基于神经网络和DP算法的PHEV能量管理策略研究
2020-03-03李开放田一鸣
李开放 田一鸣
摘 要:以某款PHEV为研究对象,利用DP算法求得UDDS工况下离线最优控制序列。利用神经网络对离线最优控制序列及对应汽车状态进行学习训练,建立控制变量神经网络在线预测模型。仿真结果表明,所设计策略实现了离线最优控制变量的良好跟随,且燃油经济性提升明显。
关键词:PHEV 能量管理策略 DP算法 神经网络
Research on PHEV Energy Management Strategy Based on Neural Network and DP Algorithm
Li Kaifang Tian Yiming
Abstract:Taking a PHEV as the research object, the DP algorithm is used to obtain the offline optimal control sequence under UDDS conditions. The article uses the neural network to learn and train the offline optimal control sequence and the corresponding car state, and establish an online prediction model of the control variable neural network. The simulation results show that the designed strategy achieves a good follow-up of the offline optimal control variables, and fuel economy is significantly improved.
Key words:PHEV, energy management strategy, DP algorithm, neural network
1 引言
能量管理策略是PHEV核心技术之一[1],其本质是基于工况,发动机和电机的功率分配问题,以期获得最佳的整车燃油经济性。与其他策略相比,全局最优策略能获得理论上最小的燃油消耗值[2],但其必須在工况已知的情况下,预先求出电机转矩或发动机转矩的最优控制序列,然后在仿真或实际实验中,严格对照时间步长,一一离线调用上述最优序列。本文首先利用动态规划(DP)算法求得PHEV在UDDS工况下的离线最优电机转矩和传动比序列,该序列与当前所对应的汽车状态构成离线数据库,然后基于BP神经网络,对该数据库进行学习训练,建立控制变量在线预测模型,该模型实现了离线最优控制序列的在线应用,而不需要依照仿真步长,严格一一对应调用离线最优控制序列,为后续进一步PHEV基于不同工况的在线能量管理策略研究提供一定理论依据。
2 基于DP算法的离线最优控制序列获取
DP算法又称为Bellman优化算法[3],该算法通过将某个复杂系统求解问题拆分成若干相互关联子问题,从而将整体求解步骤化,通过局部求解逆推获得全局最优解。本文所研究PHEV是一款双轴并联式混合动力汽车,具有发动机和电机两套动力源。动力系统需求功率与发动机功率和电机功率关系如公式(1)所示。
Preq(t)=Pe(t)+Pm(t) (1)
式中:Preq(t)为每一时刻车轮需求功率;Pe(t)为发动机功率,Pm(t)为电机功率。
在整车参数及动力系统结构已知,汽车行驶工况确定的前提下,决定动力系统总需求转矩的只有传动比。且根据公式(1)可知,电机转矩和发动机转矩二者在一个确定的前提下另一个自然确定。因此,本文选择传动比和电机转矩作为DP算法中的控制变量。状态变量反应汽车当前的一种状态,本文选择选择蓄电池荷电状态(SOC)以及传动比作为状态变量。
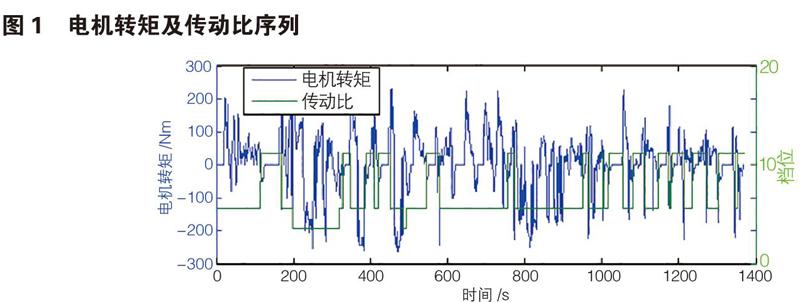
本文主要研究PHEV的燃油经济性,不涉及排放问题,因此以全局燃油消耗作为最终的目标函数。基于上述原理,编写DP算法程序,以UDDS工况作为实验工况,求得该工况下电机转矩和传动比序列如图1所示。
3 基于神经网络的控制变量在线预测模型设计
3.1 神经网络基本原理
神经网络又称人工神经网络,由大量神经元(节点)通过一定的连接方式构成,是一种模仿人脑处理信息方式的复杂数学模型,具有学习、记忆和智能处理计算的功能[4]。由于神经网络具有优越的数据处理分析能力,目前已经成为了许多专业领域一种必不可少的分析工具。根据神经元连接方式不同,神经网络可分为多种结构。其中BP神经网络是应用较为普遍的一种网络。BP神经网络自学习和自适应性能好,并且还具备良好的鲁棒性和泛化能力,理论成熟,因此本文采用BP神经网络对上述所获得的离线最优控制变量序列及对应的汽车状态进行学习训练,设计控制变量在线预测模型。
3.2 在线预测神经网络模型设计
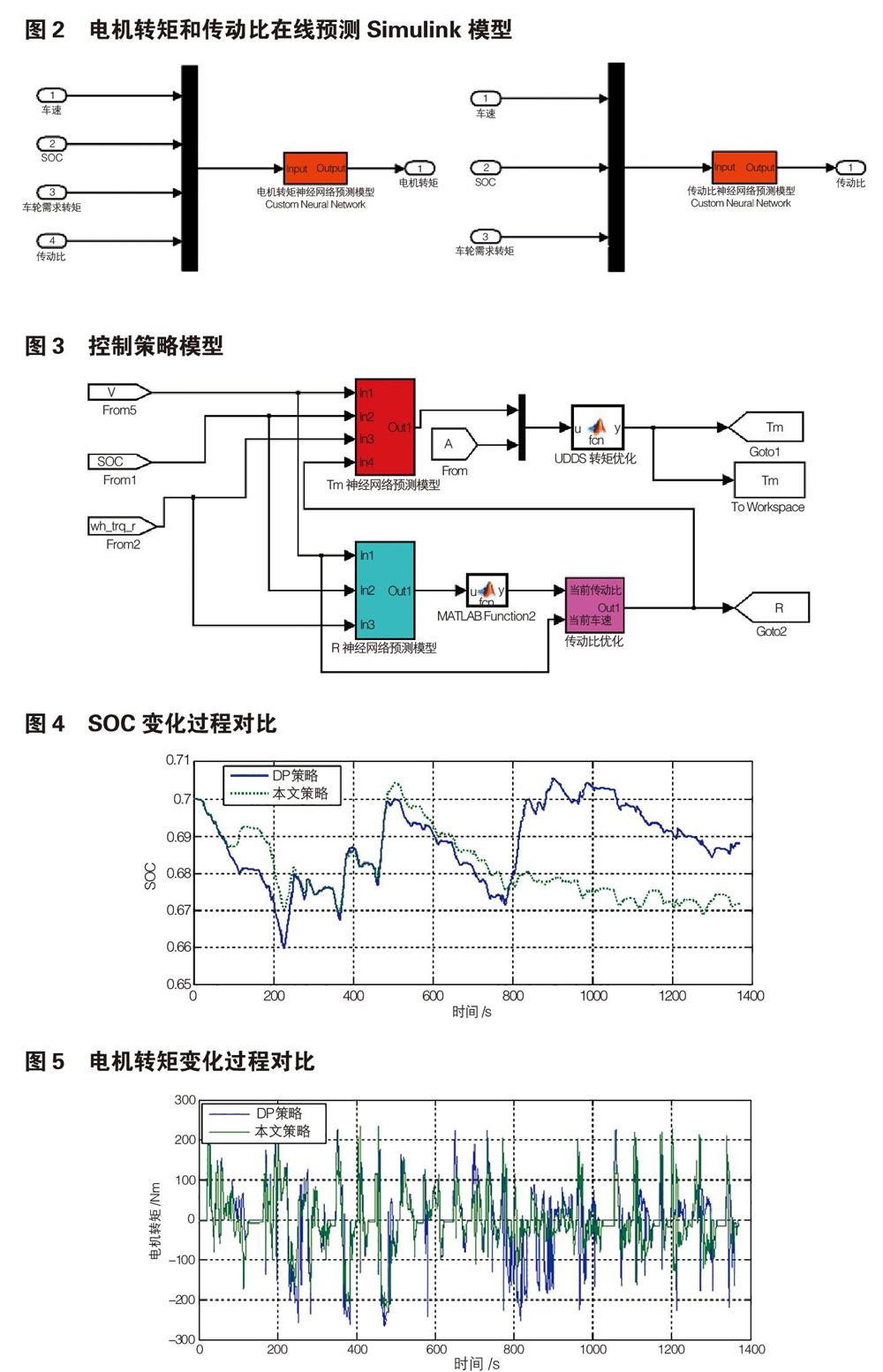
对于单隐含层BP神经网络,在数据库样本个数确定的前提下,为保证网络训练的精度,还应确定合适的神经元节点数。本文研究中,通过试凑法,分别以最高网络回归值和训练准确率为目标来获得最佳的神经元节点数。通过试验,电机转矩网络预测模型选择节点数为12,其模型的回归值为0.96;传动比网络预测模型选择节点数为15;其模型的训练精度为97%,学习训练结果较为合理。在此基础上,建立电机转矩和传动比神经网络在线预测Simulink模型,如图2所示。
4 策略仿真及结果分析
本文所建立控制策略模型核心部分如图3所示,将图3所搭建模型嵌入到整车模型之中,使用UDDS工况进行仿真验证。基于DP算法的离线最优能量管理策略和本文所搭建策略下SOC变化过程对比;图4为两种策略下电机转矩变化过程对比。
由图4可知,在本文设计策略下,SOC变化范围为0.661至0.706,范围波动较小。且SOC变化轨迹与DP策略下轨迹大致相同。图5电机转矩值进一步验证了图中10中SOC变化过程,且本文策略下电机转矩变化过程与DP策略下也大致相同。综上所述,表明所设计的控制变量神经网络预测模型性能良好,实现了对离线最优序列的良好跟随。将SOC末值修正至同一水平后燃油消耗对比可知[5],本文所设计策略燃油消耗为9.18 L/100km,相比于离线最优策略的7.30 L/100km,燃油消耗有一定幅度提升,但相比于默认的电机助力控制策略的11.51 L/100km,其燃油消耗仍然节约了14.8%,燃油经济性提升明显。
5 结束语
本文针对某款PHEV,基于DP算法和神经网络建立一种能量管理策略,实现了离线最优控制序列的在线应用,SOC离线最优轨迹的良好跟随,且整车燃油经济性提升明显,为后续进一步的研究提供了依据。
参考文献:
[1]秦大同,赵新庆,苏岭,杨官龙.插电式混合动力汽车变参数能量管理策略[J].中国公路学报,2015,28(02):112-118.
[2]苏岭,曾育平,秦大同.插电式混合动力汽车能量管理策略研究现状和发展趋势[J].重庆大学学报,2017,40(02):10-15.
[3]勾华栋. 基于动态规划的并联混合动力客车能量管理策略研究[D].吉林大学,2015.
[4] 李友坤. BP神经网络的研究分析及改进应用[D].安徽理工大学,2012.
[5]赵春阳. 基于行驶工况辨识的混合动力客车控制策略研究[D].吉林大学,2015.
