针式抓取装置的结构设计和仿真分析
2020-03-03曹丽芳赵皓张闯闯姜楠刘存祥王同朝
曹丽芳 赵皓 张闯闯 姜楠 刘存祥 王同朝


摘要:穴盘苗移栽是育苗移栽的重要方法,根据育苗移栽中存在的问题,利用SolidWorks软件设计了一种新的穴盘育苗机械手指夹持装置。该装置通过凸轮分割器控制4个指针的旋转和起停,以完成种苗的运输和交付;然后通过转换接口将模型数据导入ADAMS仿真软件中,通过ADAMS运动仿真,穴盘苗模块的采集、运输和投放运动轨迹被清晰地模拟出来,从而使结构设计实用可靠,运动准确性得以保证,大大缩短了开发周期和成本。
关键词:钵苗移栽;抓取装置;运动仿真;受力分析
中图分类号:S223.92文献标志码:A
文章编号:1002-1302(2020)22-0218-04
作者简介:曹丽芳(1989—),女,河南商丘人,硕士,助教,主要从事农业机械化工程研究。E-mail:15038041749@139.com。
穴盘移栽是充分利用阳光、争取农时、防止自然灾害、确保作物高产的重要措施[1-6]。但是,目前国内移栽机械多以半自动移栽机械为主。例如,旋转吊篮送苗机构、滑轨导苗机构等移栽机械,利用人手投苗、放苗,不仅浪费人力,降低工作效率,还会为了附加人力装置,使机器负重大大增加,带来一连串附加装置,自动化效益低,不能完成高效率的种植移栽[7-14]。
传统的移栽机械不仅生产效率低,而且难以实现大田自动化生产,所以大田全自动穴盘苗移栽是实现农业自动化研究的趋势。其中,可靠的取苗装置是实现全自动移栽的关键[15-18]。现有的自动抓取装置局限较多,无法适应全自动化钵苗的大田移栽种植。因此,本研究通过三维建模软件SolidWorks设计了一种穴盘苗取苗移栽机构——分割器导向针式机械手种苗抓放机构,并通过ADAMS运动仿真软件,对穴盘苗模块的采集、运输和投放轨迹进行模拟和运动分析,以保证该结构运动的可靠性。
1分割器导向针式机械手种苗抓放机构
分割器导向针式机械手种苗抓放机构的示意图如图1所示。该装置主要由分割器、上盘、下盘、机械手指、指针、锁紧装置、挡块等部分组成,由分割器和锁紧装置2个部分控制整个动作。分割器控制机械手指向下抓苗、向上提苗、带苗转动、到放苗筒位置向下放苗以及放苗后提升动作;锁紧装置控制上下盘相对位置,以致指针锁紧及松开,即当手指抓住秧苗时锁紧,使秧苗在机械手指中不会脱落以便于秧苗运输;当秧苗到达放苗处时,装置松开,使秧苗摆脱机械手,掉落至苗筒中。
[FK(W11][TPCLF1.tif][
工作原理:以机械手指在秧苗上方准备向下抓苗为初始位置,当电机带动分割器开始工作时,固定在分割器输出轴上的上盘开始向下运动,机械手指由下盘控制向中心转动,直至运动到行程最下端,机械手指达到最大倾斜角,抓紧秧苗。与此同时,固定在上盘上的锁紧装置随上盘下降,到最下端,将下盘与上盘锁紧在一起,完成抓苗动作;抓紧秧苗以后,上盘和下盘随分割器输出轴上升至行程最上端,然后随轴一起转动至放苗筒上方,继而下降至行程最下端,完成送苗动作;待秧苗到达最下端,挡块将锁紧装置按钮顶开,上盘和下盘脱离,上盘随分割器输出轴向上運动,机械手指打开,秧苗下落,完成放苗动作。
1.1分割器选型
为了满足停位抓取-转动-停位投放的动作,本研究选用出力轴上下往复运动兼间歇旋转左右摇摆运动为一体的升降摇摆式分割器(DH)。其动作示意图分别如图2所示。
该分割器仅由1个凸轮和转塔组合而成,适合左右摇摆,上下夹取系统紧密及高精密、高速度地夹取输送,提供所需的各种形式间歇运动。出力轴最大升降行程为60mm,满足穴盘钵土的高度。
1.2模型仿真
1.2.1模型添加运用Solidworks软件进行机械手部件的三维实体建模及参数计算。把模型导入ADAMS中进行运动仿真分析,(+z轴为重力加速度方向)模型导入ADAMS/view后,为了使针式抓取装置仿真时间缩短,提高仿真的成功率[19-20],在添加针式抓取装置仿真模型时简化装置模型,省去对结果影响不大的零部件,通过添加一些约束如旋转等代替省去的零部件的功用。
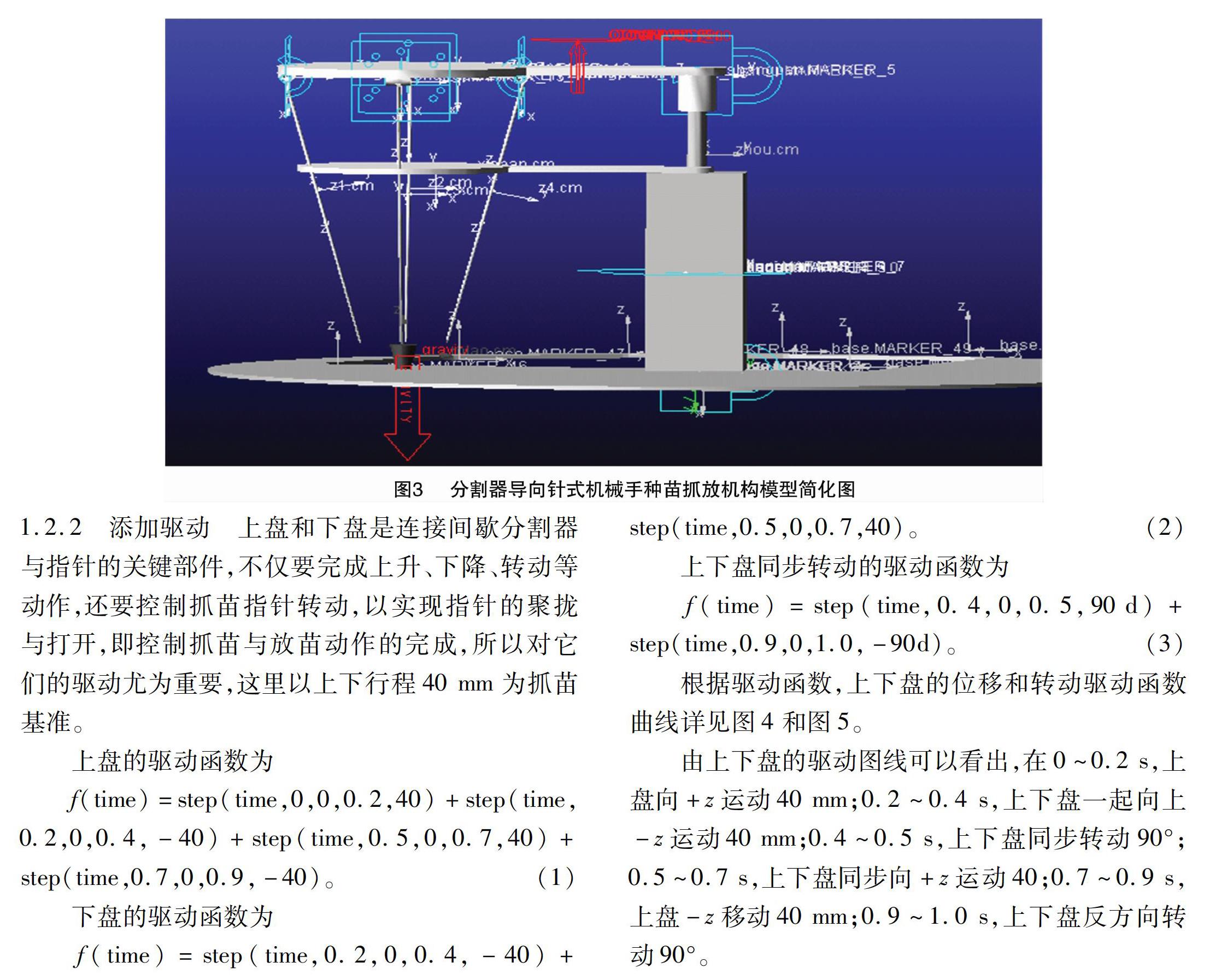
为了模拟的准确性,设计基准地面(base)以支撑秧苗,使其固定在大地上,秧苗与其添加接触约束,简化后的模型如图3所示。
1.2.2添加驱动上盘和下盘是连接间歇分割器与指针的关键部件,不仅要完成上升、下降、转动等动作,还要控制抓苗指针转动,以实现指针的聚拢与打开,即控制抓苗与放苗动作的完成,所以对它们的驱动尤为重要,这里以上下行程40mm为抓苗基准。
1.3运动分析
指针随上下盘的相对位移向圆盘中心转动,通过θ角(上盘与各个指针的夹角,简称指夹角度)的变化来实现对秧苗的加紧与松开,以完成取苗与放苗动作(图6)。
[FK(W9][TPCLF7.tif][
通过对上下盘添加驱动动作,指针整个过程角度θ变化如图7所示。在0~0.2s,上盘沿z轴正方向运动,下盘不动,指针向中心聚拢,这个过程θ由78.5°减小至71°。0.2~0.7s,上下盘处于锁紧状态,上下盘运动轨迹相同,θ变化为0,保持在71°。0.7s以后,上盘向z轴负方向运动,θ由71°恢复到78.5°。
通过上下盘的相对运动,4个指针同步转动,秧苗依次被指针抓紧—随指针上升—同指针转动—随指针下降—指针打开秧苗下落。秧苗的速度和位移曲线和曲线如图8和图9所示。秧苗质心标记点全过程的运动轨迹图见图10,图中红线即为秧苗运动轨迹。
秧苗的轨迹主要由2个部分组成,一是通过抓苗装置带动其完成抓取投放运动,另一部分是在秧苗脱离机械手指后,由自身重力引起的运动。2个部分在z方向的运动函数为
通过ADAMS运动分析,得到秧苗在z方向的位移速度函数曲线如图11所示。
通过速度位移曲线,做位移函数的微分,得到红色虚线(图11),由此可见,红色虚线与速度函数曲线基本重合,正好符合位移的导数即速度。
2结语
通过ADAMS仿真软件对针式抓取装置设计结构进行仿真,结果表明,指针式穴盘苗抓取装置能够准确可靠地完成秧苗的抓取、移动和投放等动作;对抓取装置参数的设计及仿真分析表明,在开始制造样机前,模型参数进行了分析和多次优化,大大节省了样机试验优化参数时间,提高了装置的制造效率。
参考文献:
[1]房骏,陈宏波.玉米育苗移栽机械化技术介绍[J].农机市场,2010(12):57-58.
[2]ZhangG,XuQ,PanY,etal.Influenceofmechanicaltransplantingpotseedlinguprightdegreequalificationrateofexperimentalresearch[J].JournalofHuazhongAgriculturalUniversity,2004,12(5):463-465.
[3]刘效亮,李其昀.育苗移栽机械化发展方向[J].山东理工大学学报,2003,13(3):108-110.
[4]于修刚,袁文胜,吴崇友.我国移栽机研发现状与链夹式移栽机的改进[J].农机化研究,2011,1(1):232-234.
[5]熊耐新,全腊珍,邹运梅,等.我国棉花移栽机的现状与发展趋势[J]湖南农机,2010,37(1):1-3
[6]夏俊芳,王树才,许绮川.我国棉花营养钵移栽机现状与发展趋势[J].中国农机化,2002(1):35-37.
[7]李其昀,鲁善文,杨宪武.棉花移栽机的实验研究[J].农业装备与车辆工程,2006(1):14-17.
[8]韩占全,封俊.我国旱地栽植机械的现状和发展前景[J].现代农机化,2000(8):29-31.
[9]陈风,陈永成,王维新.旱地移栽机现状和发展趋势[J].农机化研究,2005(3):24-26.
[10]李其昀,魯善文,杨宪武.吊篮式棉花移栽机的研究[J].农机化研究,2006(4):164-166.
[11]封俊.大葱移栽机[J].中国蔬菜,2001(5):57.
[12]DongF,BaiX,WangZ,etal.Studiesonseedlingseedlingtransplanterwithbeltconveyerfeedlingmechanism[C]//ProceedingsofInternationalConferenceonAgriculturalEngineering,1999:12-15.
[13]封俊.移栽机的性能评价指标与检测方法[J].农业机械学报,1998,14(2):73-77
[14]王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].农业机械化与电气化,2003(5):5-6.
[15]詹国祥.油菜移栽机械的研究与推广[J].农业机械,2002(1):26-27.
[16]尹国洪,陈巧敏.旱地育苗移栽机械现状、发展趋势与前景[J].中国农机化,1997(5):9-11.
[17]林菲.富来威2ZQ-4油菜移栽机入选补贴目录[J].农机科技推广,2009(4):64-64.
[18]孙裕晶.2ZT型移栽机的研究设计[J].农机化研究,1999,2(1):53-54
[19]马强,陈志,张小超,等.基于ADAMS的果树采摘机械臂的运动仿真分析[J].农机化研究,2013(5):37-41.
[20]李红勋,刘辉,徐更杰,等.挖掘机主要部件的虚拟样机仿真分析[J].工程机械,2009,40(10):36-39.
