disadvantages of data sources and their applicable scenarios
首先获取的遥感影像要尽可能地没有云雾遮挡,在选择图像时尽量选择云量为0%或者接近于0%,这样才能更易于识别地表状态。其次多时相遥感影像变化检测因为需要同一地点的两幅或者多幅不同时间的遥感影像数据,这就要求在获取数据时要考虑季节、作物生长规律、天气以及光照等因素,最好选择不同年份在同一季度甚至同一月份的遥感影像,这样能在一定程度上减少植被以及作物因生长更替所引起的伪变化。最后对于时间序列的遥感影像变化检测来说,采集的遥感数据需覆盖研究对象生长或变化规律的所有时间,比如对于作物的变化检测一般需要采集不同季节同一地区的遥感影像,对于城市的扩张检测可能需要几年甚至十几年的遥感影像。从数量上来说,多时相遥感影像变化检测一般需要两张到十几张遥感影像,而基于时间序列的遥感影像往往需要十几张甚至几十张遥感影像。
2.1.2 数据预处理
因为不同的遥感卫星存在一定的差异,即使是同一传感器获得的遥感影像也有可能会出现几何畸变,所以需要一定的预处理,主要包括:配准、辐射校正、几何校正等,如图3所示。

图3 数据预处理Fig.3 Data preprocessing
配准(Registration)是指对同一地理位置在不同时间通过不同波段、不同传感器的成像手段得到的多个遥感影像进行地理坐标匹配的操作。遥感影像的精确配准是变化检测实现的基础,配准误差的存在会使得在变化检测过程中出现难以消除的伪变化,影响变化检测的精度,配准误差也是整个变化检测过程中的一个主要误差来源[44]。尤其是随着遥感影像空间分辨率的提高,从不同观测角度得到的高分辨率图像之间的误差消除变得更加具有挑战性。配准方式包括相对配准和绝对配准。两者的区别在于参考物不同,前者是选择特定的遥感图像作为参考,而后者是选择固定的网格坐标系。
配准算法可分为基于区域的配准算法和基于特征的配准算法。基于区域的配准利用遥感影像像素的灰度信息进行图像配准。处理方式有空域法(互相关法、最大互信息法、序贯相似检测方法和极大似然匹配法等)和频域法(基于快速傅里叶变换的相位相关法和小波变化法)[45]。基于特征的配准通过图像对中的一些局部特征建立匹配关系,从而进行图像匹配。常见的特征包括点、线、面三种。点特征主要是指遥感影像中道路、河流或者建筑的拐点、交叉点等,基于点的特征提取算法包括SUSAN(Smallest Univalue Segment Assimilating Nucleus)算子、Hannah算子、Harris算子、Moravec算子、Hog算子、SIFT(Scale Invariant Feature Transform)算子和SURF(Speeded Up Robust Features)算子等[46]。线特征主要是指遥感影像中的一些边界信息,比如道路、海岸线,基于线的特征提取算法有时域边缘检测方法(梯度算子法、直方图法、Canny算子法和Hough变换法等)和变换域边缘检测法(快速傅里叶变换和小波变换等)[45]。面特征主要是指遥感影像中的大面积场景,比如森林、水域等,基于面的特征主要是通过光谱的差异性进行识别,再通过相应的图像分割法来提取面特征,常用的图像分割法有形态学分割法和动态阈值技术分割法等[45]。
辐射校正是数据预处理中的一个重要步骤,它主要解决的是由于不同成像条件(太阳角度、成像时间、成像角度和大气条件等)造成同一区域的光谱特征出现的差异,这一差异会导致变化检测时出现伪变化。遥感影像的辐射校正可分为绝对辐射校正和相对辐射校正。绝对辐射校正是指将遥感影像像元亮度值转化为地表反射率,常见的模型有FLAASH(Fast Line-of-sight Atmospheric Analysis of Spectral Hypercubes)校正模型、BRDF(Bidirectional Reflectance Distribution Function)校正模型、地形辐射校正模型。由于绝对辐射校正需要精确的参数与大量的成像,都比较难以获取,所以易于计算的相对辐射校正更加受到关注。相对辐射校正是指将一幅影像作为参考基准,对目标影像的辐射值进行校正。相对辐射校正包括线性方法和非线性方法。线性方法假设多时相遥感影像之间的辐射值是线性相关的,但是在真实的地表状态下,由于多传感器获得的遥感影像辐射值间往往并不满足线性关系,于是常常通过伪不变特征点(Pseudo-Invariant Feature,PIF)来进行同源或者异源传感器之间得到的影像间辐射值的归一化[47]。非线性方法可以更好地解决影像间辐射值非线性的问题,常用的非线性方法是直方图匹配法(Histogram Matching,HM),该方法可以很好地统一影像间的色调,能较好地解决由于不同成像条件造成的色温差异问题[48]。
几何校正是在遥感影像发生几何位置、像元大小、方位与地面真实对应不一致等几何畸变时进行的校正。包括系统校正和精确校正,系统校正是对传感器自身的比例尺、歪斜、中心移动等内部畸变所引起的误差进行校正,可通过比例尺系数、平行移动等方法解决;精校正是对地形起伏、地球曲率等外部畸变所引起的误差进行校正,主要方法有地面控制点和几何校正模型[49]。
2.2 变化检测技术
变化检测技术的选择是变化检测过程的核心,在变化检测发展的这几十年中,国内外学者提出了非常多的方法,在变化检测结果也越来越好的同时变化检测的方法与方法之间也出现了一些交叉与重叠,有许多学者对此进行了整合综述[1-2,7-9],旨在建立一个完善的变化检测方法的分类体系。本文在多位研究者对于变化检测方法总结的基础上,对遥感影像变化检测方法的分类体系进行整理与总结,从分析单元、比较方法、是否考虑先验知识三个部分详细阐述变化检测方法的研究现状。
2.2.1 分析单元
根据分析粒度的大小不同,变化检测的分析单元主要可以分为三种,即像素、对象和场景;除此之外,还可将矢量多边形作为变化检测的分析单元。由于上述提到的分析单元各有其独特的优点,所以也有很多学者将其进行混合使用,充分发挥各自的优点,使得变化检测结果更加精准,如表2所示。
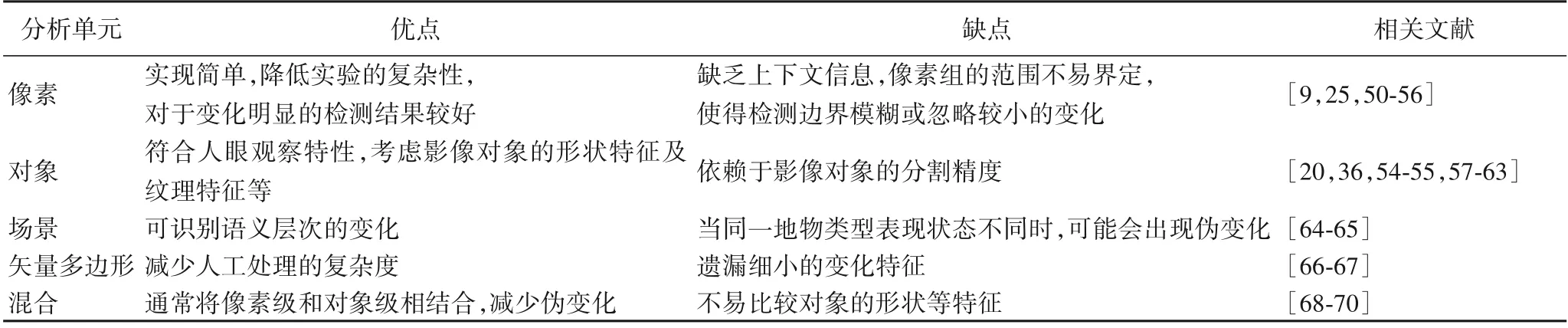
表2 分析单元分析及相关文献Tab.2 Analysis unit analysis and related literatures
1)像素。
像素是遥感影像的基本单元,在变化检测初期都是对遥感像素进行变化检测分析,即便是经过几十年的研究发展,现在仍有很多变化检测的实验是基于像素来实现的。例如张晗等[50]通过分形对数比和多尺度分析对SAR图像进行像素级变化检测;Koller等[51]开发了一种半自动的组合方法,通过像素来量化森林砍伐,将森林采伐状态分为了火灾类和非火灾类;Al Rawashdeh[52]通过逐像素差分变化检测的方法对新建成的灌溉区进行识别及评估。使用像素作为分析单元最大的优点就是操作简单,可通过比值或者差值这种简单的算术运算来进行变化检测。将像素作为分析单元比较适合用于对大面积区域的变化检测,比如水体、森林、植被覆盖的变化,在这种情况下光谱差异、色调变化都比较明显,不用考虑每个像素与像素之间的关系,降低了实验的复杂性。
像素作为变化检测的分析单元也存在着一些缺点,当应用场景是小面积区域时,比如常见的建筑物的新建与拆除,通过像素进行变化检测就会产生许多虚假的、存在噪声的像素点[53],这主要是由于光谱的可变性和图像的配准误差造成的。特别是应用在高分辨率遥感影像时,基于像素的变化检测渐渐变得不太合适[54-55]。
基于单个像素点进行变化检测的局限性,提出了像素组的概念,或者说是一个移动窗口在图像上圈出N×N大小的图像块,Tewkesbury等[9]将之称为Kernel,它包含了选定的中心像素点以及该点周围的像素信息,充分考虑了像素的上下文信息。Kernel通过利用像素的局部邻域,对像素的变化进行统计解释,从而滤除噪声,识别出真实的变化。尤其是对高分辨率遥感影像的变化检测有较好的应用,例如Im等[25]提出了一种基于邻域相关图像逻辑的变化检测模型,通过对应数据集之间的相关性确定变化位置,并通过邻域的上下文信息得到变化值;Gao等[56]提出了一种基于邻域比(Neighborhoodbased Ratio,NR)和极限学习机的SAR影像变化检测方法,该方法利用NR算子得到感兴趣的变化像素,然后生成以这些像素为中心的图像块。尽管Kernel考虑到了图像的局部邻域,但是因为N值的选取会影响检测的效果,比如N值选择过大可能会使得模糊边界,选择过小可能会过滤一些较小的变化。
2)对象。
在Hay等[57]提出影像对象的概念后,基于对象的变化检测得到了快速的发展[36,55,58-59]。通过图像对象的方式进行变化检测,更加接近于人眼进行识别的过程,也有学者通过实验比较得出了基于对象的变化检测结果要优于基于像素的变化检测结果[20,54,60]。根据使用方式的不同,可将对象作为分析单元细分为图像对象覆盖、图像对象比较和多时相图像对象三种分析单元。
图像对象覆盖是三个分析单元中最简单的一种,首先对一幅遥感影像进行分割,然后简单地覆盖到另一幅影像上,通过该操作能形成一个比较的空间框架。该方法将已得到的对象覆盖到新的遥感影像上,叠加之后在进行分割得到变化检测结果,很好地解决了像素作为分析单元时N值固定的局限性,可以对比对象的形状、长度或者一些纹理特征来检测变化。例如,Comber等[61]先对一幅影像进行分类得到分类对象,然后覆盖到另一幅基于像素的分类结果上,通过专家知识来识别分类错误中正确的变化;但是这些几何特征只反映了一个影像的属性,没有考虑到多个影像的属性间可能存在的联系。
图像对象比较不再只是对单幅影像的分割,而是对参与变化检测过程的两幅或者多幅影像都进行分割,然后再通过位置坐标对应进行对象间的比较来判断对象间是否发生了变化。Listner等[62]提出了两种比较方法:一是直接对象比较,将一个对象赋予所有重叠对象的加权和;二是交集对应,在两个对象的交集中直接比较对象的属性,第二种方法在分类后变化中使用得较多。图像对象比较的好处是可以比较所有影像对象的属性,比如面积、大小或类标签等。例如,Desclée等[36]通过区域合并的技术对多幅遥感影像进行单次分割,描绘出具有反射率差异统计特征的对象,并通过异常值将相应的对象标记为变化。但是对象的分割不是绝对精准的,在2.1节的预处理中提到,遥感影像的获取过程中会存在成像角度、大气条件、光照等因素的影响导致同一地区不同影像的光谱变异,这就会使得分割也存在高度可变性。
多时相图像对象将多时相遥感影像叠加再进行对象的分割,相比前两种方法,多时相图像对象考虑到了所有的影像,因此能够充分地利用影像信息,在时间序列遥感影像变化检测中使用广泛。例如,胡永月等[63]通过变化矢量分析的方法对三种基于对象的分割模型得到的变化目标进行变化检测分析,实验结果表明将两个时间数据叠加作为一个整体进行分割得到的总体精度和Kappa系数都是最高的。但是多时相图像对象易受到配准误差的影响,而且多时相图像对象的大小和形状存在异质性,分割时易出现太小以及边界模糊的对象。
3)场景。
以场景作为变化检测的分析单元,需要在多时相遥感影像或时间序列遥感影像中挖掘真实地表状态变化的规律,与学习到的规律不相符的就存在发生某种变化的可能性。场景级的分析单元主要应用在语义层次的变化分析中,即地表覆盖类型的转变(From-to),不再是仅仅关注于地表状态是否发生变化(Change/Un-change)的问题上。同时该方法对于城市扩张的检测或城市规划等方面能提供很好的基础。例如,Wu等[64]提出了一种基于核的慢特征分析(Kernel Slow Feature Analysis,KSFA)和后分类融合的场景变化检测方法,将独立的场景分类与场景变化检测相结合,准确地判断场景变化,识别过渡类型;Du等[65]提出了一种潜在狄利克雷分配(Latent Dirichlet Allocation,LDA)和 多 元 变 化 检 测(Multivariate Alteration Detection,MAD)进行无监督场景变化检测的方法,首先将场景用视觉词袋模型表示,然后利用LDA进行特征降维,最后通过MAD方法对多时间图像场景的语义变化进行检测,实验结果表明该方法能很好地实现无监督场景的变化检测。但是遥感影像中包含了大量的地物类型,尤其是高分辨率影像的普及,地物细分程度提高,同时同一地物类型也有可能表现出不同的状态,这些都给语义层分析带来了挑战。
4)矢量多边形。
通过现有的矢量数据覆盖遥感影像,得到两个时期遥感影像的影像像斑以及相应的类标签,可通过类标签比较发现对应像斑的变化,即矢量多边形内的变化类型。这种方法利用现有数据,使得变化检测自动化程度提高,在一定程度上减少繁重的人工处理。例如,景奉广[66]将矢量数据与遥感影像相结合,利用矢量边界能快速地提取栅格数据并且能快速地使遥感影像分割图矢量化最后还生成新的矢量数据;李亮等[67]提出一种基于像斑异质度的矢量图与遥感影像变化检测方法,通过比较像斑异质度与矢量图所在时期对应类别的异质度阈值,实现像斑的变化/未变化判别。但是实际的矢量多边形的比例与真实的变化区域的比例可能存在一些差异,可能会漏掉一些细小的变化特征。
5)混合。
上述分析单元都有各自的优点及不足,在变化检测过程中,根据不同的情况,可以对这些分析单元进行组合,来逐步地凸显变化信息。将像素和对象进行结合是一种常用的方法,因为像素能够检测到影像中较小的变化,而对象能宏观地进行变化分析,将两者适当的结合就能发现不同大小的变化图斑。例如,冯文卿等[68]提出一种联合像素级和对象级的变化检测框架,这种新框架能有效地结合两个方法的优势,提高在高分辨率遥感影像变化检测过程中的适用性;Xiao等[69]提出了一种结合像素级和对象级的识别高分辨率遥感影像建成区变化检测的新框架,实验结果表明提出的新框架具有一定的应用潜力;Gamba等[70]将特征级和像素级的变化检测方法相结合,通过提取、比较多幅SAR影像中的线性特征,识别出基于像素的变化。
2.2.2 比较方法
根据变化检测的策略不同,可以将变化检测的比较方法分为代数运算法、分类法、变换法、深度学习法以及将多种方法进行组合的混合方法,如表3所示。

表3 比较方法分析及相关文献Tab.3 Comparison method analysis and related literatures
1)代数运算法。
通过减法[20]、除法[50]等简单的代数运算方法对双时相遥感影像对应波段进行处理,得到相应的差异图,再通过利用阈值(自适应选择或手动确定)对差异图进行分割得到最后的变化检测结果。这种代数运算的方法简单,能够很好地显示出影像中变化迅速的区域。最早使用的代数法是影像差值法,将双时相影像的波段对应相减来得到差异图,这种方法非常简单但是只能显示变化、未变化信息。变化向量分析(Change Vector Analysis,CVA)方法是对影像差值法的扩展,可以利用多个波段的信息得到具有长度和方向的变化向量,向量的长度表示变化的强度,向量的方向表示变化的类型。例如Li等[71]提出了一种基于对象的CVA方法,该方法通过不同波段的直方图距离建立对象的变化矢量,通过对象变化矢量的大小来测量对象的异质性,可以很好地应用于高分辨率遥感影像的变化检测中。
影像比值法也是常用的方法之一,它与差值法的不同在于它使用的是除法运算获得差异图。此外还有很多代数运算法[72],比如波段回归法、相关系数法、内积分析法、融合法等。通过以上方法得到差异图后还有一个重要的步骤就是阈值的选定,这也是变化检测的研究热点之一。最常用的阈值方法是非参数化方法[73-74],能很好地处理遥感影像数据间的非线性关系,同时自适应的阈值分割(自动、半自动)以及多阈值分割也是较为常用的方法。
2)分类法。
分类法可以发现双时相或多时相影像变化的类型(Fromto),主要包括分类后变化法和直接分类法,其中分类后变化法更为常用。
分类后变化检测方法是变化检测领域应用非常广泛的一种方法,首先对参与变化检测的遥感影像进行分类,获得各自的分类影像,然后将这些分类影像根据对应位置进行比较,得到最后的变化检测结果图,其中包含了变化的位置以及变化的类型。例如,唐朴谦等[23]在基于像素比值法确定变化范围的基础上,通过基于对象的分类后比较的方法确定分类图斑的变化类型;Peiman等[75]对多时相Landsat遥感影像进行变化检测,通过分类后变化检测的方法确定变化信息、变化位置,最后给出变化类型。这种方法不用挖掘影像间对应的关系,只需要分别对各个影像进行分类,但是数据集中遥感影像的数量越多,其中存在的分类类别也就越多,需要一个分类器能识别出所有的地表覆盖类型也是一大难题,因此通过该方法得到的变化检测结果的精度也往往与分类结果的精度相关,所以提高遥感影像的分类精度也是一大研究热点。
直接分类法将多个时相的遥感影像进行叠加再根据变化类型进行分类,该方法不用对每个遥感影像进行分类操作,减轻了一定的工作量并且使得变化检测精度不再依赖于对地表覆盖类型的分类精度。直接分类法在基于时间序列的遥感影像分类中具有一定的优势,能够发现隐藏在复杂模式中的变化信息。例如,Pu等[76]利用直接多时相图像分类的方法对内华达拉夫洛克研究区进行入侵物种的变化检测,并且比较了基于人工神经网络和LDA两种分类器的性能,结果表明人工神经网络的性能要优于LDA。但是由于地物类型种类的多样性,想要获得具有全部变化类型的训练集是非常困难的,这也使得在实际的应用中无法进行推广。
3)变换法。
影像变换法通过对数据信息进行统计及转换的方法来抑制相关信息和突出变化区域。主成分分析(Principal Component Analysis,PCA)法和多元变化检测(Multivariate Alteration Detection,MAD)法是最常用的影像变换法。主成分分析法利用降维的方式将多个特征用比较少的几个特征来表示。例如,黄维等[22]分别对两期Landsat遥感影像进行主成分分析,将得到的前三个主成分再进行变化向量分析,得到差异图后通过两种阈值法得到变化图。
传统的主成分分析方法是对两个时期的遥感影像都进行主成分分析变化,然后用第一主成分来做差值运算;差异主成分是先进行差值运算得到差异图再进行PCA变化;联合主成分分析法将影像叠加再进行PCA变化。多元变化检测法[77]利用两个时期的遥感影像的线性组合的差值来检测变化,这种方法在高分辨率遥感影像中能很好地突出变化对象。但是这种变换的方法可能会将与变化有关的特征遗漏或隐藏在大量的变换特征中。除了这两个常用的方法外,基于影像变换的方法还包括影像回归法、正交变换法[78]、典型相关分析法[79]、缨帽变换法[80](适用于Landsat遥感影像)等。
4)深度学习法。
近几年,深度学习的发展十分迅速,因为深度学习具有端到端的网络结构在遥感影像变化检测领域得到广泛的应用。基于深度学习的遥感影像变化检测方法能直接从双时相或多时相甚至时间序列遥感影像中学习到变化特征,通过变化特征对影像进行分割最终得到变化图,而且学习到的特征具有很好的鲁棒性。相比传统的变化检测方法,深度学习方法能消除检测结果对差异图的依赖影响,能处理多个传感器获取的遥感数据,具有很强的适用性。现在有许多基于深度学习的变化检测方法被提出,包括卷积神经网络、深度信念网络、递归神经网络、堆栈自编码网络、深度神经网络等;还有许多基于以上方法进行的改进,进一步提高变化检测结果精度,例如,顾炼等[43]将FlowNet中的细化和U-Net相结合,提出了FlowS-Unet网络,能实时检测高分辨率影像中的建筑的新建与拆除变化;Huang等[81]提出了一种基于张量和深度学习的多光谱遥感图像变化检测方法,具有较好的变化检测精度和自动化水平;Li等[82]提出了基于SAR影像变化检测的半监督深度非光滑非负矩阵分解(nonsmooth Nonnegative Matrix Factorization,nsNMF)网络,在4对SAR影像的实验结果表明,该网络具有较好的检测效果。
5)混合。
可通过将多种比较方法进行组合的方式来增强对遥感影像变化信息的敏感性。常用的一种方式是用代数运算的方法先识别出遥感影像中发生变化的像素,通过对变化特征的学习来对遥感影像进行分类得到变化类型。Lu等[5]首次将归一化植被指数、主成分分析、独立成分分析和马尔可夫随机场相结合,并通过改进提出了基于变化检测的马尔可夫随机场(Change Detection-based Markov Random Field,CDMRF)方法,用于多传感器数据的滑坡变化检测。
2.2.3 先验知识
考虑到变化检测过程中是否使用先验知识,可以将变化检测方法分为监督、无监督以及半监督的检测方法。基于监督的方法[26]通过先验信息或者专家知识对变化信息进行分类,有很好的知识基础,但同时这些知识的建立需要大量的人工处理以及花费很高的成本,如果这些知识的可靠性不够也会影响变化检测的结果。非监督的变化检测方法[37,83]不用花费时间和成本来制定规则,但是需要大量的数据样本使得能够从中学到所有的变化特征。为了有效解决以上两种方法带来的问题,有研究人员提出用半监督或者结合半监督的方法来进行变化分类的研究,比如,Bovolo等[30]通过一个二元的半监督支持向量机来逐步地确定变化与未变化像素边界,在原始的多时相特征空间中提取变化信息进行变化检测。
2.3 后处理及精度评价
后处理是在预处理的遥感影像经过变化检测方法处理得到变化图后进行的操作,能进一步地减小变化检测过程中出现的误差,比如孤立点、空洞等噪声。有很多实验结果都表明了后处理能提高变化检测的精度,例如顾炼等[43]使用了膨胀、腐蚀、孔洞填充的后处理操作细化预测结果;王志有等[84]通过主成分分析和HIS(Hue,Intensity,Saturation)模型计算阴影指数来去除阴影,用基于对象的方法进行去噪增强。常用的后处理操作主要包括基于形态学处理的方法、基于滤波处理的方法、基于区域生长的方法。
精度评价是对整个变化检测过程的总结与分析,通过精度评价能直观地看到变化检测模型的性能[85]。误差矩阵和Kappa系数是变化检测领域中最为常用的精度评价方法[86-87]。根据变化检测的目标不同可以将精度评价分为简单误差矩阵和分类误差矩阵,简单误差矩阵对变化和未变化的变化检测结果进行精度评价,分类的误差矩阵是对变化类型的变化检测结果进行精度评价。除了误差矩阵,还可以用ROC(Receiver Operating Characteristic)曲线来评价变化检测结果的性能,该方法通过检测率和误检率来画一条ROC曲线,曲线越靠近左上方表示检测率越高。在ROC曲线下方的面积称为AUC(Area Under Curve),面积大小越接近1表示检测效果越好[88]。
3 面临的挑战及未来的发展
基于遥感影像的变化检测如今发展得十分迅速,但是离最终的自动化的、精准的变化检测目标还是有一定的差距。在变化检测过程的每一个阶段中都有需要进一步提高的地方,比如预处理阶段需要消除配准误差、变化检测方法还不能精准地发现所有变化、后处理阶段需要能消除变化结果中存在的噪声等。变化检测主要存在的挑战有以下几点,并对应提出了自己的思考来尝试解决这些问题。
一是遥感影像的质量需要进一步提高。现在遥感影像的分辨率虽然越来越高,地物状态变得越来越清楚,但也由于分辨率的提高,使得地物的阴影变得更清楚。在获取影像时也会因为大气条件的影响出现云遮挡,使得一些地物信息缺失,不便于进行变化检测。可以通过多源数据相互结合的方法[5]来扩大影像数据的获取范围。比如对于同源传感器来说,由于云遮挡或者影像缺失无法得到某一时段的遥感影像,在这种情况下可以通过多源传感器获取这一时期的影像数据。
二是在预处理过程中,影像之间的配准误差和光谱差异仍需解决,并且对于需要拼接的图像,影像的镶嵌与裁剪效果需要进一步提高。随着一代代遥感卫星的升级,运用一定的算法使其采集的影像具有相同的亮度或者渐变亮度信息,使得两幅影像之间的拼接处过渡自然;同时还可建立统一的地理参考系,这样在同源甚至多源遥感卫星下采集的影像间也不会有很大的配准误差。
三是关于遥感影像变化检测方法,现在还没有一种能适用于所有场景的高效的变化检测方法,尤其是随着高分辨率遥感影像的普及,考虑的地物类型、变化特征也随之增加,需要更有效的检测方法来解决这些问题。在变化检测方法中,还要考虑阈值的选择和图像的分割技术,这些都在一定程度上影响着变化检测的效果。可以运用多尺度交叉、多尺度融合[54,89]的方法更快地挑选出合适的阈值和图像分割尺度,进一步地提高变化检测结果精度。
四是在变化检测的效率上需要提高,现在对于变化检测方法的训练需要花费很多的时间和精力,尤其是用深度学习进行训练需要很高的实验配置以及大量的参数进行调整。预训练网络模型的共享以及在预训练好的模型上进行进一步的参数优化能减少模型训练上所耗费的时间;开发轻量级的模块提升网络模型的性能。
五是需要一些对变化检测后处理的研究,经过变化检测方法之后的变化图可能还存在一些噪声,但是现在对于后处理的使用还比较少。可以考虑通过设定阈值将零星的噪声去除,合适的阈值则要通过多次实验综合确定。
六是精度评价方法的广泛性问题,现在的精度评价主要是基于像素的方式进行,而对于面向对象以及特征级的精度评价还有待研究。可以尝试将图片分成规则或者不规则的区域块,每个区域内可能包含一个或多个像素点,同一区域块的变化类型是一样的,这样就可以不用一一对应像素,在基于面向对象和特征级的变化检测实验中可以更快速地获得结果。也可综合基于像素的评价方法与该方法得出变化类型。
综合过去对于变化检测过程中存在的一些问题和现有的一些比较先进的研究,本文提出以下几个变化检测领域未来的发展方向。
1)设计自动化的影像信息标注软件系统,可以很大程度上减轻人工标注的繁重工作,在能提高标注效率的同时还能保证标注的准确性。在这样系统的依托下一定能够很好地提高遥感影像变化检测的效率。
2)遥感影像变化检测从之前的变化、未变化的二值分类研究逐渐过渡到了地物类型之间互相变化的多分类研究,这种from-to的变化可以提供更多的信息,在城市发展规划、城市扩张的研究中都有很好的辅助作用。
3)基于深度学习的变化检测方法在近几年的研究中越来越常见,该方法通过其多层次、深层次的网络结构在语义层次的变化检测研究中表现出了巨大的潜力。
4 结语
遥感影像变化检测经过几十年的发展,现已广泛应用在城市规划、灾害监测、土地利用/土地覆盖等领域,能有效地实现对地球的保护、资源的可持续发展等目标。国内外研究学者们一直致力于提出一个综合性强、适用性广的遥感变化检测技术,实现自动化的、高效的变化检测过程。但是由于现实因素的种种限制,这一理想化的变化检测方法仍需进一步研究和验证[90-91]。
本文通过多位学者对变化检测的研究以及总结进行整理归纳,对变化检测领域进行综述,主要从变化检测的发展、变化检测的流程以及变化检测面临的挑战和未来的发展三个方面进行,其中第二部分也是大多数研究人员研究的重点,本文从数据选择及预处理、变化检测技术、后处理及精度评价这三个方面对其进行总结。
尽管现在提出了很多有关变化检测的方法,但是在变化检测领域依旧存在很多的问题和挑战。本文从数据影像质量、预处理过程、变化检测方法及效率、后处理及精度评价等方面提出了变化检测领域现存的一些问题。研究者们对于这些问题也提出了一些解决办法,而且随着时代的发展、技术的更新、新方法的引入,变化检测的效果也在一点一点地提升,尤其是近几年深度学习方法的引进,给变化检测领域带来了新的活力。
遥感影像变化检测为探测地物状态、地貌变化、城市发展等方面都带来了极大的帮助,在以后的生活发展中也是必不可少的一门技术,在各国学者的共同努力下,变化检测会朝着更好、更高效的方向发展。
