基于卫星定位技术的智能出行系统研究
2020-03-02谢文娣王海龙黄家宝贺文龙
谢文娣,王海龙,黄家宝,贺文龙
(安徽新华学院电子通信工程学院,安徽合肥 230088)
0 引言
随着云计算、大数据、人工智能、移动互联、移动物联等新兴技术的发展,智能化理念已逐渐渗透到人们生活的方方面面,智能出行的概念应运而生,可利用卫星定位、移动通讯、高性能计算、地理信息系统等技术实现位置和速度等信息实时显示,为人们出行提供良好的便利[1,2].人在航海过程中、沙漠里因环境等因素可能迷失方向,出现生命危险,驾驶汽车过程中可能会遇到碰瓷现象或交通事故,此时出行记录设备将发挥重要作用.因此,本文提出一种基于卫星定位技术的智能出行系统进行精确定位、实时采集数据和图像并记录,可实时呼救及时得到救援,以及还原事故现场.
1 设计方案
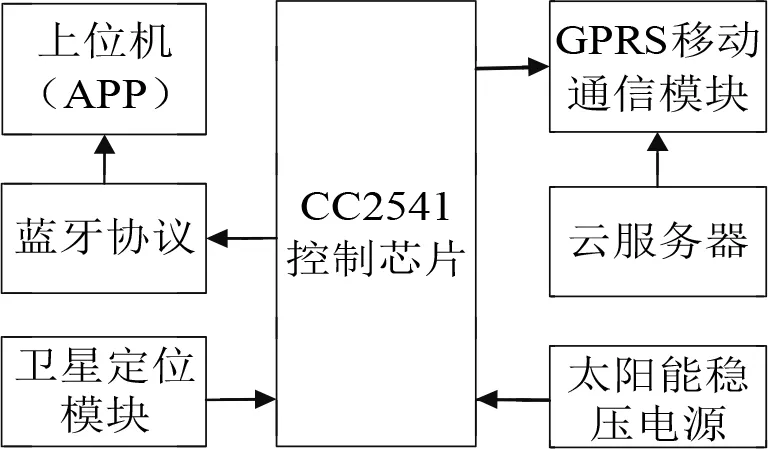
图1 系统架构图Fig.1 Design diagram of the system
该卫星定位智能出行系统是对出行工具行驶速度、时间、里程以及有关出行工具行驶的其他状态信息进行记录、存储并可通过接口实现数据输出的数字式电子记录装置.它主要由定位模块、蓝牙模块、GPRS通信模块、太阳能稳压充电模块、上位机等部分组成,采用GPS卫星定位模块采集数据,通过蓝牙模块实时将数据发送到手机APP上显示,同时利用GPRS移动通信模块SIM900A将卫星定位的经纬度、速度、加速度、文字等信息上传至远程云服务器,人们通过PC端查看云服务器和上传至服务器中的数据包,最终实现位置信息、日期、时间和速度等数据记录和采集的功能.系统整体框架图如图1所示.
2 系统设计与实现
硬件上,卫星定位模块采用BN-280芯片,支持GPS和北斗双模输出,利用卫星定位当前位置和确定当前时间实现数据采集.数据传输则依赖于以CC2541为核心的蓝牙模块CC2541EMV2.6,该模块稳定性好且传输距离远,它将数据实时传送到手机APP上显示.GPRS通信模块采用SIM900A模块,可实时上传经纬度、海拔高、速度、日期、时间信息至云服务器,实现远程监测.电源模块采用3.7 v的锂电池,并辅以太阳能稳压充电,达到低碳环保的目的.CC2541电路图如图2所示.

图2 CC2541电路图Fig.2 Circuit diagram of CC2541
CC2541模块设有4个振荡器,分别为32 MHz外部晶振、16 MHz内部RC振荡器、32 kHz外部晶振和32 kHz内部RC振荡器,可以为内部时钟提供时钟源,系统上电时,默认使用内部16 MHz时钟和32 kHz振荡器.若系统对精度要求高,作为无线RF收发,需接外部32 kHz晶振.
BN-280定位模块采用UBLOX G7020-KT芯片设计,具有高精度、高灵敏度、低功耗的特点,具备全方位定位功能,常用电压3.3和5 V,广泛应用于开发多种GPS终端产品.
SIM900A模块属于双频GSM/GPRS模块,具有低功耗,方便灵活,操作简单成本较低且稳定的特点,掉线之后可以自动连接,工作电压为3.1~4.6 V,可提供包括语音、短息和GPRS数据传输等功能.
软件上,该系统采用半开源手机APP Laptimer,利用Lua语言自主编写App脚本,支持Android和IOS系统.定位模块通过连接卫星获得实时数据,包括经纬度、海拔高、时间、速度等,将数据通过串口发送到CC2541芯片,它将接收到的数据进行解析压缩,通过天线转发给手机并在APP上实时显示[3,4].同时可通过串口将数据发送给GPRS通信模块SIM900A,再通过连接附近的基站,最终将数据上传至云服务器,实现远端监测.其设计流程分别如图3、4、5所示.服务器大致流程为首先打开手机蓝牙开关,运行WHLSCRL脚本,搜索到蓝牙设备名称为WHL、服务UUID为FFF9、特征UUID为FFF6并建立连接;然后获取压缩包数据,得到GPRS实时数据如经纬度、方向角海拔高度、定位卫星数量等,最后计时器数据通过调节摄像头定时监控录像显示日期、时间和速度等信息,并存储于内存中,时速表以表盘的形式显示当前时速,通过设置起始速度和终止速度测量始末时间差完成加速测试[5,6].上位机基本流程是首先运行Windows系统,固定好公网IP地址,然后设置好出入站规则,如选择端口号3 388做开放测试,设置网络协议类型为TCP server,本地主机端口为3388,最后,询问是否有客户端连接,若有连接则显示客户端IP地址及端口号,继续询问客户端是否有数据进来,如果有则显示客户端数据、日期、时间等信息.下位机基本流程为先进行各个模块的初始化,设置蓝牙名为WHL,服务UUID为FFF9,特征UUID为FFF6,然后开始询问GPS、蓝牙以及GPRS是否连接成功,根据指示灯闪烁进行判断,最后GPS模块下发GPS定位信息,通过蓝牙串口发送数据包,GPRS模块通过TCP/IP协议将数据上传存储到云服务器.
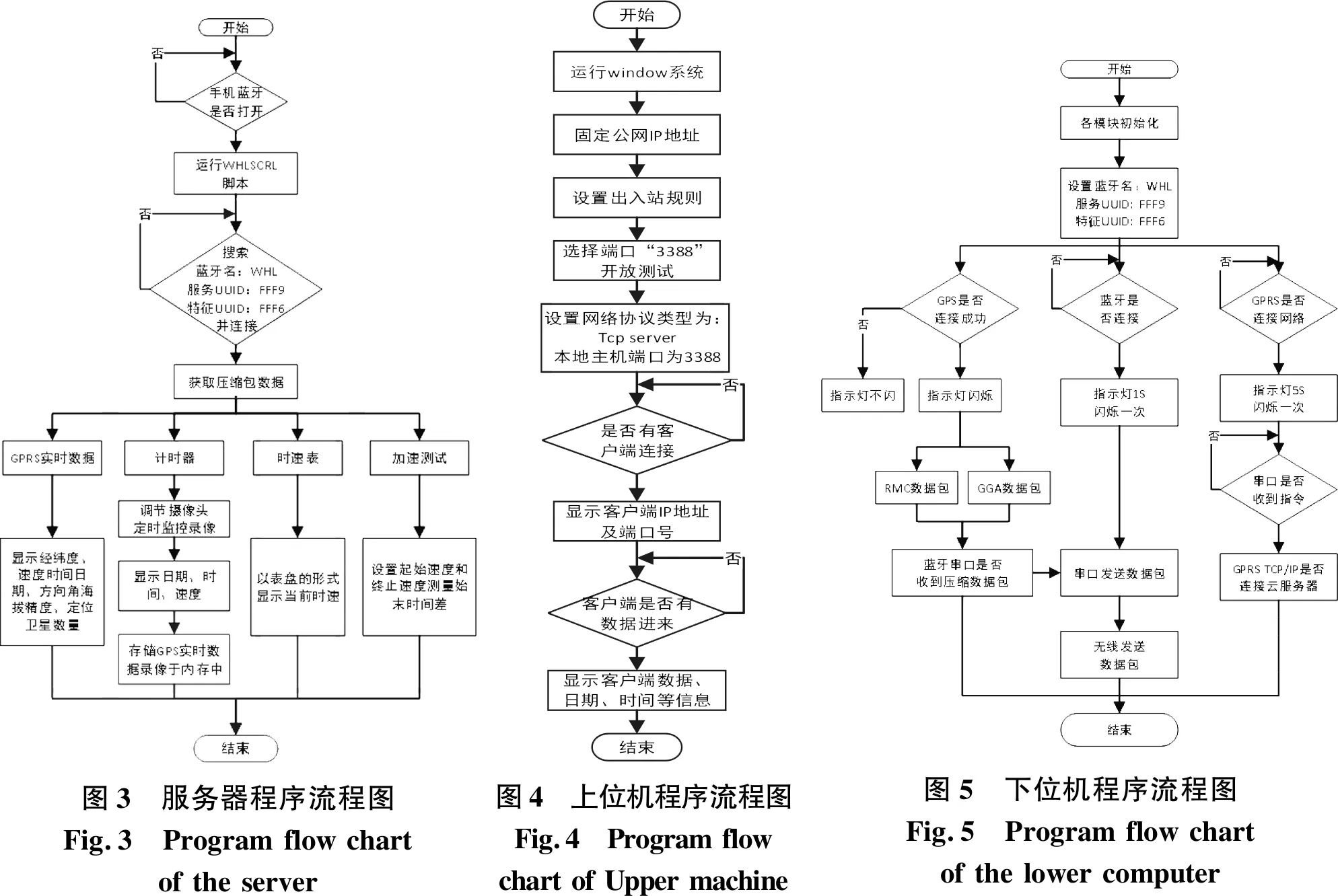
图3 服务器程序流程图 Fig.3 Program flow chart of the server图4 上位机程序流程图Fig.4 Program flow chart of Upper machine图5 下位机程序流程图Fig.5 Program flow chart of the lower computer

图6 智能出行记录系统实物图Fig.6 Physical picture of intelligent travel record system
该系统结合软硬件设计最终可实现用户对运动载体的信息管理功能,例如它能统计出每一天的移动里程、移动时间及累计移动里程;同时能记录运动载体近期的移动状态信息,即在移动过程中与实时时间相应的每分钟间隔内的平均移动速度.通过蓝牙模块可与移动端手机APP连接,实现信息可视化.通过GPS定位模块,可实时显示当前位置信息和采样时间,经纬度、海拔高其精度控制在3米以内,可做到实时定位,永不迷失.通过APP调用手机摄像头可实现视频摄录功能,将时间、位置、速度等重要信息通过水印形式在视频下方显示,做到真实记录.实物图如图6所示.
本系统创新之处在于它采用太阳能稳压清洁能源供电,响应国家绿色能源号召;与传统的手机通过蜂窝移动通信网络接收GPS数据不同,该系统采用卫星定位,最多可支持12颗,其定位方式更精确;同时兼容Android和IOS操作系统双平台,支持安卓和苹果手机使用;卫星定位信息可上传至远程云服务器进行存储,可通过PC端查看我们位于深圳的云服务器和上传至服务器的数据包,便于大数据分析处理.
3 总结
该系统主要利用卫星定位,通过蓝牙传送数据到手机APP,GPRS模块与云服务器通信,实现经纬度、速度、日期、时间等信息的实时显示和存储.此系统体积小、性价比高、实时监测,可用于汽车定位、无人机测速、轮船定航向等,实现对运动载体运动信息的全方位监测,适合个人及单位使用.
