基于C52 单片机的履带式节能驱鸟机器人设计
2020-03-02周桂宇ZHOUGuiyu石薇SHIWei杨凯YANGKai陈泓州CHENHongzhou夏瑞清XIARuiqing胡思泓HUSihong税钰凇SHUIYusong
周桂宇ZHOU Gui-yu;石薇SHI Wei;杨凯YANG Kai;陈泓州CHEN Hong-zhou;夏瑞清XIA Rui-qing;胡思泓HU Si-hong;税钰凇SHUI Yu-song
(宜宾学院智能制造学部,宜宾644000)
1 背景
在机场,为了保证飞行器起降安全,避免飞机高速起降时鸟儿被吸入飞机的发动机,或者是撞击到飞机机身、机翼、尾翼、起落装置等部位,从而在机场关键飞行区域、特别是在飞机起落的跑道或滑行道上采用超声波、仿生语音、视觉、生态或雷达等手段[1]。在农场、果园、菜地和机场等地,也采取一些驱鸟手段防止有害鸟类侵入自己的领地,危害到自己劳动成果或设备安全。
驱鸟装置在国内农牧业的驱鸟设备上,有风力驱鸟机、智能语音驱鸟机、电力输入线驱鸟器、智能超声波驱鸟器等[2]。风力驱鸟机的就是利用风来提供动力再通过轴承转动达到驱鸟的效果;智能语音驱鸟器则是实时控制语音装置来达到驱鸟的目的;电力输入线驱鸟器则是利用鸟类遭遇困境或垂死前的呜叫等,在生物学上的应激反应来驱鸟的原理;智能超声波驱鸟器则是根据超声波的一些特点设计的一种智能超声波驱鸟装置[3]。
国外的一些农牧场上,使用最广的是驱鸟车,它由图像探测和声波、激光组合而成,它是可以实现驱鸟车快速移动,它的驱鸟手段就达到了多样化,现有驱鸟设备驱赶手段单一,无法对目标进行发现以及做出一系列反应达到驱鸟效果,而驱鸟车大大提高了驱鸟效果[4]。
鸟类的种类繁多,但大多数是以农作物为主食的。顾名思义,害鸟就是给农作物生产带来损失的鸟类,这些鸟类会将农作物的果实当作食物。另外就是益鸟,是对人类有益的鸟类。农业生产当中,鸟类主要将作物的种子或者果实当作了食物,这样不论哪种情况都会导致在庄稼的收获季节收成并不如人意。此外有些鸟吃鱼苗,也是害鸟。这两类鸟都是比较常见的,且它们都主要以作物为食,它们适应环境能力和繁殖能力都很强,历年来给农牧业作物生产带来极大危害,造成这些作物的大量减产,所以解决鸟害是刻不容缓的,对提高农作物产量具有积极的意义。这些年来,由于人们环保意识的提高,大自然的生态也越来越适宜鸟类的生存以及繁衍生息,鸟类危害农作物这一问题也越来越严重,普通农家的田间是缺乏必要的栅栏等阻隔鸟类的阻拦物,鸟类危害作物的情况更是愈发明显,这种情况会导致农作物大量减产。在这样的问题驱使下,驱鸟机器人应运而生。
2 总体设计方案
2.1 总体框架和主要内容
本次设计的节能驱鸟机器人总体框架如图1 所示,供电模块由风力发电机和太阳能电池板构成,多种供电模块相互补偿,具有吸收、储备、转换、供应能量等模式。能够及时监测太阳光照强度和风力大小,根据系统所需能量进行调整。锂电池可以充电和供能,起到能源切换的作用,切实保证供电模块的正常运行。前后两个红外传感器探测360 度范围内是否有鸟儿,通过探测装置获取的信息发送给C52,C52 分析数据智能的把信息传送给驱鸟模块,驱鸟模块通过电机挥动手臂驱赶鸟类,同时启动语音模块和闪烁光模块进行驱鸟。语音驱鸟模块,会不断更新恐鸟语音,每天随机播放,达到驱除多种鸟类的效果。LCD 用于显示每天驱赶鸟儿的情况。使用脉冲信号记录每天成功驱赶鸟儿的个数,反馈回主控模块进行统计,然后改进,最后投入生产。

图1 驱鸟机器人总体框架
按键功能:复位,机器人的启停,探测模块的启停,驱鸟模块的启停、切换。
主控芯片:STC89C52 单片机模块。
输入端:供电模块、红外传感器、灯光闪烁模块、按键。
输出端:电机驱动、驱鸟机器人本体、语音模块、LCD显示。
2.2 研究思路和研究方法
节能驱鸟机器人是由声音驱鸟,机械摆动驱鸟于一体的多功能节能驱鸟器。该机器人头部安装有太阳能电池板,脸部装有灯。腹部安装有LED 显示屏,可以显示驱鸟数据,以便观察驱鸟效果。内部含供电板块、红外传感器、按键、大容量可充电锂电池等多个板块。背部装有风力发电装置,手臂为机械臂,可360 度无死角转动。底部安装有履带,方便机器人移动。其表面设有三个开关,一个为电源开关,一个开关控制声音,一个控制灯光亮度。节能驱鸟机器人整体分为三个系统,分别为探测系统、驱鸟系统和供电系统。该机器人图如图2 所示。
节能驱鸟机器人三视图如图3、图4、图5 所示。
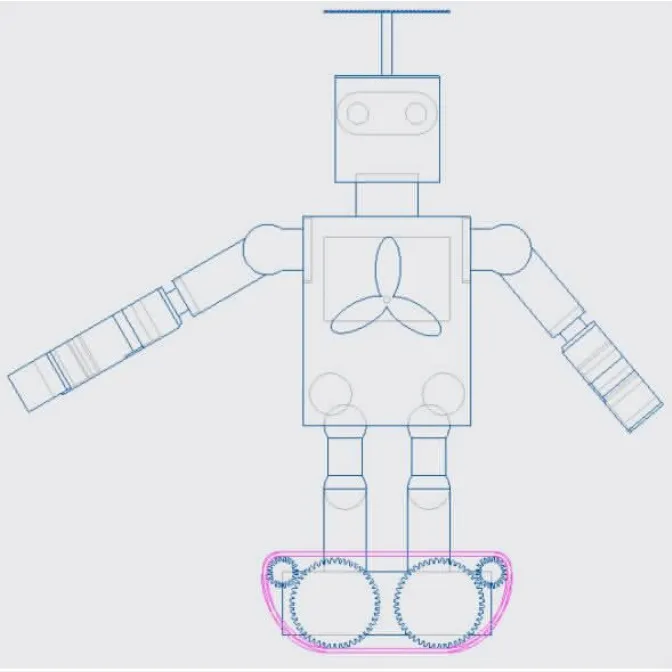
图3 正视图
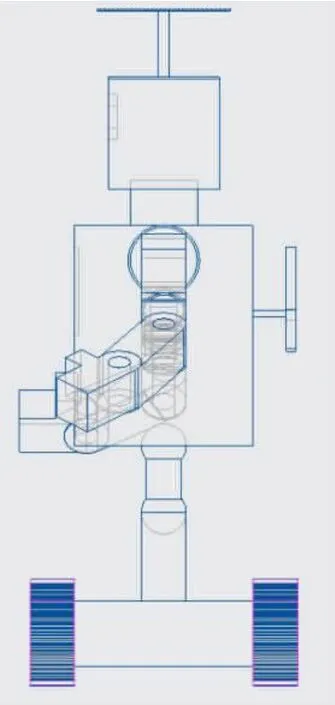
图4 侧视图
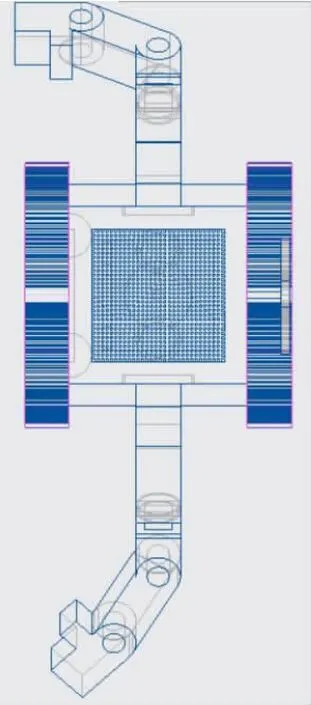
图5 俯视图
2.3 探测系统
红外检测板块,能够远距离检测鸟类释放的红外线,为了提高灵敏度以增大探测距离,内部有放大电路,可将信号放大。当鸟类进入红外传感器的探测范围,传感器向单片机输入一高电平,单片机进入工作模式,驱动驱鸟系统工作[5]。工作原理图如图6、图7 所示。
2.4 供电系统
供电系统由单片机电路、电源电路、太阳能电池板电路、风力发电电路、锂电池充电保护电路、升压电路、稳压电路、光敏电阻电路等设计而成。采用钢化玻璃及绝缘防水树脂、TPT 耐老化材质进行封装的单晶硅太阳能电池两块,坚固耐用,使用寿命可达25年。太阳能电池通过吸收太阳光,将太阳辐射通过光电效应或者光化学反应直接或间接转化为电能,再由太阳能电池板给锂电池充电,锂电池有充放电保护电路和稳压电路,升压电路将锂电池的电压升到5V 给单片机和附属电路供电。两块太阳能电池板并联,经稳压后输出电压为5V,输出电流为2400mA,晴天天气时,对两节3200mA 的锂电池充电,充满大约需要3.2小时。充分利用了太阳能普遍、巨大、无害、长久等优点。
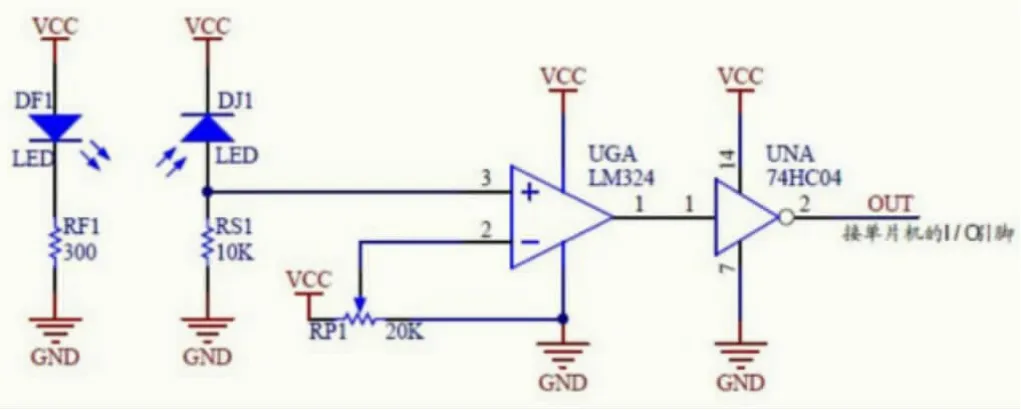
图6 探测系统工作原理图
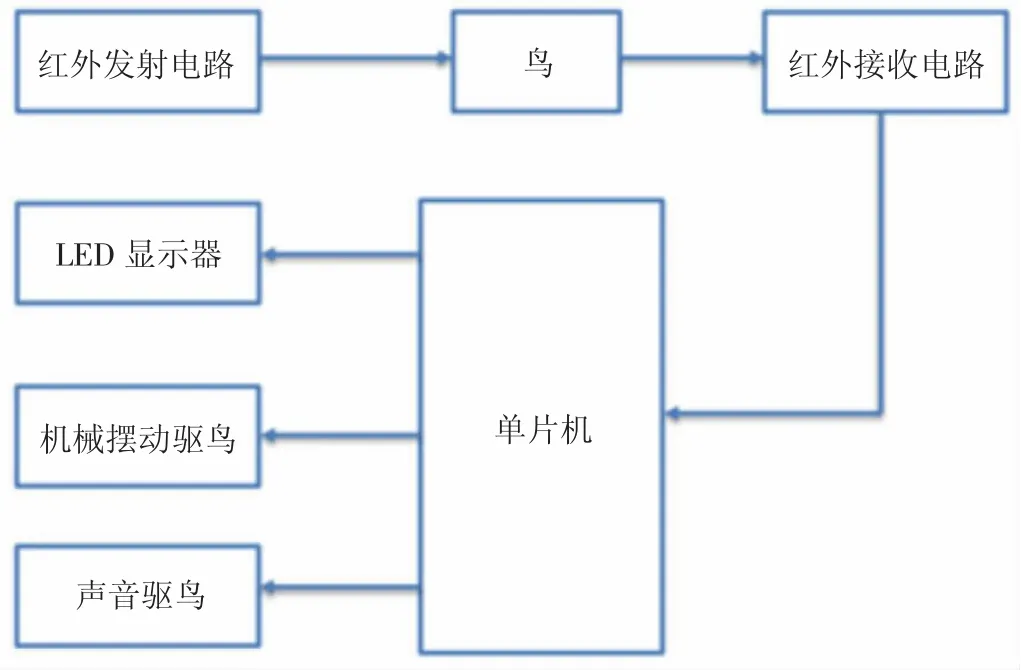
图7 探测系统工作原理图
风力发电是自然风吹转叶轮,带动轮子转动将风能转变为机械能,再通过增速机将旋转的速度提升,然后通过传动机构将机械能送至发电机转子,带动转子旋转发电,实现由机械能向电能转换。依据目前的风车技术,大约是每秒三公尺的微风速度(微风的程度),便可以开始发电。充分利用了风能的清洁、环境效益好、可在生、永不枯竭等优点。
2.5 驱鸟系统
对于大部分农田的主要害鸟麻雀和灰喜鹊,我们选取害鸟的天敌苍鹰和各类害鸟求救、恐惧、哀鸣等负面情绪的声音以及猎枪、爆炸声等刺激性高保真声音,将各种音效存于存储芯片中。播放的声音可以根据实际害鸟的种类进行换,以确保驱鸟效果达到最优。音频文件的播放方式可设置为随机播放,以防止害鸟对驱鸟声音产生适应。将锂电池的电能转化为机械能,带动发动机,从而实现机械臂的转动。
3 节能驱鸟机器人程序流程图
节能驱鸟机器人开始工作后,整个系统将会由子程序接受中断服务进行控制。当没有侦查到鸟类时,系统会先初始化各个板块,还会进入休眠模式节约整个系统的能源。当有鸟类进去红外探测模的探测范围时,微控制器会被一个中断信号唤醒,让STC89C52 启动并且开始驱鸟工作。进而白天驱动声音驱鸟模块及机械臂摆动驱鸟模块工作,晚上驱动灯光驱鸟模块。当驱鸟成功后,系统将继续工作30 秒,夜晚关闭灯光模块,白天关闭机械摆动模块和声音模块,然后系统进入低功耗模式,若驱鸟不成功,系统将会持续工作,当鸟类被驱赶走才停止。这样既能保证实现驱鸟效果,又能最大程度上节省能源消耗。驱鸟流程如图8 所示。
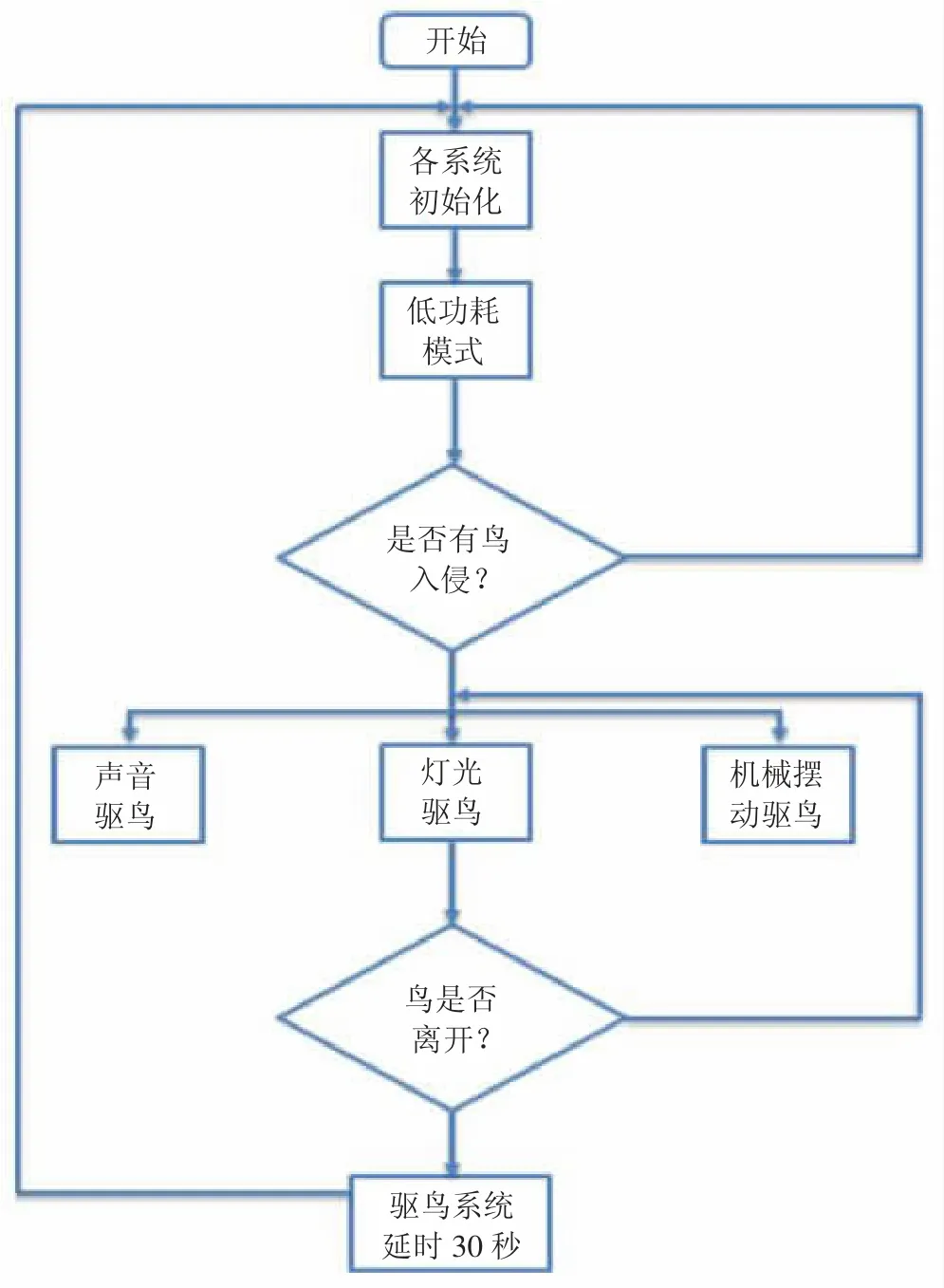
图8 驱鸟流程图
4 总结
这款设计主要针对于对鸟类的驱赶,最大的特点就是不对鸟类造成任何伤害,只是通过机械手臂的摇晃来恐吓鸟类使它远离这一片区域。不会像用超声波驱鸟会对鸟类造成伤害,利用鸟类天敌的声音来驱赶鸟类。使用多功能供电系统就避免了供电条件单一的情况。太阳能和风能这种可再生资源,还体现了本次设计最大的特点——节能。本系设计的方案能够为系统节约资源,设计出来的电路更趋于简单化,后期也会较方便地进行各类地形的安装与便捷使用,具有广泛的应用前景。
