无人水下航行器陆地模拟试验系统
2020-03-03
海装装备项目管理中心 北京 100161
1 设计背景
水下航行器的研究工作始于二十世纪四五十年代,最初为研制载人水下航行器。从二十世纪六十年代开始,研制遥控水下航行器(ROV)。最近20年的研究重点为发展自主式水下航行器(AUV)。ROV和AUV统称为无人水下航行器(UUV)[1]。
无人水下航行器在海军作战、海洋环境研究及海洋资源探测方面具有广泛的应用前景。无人水下航行器航行过程中的障碍识别和路径规划尤为重要,但海洋模拟存在试验数据采集困难、数据量大、环境复杂、试验对象易丢失等不足[2-4],对此,笔者设计了一个陆地模拟试验系统,主要测定在水深变化和出现障碍物时的航向变动,方便观察试验对象导航、打舵、深度控制及躲避障碍物的精准度。这一陆地模拟试验系统由池体、水深模拟模块、障碍物模拟模块和检测系统组成,池体、水深模拟模块和障碍物模拟模块为试验对象提供模拟的运行环境,检测系统包含测量单元、数据采集和处理单元、数据传输单元、控制单元和数据输出单元,主要测定俯仰角、偏航角及横滚角等参数。
2 运行环境模拟
2.1 池体
池体尺寸为3 m×1.5 m×1.5 m,池体四周材质为有机玻璃。池体底部为采用钢板制作的假底结构,通过导向装置进行顶紧固定[5],并采用液压升降装置控制升降[6]。试验对象采用等比例缩比模型,以水下航行布雷器为例,按照1∶5制作缩比模型。水下航行布雷器由高自由度旋转装置固定在托槽中,即采用单个滚珠固定在类轴承结构中,以减小转向打舵时的外部阻力及干扰,满足在模拟试验中的测定需求[7]。池体结构如图1所示。

▲图1 池体结构
2.2 水深模拟模块
池体底部采用液压升降装置控制假底升降,假底上升时模拟水下航行布雷器下潜过程,假底下降时模拟水下航行布雷器上浮过程。水深模拟模块结构如图2所示。
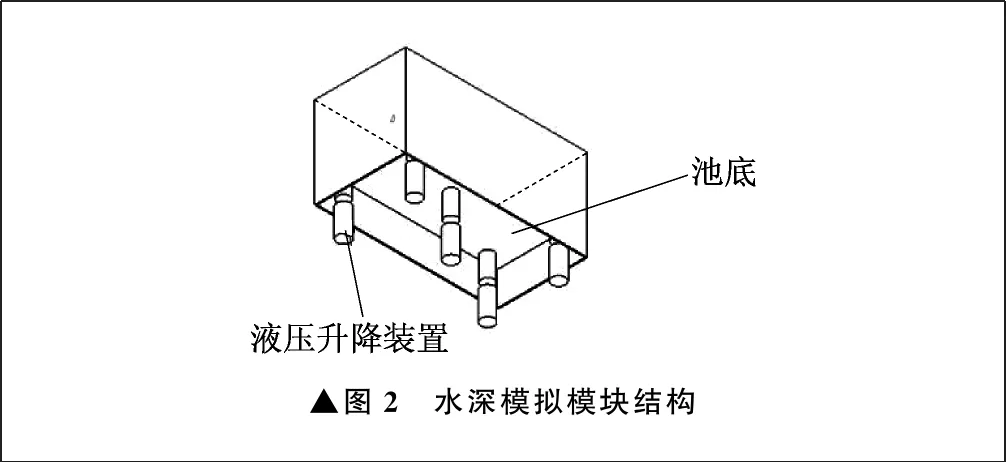
▲图2 水深模拟模块结构
2.3 障碍物模拟模块
障碍模拟模块由若干自定义形状的滑块和滑道组成,每个滑块可模拟不同类型的水下障碍物。滑块置于池底,由机械装置进行滑动控制。滑块滑向水下航行布雷器模型近端时,模拟障碍物接近工况。滑块滑向水下航行布雷器模型远端时,模拟障碍物远离工况。障碍物模拟模块如图3所示[8]。

▲图3 障碍物模拟模块
3 检测系统
检测系统原理如图4所示。无人水下航行器的舵机固定在测试台上,加载扭杆的一端固定,另一端通过联轴节与舵机输出轴相连,并随舵机轴偏转产生变形来模拟舵机所受到的铰链力矩[9]。外部220 V、50 Hz交流电经交直流转换器转换为稳定的直流电压,为系统供电。光电编码器安装在舵机输出轴的近端,用于感知角度变化,同时转换为正交脉冲数字信号,经接口电路送入数字信号处理器进行处理,运算后各项测量值显示在液晶显示屏上。
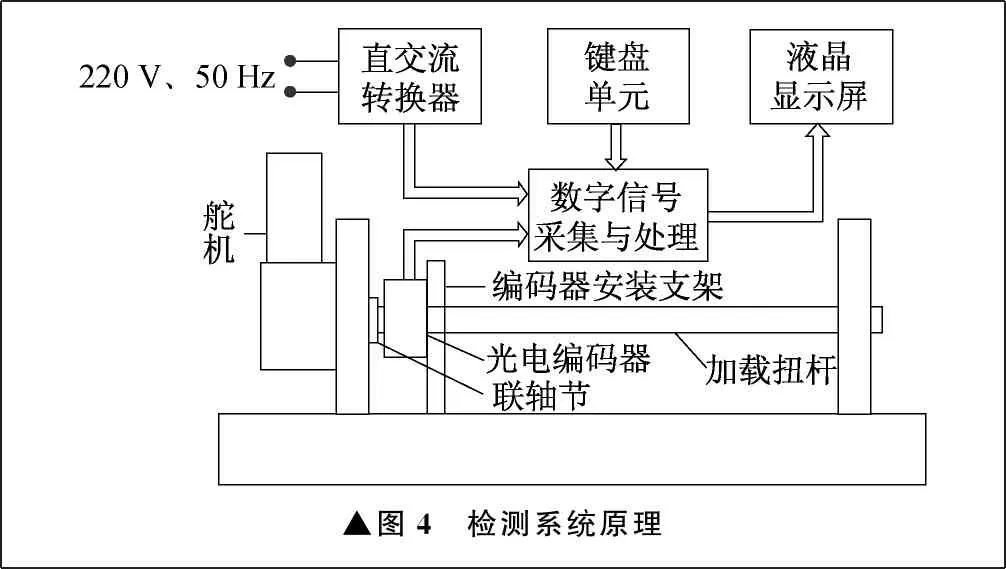
▲图4 检测系统原理
3.1 测量单元
系统以增量型光电编码器作为角位置测量元件[10-11],测定俯仰角、偏航角及横滚角等参数,对在航行过程中障碍识别和路径规划的精确度进行模拟试验。根据分辨率、转动惯量和机械结构,选择型号为ZKT-59的光电编码器。
3.2 数据采集和处理单元
数据采集和处理单元包括数字信号处理器、电源、时钟和外扩存储器等。舵机的偏转运动短时、快速,对数字信号的采集和处理速度要求比较高,因此选用TMS320LF2407A型数字信号处理器作为系统的核心处理器。该处理器指令周期为2.5 ms,实时控制和运算能力强,具有丰富的硬件资源和外设接口,内置正交编码脉冲电路,不需其它辅助电路就可处理光电编码器的输出信号,还具有转向判别和四倍频功能。采用10 MHz有源晶振,经LF2407A内部锁相环倍频之后达到频率为40 MHz的工作时钟。采用MAX811型电源监控器件来进行电源监视和复位控制操作。采用CY7C1021型静态随机存取存储器作为外扩存储器,具有64 KByte×16 bit的存储空间,读写周期为12 ns,数字信号处理器能够对其进行零等待读写。外扩存储器设于数字信号处理器的外部总线上,片选端口通过跳线与数字信号处理器的PS引脚或DS引脚相连,可以作为程序存储器或数据存储器使用。
3.3 数据传输单元
光电编码器工作电压为+5 V。编码器的正交信号和零位信号分别经74LVC245型芯片进行电平转换后送入数字存储示波器的正交编码脉冲电路单元和捕获单元。传感器的输出信号线统一进行屏蔽处理,以提高系统的抗干扰能力。
3.4 控制单元
试验前需设置系统的配置,例如采样周期等。测量中为实现在任意位置的相对零位建立、绝对/相对位置切换、60进制/10进制显示切换和液晶显示清零等功能,系统采用四个独立的键盘来分别进行控制。在系统工作的配置阶段和测量阶段,键盘所实现的功能是不同的,可通过在软件上设置不同阶段的标志变量来判断键盘处于何种阶段,可实现何种功能。
3.5 数据输出单元
数据输出单元用于显示参数名称及测量值,参数名称用汉字显示,测量值通过字符显示。为满足显示容量的需求,采用240×128点阵式液晶模块,内置T6963C型控制器,包含美国信息交换标准代码字符发生器,每屏可显示15×8个汉字或30×16个字符,能够同时显示指标要求的各项测量信息。数字信号处理器采用间接控制方式控制液晶模块,液晶显示采用5 V电压器件,与数字信号处理器之间需加入电平转换单元以避免处理器损坏。
4 结束语
无人水下航行器陆地模拟试验系统设计方案包含池体、内部结构和测量系统硬件,可模拟水下航行器在水深变化及出现障碍物时的工况,测定航行器俯仰角、偏航角及横滚角等参数,为无人水下航行器的设计或改进提供必要的试验数据。
