孤岛微电网逆变器电压不平衡控制策略
2020-03-02吕文齐
金 鹏,张 春,李 智,吕文齐
(1.高端装备先进感知与智能控制教育部重点实验室,安徽芜湖 241000;2.安徽工程大学电气工程学院,安徽芜湖 241000)
0 引言
从发达国家到发展中国家,能源过度使用加速了全球不可再生能源陷入枯竭的尴尬境地.近几年来全球能源消耗保持高速增长,其中一次能源的过度燃烧会产生大量以二氧化碳为主的温室气体,对地球环境的破坏不容忽视.在节省能源和保护环境的双重挑战下,新能源发电技术得到了广泛的关注[1-2].
以新能源为主体的分布式发电方式正在逐渐兴起,为了更加有效地发挥各种分布式电源的优势和减小分布式电源对大电网的不利影响.美国首先提出微电网的概念[3-4].但是微电网系统的控制和保护面临很多问题,孤岛微电网电压不平衡问题就是其中需要解决的问题之一.目前有通过电能质量调节器将负序电压注入到线路[5-6],或者通过电能质量调节器进行电流补偿,但是这种方法会使调节器过流.微电网还可以调节逆变器输出电压的幅值和相位,调整分布式电源(Distributed Generator,DG)将有功功率和无功功率注入到微电网中,以支撑微电网电压.文献[7]提出一种加入负序电流的补偿方法,这种方法通过使线路电流变得稳定来补偿微电网电压不平衡.文献[8]提出在输出的电压控制器中加入补偿所需要的参考量来进行控制,补偿所需的参考量则需要用负序无功产生一个参考的负序电导.这种加入补偿所需的参考量来补偿DG端电压不平衡能一定程度上使微电网电压稳定.文献[9]指出电压控制器将补偿所需的参考量认为是一种扰动,加入补偿所需的参考量的方法是不可取的.文献[9]提出将补偿参考量在电压控制器前注入,从而达到补偿效果.文献[10]提出可以跟踪参考电压的不平衡系数,常用的是用一个比例积分控制器进行跟踪,但该方法建立在dq坐标系上,计算量大.本文基于αβ静止坐标系上提出孤岛微电网单逆变器电压不平衡问题的解决办法[11],采用改进的下垂控制,能有效地对下垂控制进行调节减少系统误差,同时加入基于正序电流的虚拟阻抗环,采用负阻抗能更加有效地控制微电源的输出阻抗特性,而电压电流环控制器设计采用PI调节器和PR调节器结合的方法来实现正负序电压和电流的控制.
1 系统结构及工作原理
1.1 系统结构
图1为微电网逆变器并联控制框图,其中Udc为逆变器直流母线电压,Ua、Ub和Uc分别为逆变器3相桥臂电压,ia、ib和ic为交流侧电感电流,Cf、Lf分别为滤波电容、滤波电感,Rf、Rc分别为滤波电阻和逆变器不平衡负载,Lline和Rline分别为线路阻抗.

图1 微电网逆变器并联控制框图Fig.1 Parallel control block diagram of microgrid inverter
1.2 工作原理
图2为控制结构原理图,首先对输出电压电流进行正序分离.求出所需要的正序功率,通过基于模糊PI算法改进的下垂控制获得电压信号,再经过电压电流环得到输出电压,继而控制逆变器.

图2 控制结构原理图Fig.2 Control structure schematic diagram
2 电压不平衡补偿方法
该方法建立在αβ两相静止坐标系上将大大减少计算量,采用基于模糊PI算法改进的下垂控制能有效地对下垂控制进行调节,加快动态响应速度,减少系统稳态误差.同时加入虚拟负阻抗环和电压电流环控制器对电压电流信号进行控制.
2.1 下垂控制的改进
传统的P-f、Q-V下垂控制公式为:
f=fn-m(p-pn)
(1)
V=Vn-n(Q-Qn)
(2)
式中,fn、f为微电源输出电压频率的额定值与实际值,Vn、V为输出电压幅值的额定值与实际值,Qn、Q为微电源输出无功功率的额定值与实际值,n、m为电压幅值和输出频率的下垂系数.
PI控制积分调节作用可以有效地使系统误差减小,但是精度要求高.模糊控制虽然消除系统稳态误差能力比较差,但是不需要精确地知道被控对象的数值.将PI控制和模糊控制相结合形成模糊PI控制,不但可以使系统稳态误差小,而且有模糊控制的灵活度高和适应性强等优点.模糊PI控制可以更加有效地对下垂控制进行调节,进而使动态响应速度加快,减少系统电压幅值和频率偏差,系统稳态时误差也将减少.
将方程式(1)、式(2)调整为

(3)
(4)
式中,kmp、kmI、knp和knI为修正因子.kmp、knp主要用于稳态负荷分配,kmI和knI用于消除系统稳态误差.
频率模糊PI下垂控制模块如图3所示.其中模糊推理模块为两输入两输出模块.由模糊推理得到两输入量分别为额定频率偏差ef=fn-f,以及频率偏差变化率ecf=def/dt,两输入量需先通过A/D模数转换为数字量,再由量化因子并依据模糊控制规则表,对输入量进行模糊推理,得到频率下垂系数kmp和kml的清晰量,代入式(3),得出电压合成环节的参考频率f.
同理可得,电压模糊PI下垂控制模块如图4所示.

图3 频率模糊PI下垂控制Fig.3 Frequency fuzzy PI sag control图4 电压模糊PI下垂控制Fig.4 Voltage fuzzy PI sag control
将得到的参考频率f、参考电压幅值V,通过电压合成环节处理可以得到电压电流双环控制的输入量,从而调整微电源输出的电压幅值和频率[12].
本文所设计的模糊集合相同,所以下文用kP代替kmp、knp,用kI代替kmI、knI.考虑到结构简单、应用广泛的等特点,选用三角形隶属函数.制定好一个良好的模糊控制规则表尤为重要,是系统更加稳定的前提.通过对实验数据的分析制定了如表1所示的下垂系数kP和kI的模糊控制规则.模糊控制规则设计的原则是:偏差较大时,通过减小下垂系数kI的值和增大下垂系数kP,分别达到预防出现饱和现象和提高响应速度的效果;等到快平稳时,通过增大下垂系数kI,来减少到达稳定时的误差.以此来实现输出电压和频率稳定.

表1 模糊控制规则表Tab.1 Table of fuzzy control rules
本文采用基于Mamdani原则的算法.运用“If e and ec thenkPand if e and ec thenki”的模糊控制规则.含义为:如果偏差e取PB(正大),同时偏差变化率ec取PB(正大),那么下垂系数kP取NB(负大),kI取PB(正大).其他情况以此类推.再将得到的输出变量的模糊值通过解模糊处理得到精确的输出数字量.
2.2 虚拟阻抗环
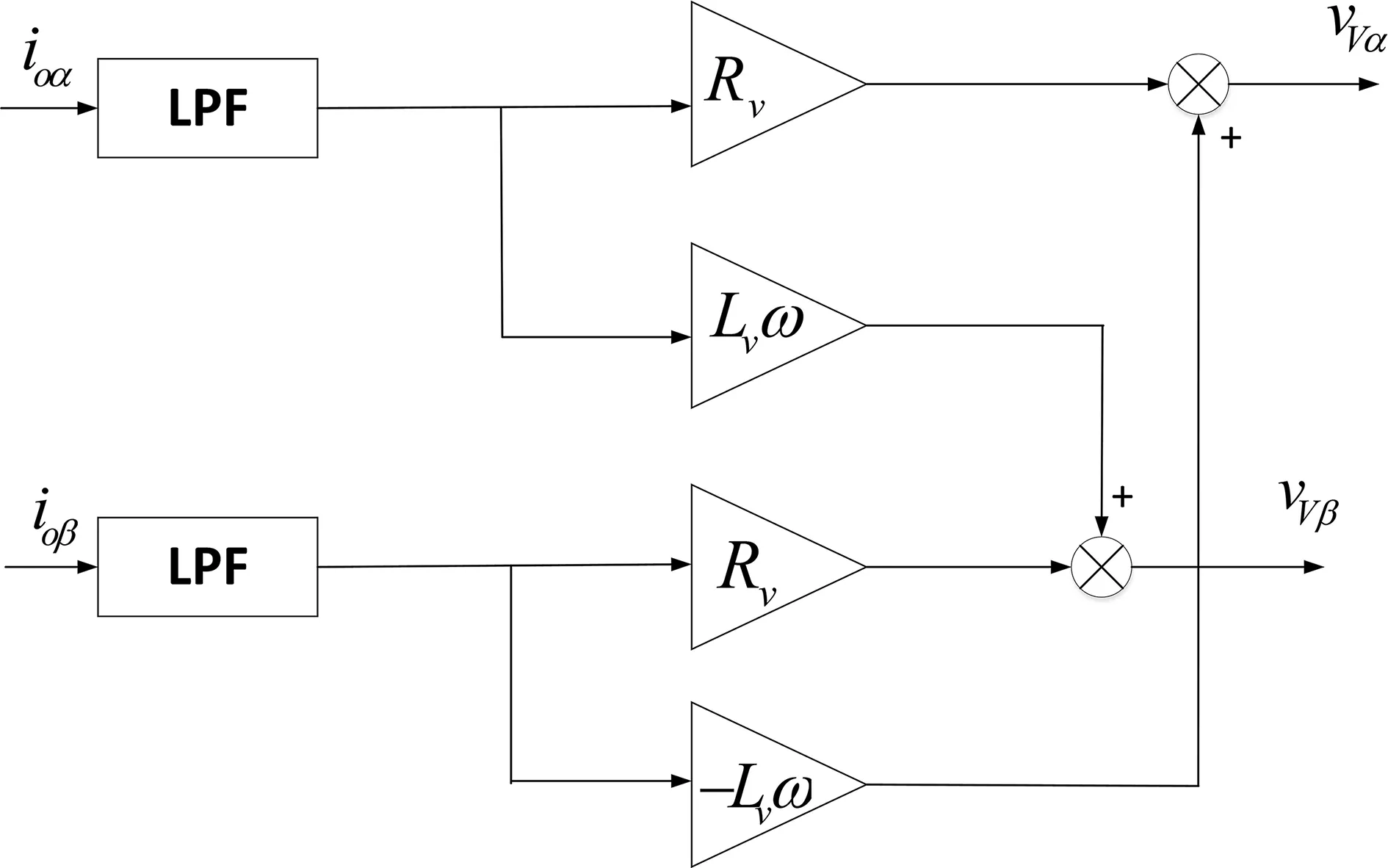
图5 虚拟阻抗环原理框图Fig.5 Schematic diagram of virtual impedance ring
在低压配电网中,如果采用P-f下垂控制策略就必须要求配电网络为阻感性网络并且同时要求有功功率和无功功率解耦.此时需要通过虚拟阻抗方法将逆变器线路阻抗和输出阻抗之和调整为以感性为主.又因为下垂控制的无功功率均分需要逆变器线路阻抗和输出阻抗满足下垂系数的比例,然而下垂系数为硬件参数,不便于修改调整.所以从系统的灵活性、适应性等方面考虑,调节总阻感比只能将逆变器输出阻抗调整为感性为主.
在传统P-f、Q-V下垂控制中加入虚拟阻抗以适应于阻性线路,本文运用负阻抗,最终的电压是原电压减去输出电流在虚拟负电阻上的压降,用算法模拟出虚拟负阻抗作用;这样就可以用算法去模拟虚拟负阻抗,接着减小虚拟阻抗的取值以及用虚拟阻抗消除一部分线路电阻来提高电压质量.虚拟负阻抗环原理图如图5所示.
因为虚拟负阻抗没有功率消耗,所以会使得下垂控制更加稳定.图5方程表示为:
vVα=RViOα-LVωiOβ
(5)
vVβ=RViOβ+LVωiOα
(6)
式中RV、LV为虚拟电阻、电感.
2.3 正负序分离及功率计算
将逆变器电流信号、输出电压变换到αβ坐标下.记Tαβ为abc坐标到αβ坐标系下的变换矩阵,T+、T-分别为αβ坐标系下正负序的变换矩阵;变换公式为:
(7)
(8)
(9)
(10)
(11)
通过正负序分离获得两相正交电压信号,可以实现对输入电压信号进行正负序分离.
2.4 电压电流环控制器设计
微电网受不平衡负载影响时,系统的动态性能和稳定性受负荷电流分配以及各逆变器的端口电压不平衡度影响.因本文基于αβ静止坐标系下,所以采用PI调节器和PR调节器结合的方法来实现正负序电压和电流的控制,实现零稳态误差.控制框图如图6所示.

图6 电压电流双环控制框图Fig.6 Voltage current double loop control block diagram

PR电压、电流控制器传递函数为[13]
(12)
其中:kcp、kcr分别是电流环调节器的比例系数和谐振系数;ωc是电流环谐振控制器剪切频率、ω0是电流环基波频率.

3 仿真验证
利用matlab/simulink仿真平台构建逆变器的仿真模型,验证本文控制方法有效性.如图1所示不平衡负载Rc取值为30 Ω,跨接在BC两相之间,3相平衡负载R作为逆变器的公共负载,R=50+j16 Ω.
3.1 加入不平衡负载时逆变器输出电压和电流
在仿真实验开始不加入不平衡负载,在t=0.2 s时加入不平衡负载.可以看出在仿真模型未加入不平衡负载时电压和电流波形和在0.2 s后加入不平衡负载后的电压和电流波形.如图7所示,加入不平衡负载后的电压电流波形不平衡度达到了8.9% ,超出了电压不平衡度的限制范围.

(a)电流波形(b)电压波形图7 加入不平衡负载时逆变器输出电流和电压波形Fig.7 The inverter output current and voltage waveform when unbalanced load is added
3.2 增加电压不平衡控制
图8为增加电压不平衡控制情况下逆变器输出电流和电压波形.由图8可知加入本文提出的不平衡控制方法后,虽然在0.2 s加入了不平衡负载,但是逆变器输出电压波动很小,保持在2%以内.不平衡负载的加入并没有影响系统的稳定.

(a)改进后的电流波形(b)改进后的电压波形图8 增加电压不平衡控制情况下逆变器输出电流和电压波形Fig.8 Increase the output current and voltage waveform of inverter under unbalanced voltage control
在t=0.2加入有不平衡负载的情况下,由图7可知不加入电压不平衡控制时电压电流出现了一定的波动,逆变器输出电压处在不平衡状态.加入电压不平衡控制后如图8所示电压电流波动极其微小,系统保持稳定.可以看出本文提出的电压不平衡控制策略的有效性.
4 结论
本文针对微电网孤岛运行时因不平衡负载而导致的电压不平衡问题,采用了一种微电网逆变器不平衡补偿方法对DG端的电压进行补偿.通过仿真实验可以看出该方法对不平衡负载引起的电压不平衡有很好的控制作用.但是,该方法仅仅针对带线性负载造成的电压不平衡进行了讨论,对带非线性负载还需要进一步探讨.
