MUX-100DJ移动DR故障分析及处理三例
2020-03-01喻志才蒋元林
喻志才,蒋元林
解放军第903医院 医学工程科,浙江 杭州 310013
引言
MUX-100DJ 移动DR 是岛津公司生产的一款质量稳定、成像清晰的移动X线机。它主要由主机、立柱、球管、准直器、高压发生器、驱动电机和成像系统等组成。该机由于使用年限长,机械磨损、早期设计缺陷等因素引起的故障主要表现在立柱、马达和灯丝电路,现就其日常使用中的几例高频率故障分析和处理做具体分析和总结。
1 MUX-100DJ移动DR基本工作原理
1.1 MUX-100DJ移动DR主机电路分析
该主机的内部结构主要包括主控板NEXSC-MUX、电路板MUX CHARGE-99、通信控制板X CONT-2008、逆变器板INVERTER UNIT-C1、电源板MUX POWER-99、马达驱动板MUX DRIVER-07 等[1]。其中,各主要电路板的功能介绍如下:主控板NEXSC-MUX 板控制整机工作的主CPU 板;通信控制板XCONT-2008 主要功能是输入/输出电路,传送数据给NEXSC-MUX 板,管电流和管电压的测量和反馈,测量管电压过载检测,IGBT 驱动控制,灯丝加热驱动控制,充电控制等;逆变器板INVERTER UNIT-C1包括IGBT 主电路和灯丝加热电路及电流启动等;充电检测电路板MUX CHARGE-99 主要检测电池电压、电流、充电错误;电源板MUX POWER-99 功能包括电源的开/关、电源的控制、电池电压的检测;马达驱动板MU DRIVER-07主要驱动控制马达的前后运动及机械相关联锁[2]。
1.2 MUX-100DJ移动DR机械臂部分工作原理
该设备采用滑轨式立柱和可伸展式支撑臂结合实现球管的上下、前后、左右移动。当设备通电后按下“管球臂移动”按钮,通信控制板XCONT-2008 接收解锁信号,将12 V 电压输入立柱及支撑臂上的电磁铁,进而实现解锁定位[3]。触发解锁按钮后,可实现立柱左右移动、球管臂上下移动。
2 常见故障案例与分析
2.1 故障1:管球横臂行走速度故障
2.1.1 故障现象当按下“管球臂移动”按钮时管球臂不能抬起,并且设备行走速度缓慢。
2.1.2 故障分析
当按下管球臂移动的按钮后,管球臂的锁定电磁阀应当立即释放,此时管球臂不能抬起,可能是电磁阀没有动作。
2.1.3 故障检修过程
(1)观察故障出现时的机器状况。首先我们可以在按下“管球臂移动”按钮时仔细听电磁阀的声音,本机未听到管球臂锁定释放电磁阀的动作声音。其次察看条件显示设定面板,发现在管球锁定状态时面板正常显示,缩光器前指示灯亮蓝灯(正常状态下管球臂锁定时两者应该处于无任何显示的状态)。
(2)根据机器显示的状态初步确定故障原因。通过结合以上两项检查可判断故障是由于管球臂未插好。可实际管球臂的锁定栓已完全插入到管臂连接部分的锁定装置内。打开管臂连接部分拆除遥控器接收部的外壳,就可以看到管球臂锁定机构。里面有一个限位开关SW4(上面有一个小铁片和它连接使SW4 处于常开状态)和一个电磁铁(有一个钩子和它连接)。当球管臂的锁定栓插入到管臂连接部分时会碰到SW4 的小铁片,使SW4 变为常闭状态,这时设备就认为管球臂已收好。而这台故障设备的SW4 的小铁片由于多次撞击位置太靠下,所以当球管臂的锁定栓插入到管臂连接装置内时未使SW4 变为常闭。所以在按下“管球臂移动”按钮时管球臂不能抬起(电磁阀的钩子无法脱开)。
(3) 分析导致机器行走缓慢的原因。如果管臂没被锁定,设备会自动选择缓慢移动模式,系统的移动速度将限制为大约正常速度的一半[4]。在这种情况下,驱动辅助的力量限制约为正常的一半。
(4)故障处理方法。处理此故障非常简单,拆除遥控接收部分然后在SW4 的小铁片缠绕一定厚度的绝缘胶带或用扎带固定,让其保证横臂锁定时能使SW4 处于闭合状态,机器可恢复正常。
2.2 故障2:机器开机或准备状态下报故障代码“F32”或“F33”
2.2.1 故障现象
MUX-100DJ 开机起初,在READY 时偶尔出现“F32”或“F33”,后来出现的频率越来越高,现场偶尔能闻到轻微的焦味。该机器软件每隔800 ms 检测一次,在准备状态下每隔400 ms 检测一次灯丝电流,如果仪器测得的灯丝电流约为1 A 或更小时即比预设值低50%以上就会报“F32”或“F33”错误[5-6]。因此,可将故障定位在灯丝加热电路或灯丝检测电路两大部分。
2.2.2 故障分析
通过查看岛津的服务手册了解到“F32”是指实际球管灯丝电流小于设定的50%,“F33”是指灯丝电流小于1 A。现场能闻到轻微焦味,故需要打开和球管灯丝电流相关的通信控制板XCONT-2008 和逆变器板INVERTER UNIT-C1进行确认。
2.2.3 故障检修过程
观察到INVERTER UNIT-C1 上的电阻R5、R8、R15和R25 这几个电阻有烧毁的痕迹(图1)。
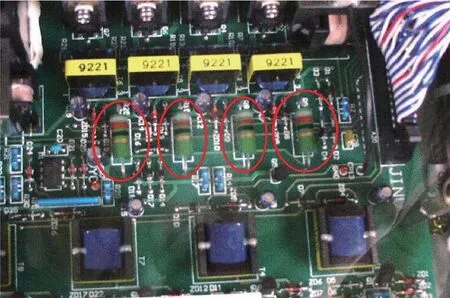
图1 烧坏的电路实物图
分析周边电路(图2),可以计算R25(LF 1/4 82.5 F)的功率,应该不低于2 W。但是实际上这几个电阻的阻值如图中的标示为1/4 W,INVERTER UNIT-C1 板上的电阻R5、R8、R15 和R25 设计功率不足因此造成慢慢地烧毁。用几个较大功率的电阻更换之后机器没有再出现故障。
2.2.4 故障小结
这种故障频率从低到高的现象很多情况可能是因为器件的老化引起[7],有可能是使用的原件功率不够引起的现象,可以分析工作原理后适当加大元件参数进行改善。
2.3 故障3:机器报“d1”错误代码。
2.3.1 故障现象
MUX-100DJ 机器出现“d1”报错,且机器推动行驶比较困难。
2.3.2 故障分析
MUX-100DJ 出现“d1”报错,查故障代码手册知“d1”表示行驶马达过流。机器检测到过电流,可能有以下三种情况。
(1)在小于0.8 km/h 低速行驶条件下检测到马达电流超过6 A,时间上超过10 s。
(2)在超过0.8 km/h 高速行驶条件下检测到电动机电流超过8 A,时间上超过10 s。

图2 电路原理分析图
(3)其中一个左右直流电机存在缺陷。
可以在马达驱动板MU DRIVER-07PCB 上的CP5(左电机)和CP19(右电机)上检查电机电流。当未驱动直流电机时,两个检查引脚OFFSET 电压均为0,关系为0.2 V/1 A[8]。因此,当上述检查引脚的电压在低速驱动条件下超过约1.2 V 时,错误“d1”可能发生。上述检查引脚的电压由V/F 转换器转换为频率。当该脉冲信号的积分值达到“6 A 或8 A 持续10 s”时,出现错误“d1”,可以通过检测两个检查引脚的电压,判断哪个直流马达有缺陷。如果两个检查引脚的电压都正常,则马达驱动板MU DRIVER-07 PCB 或通信控制板XCONT 2008 PCB 可能有缺陷[9-10]。但直流电机之一仍有可能出现故障。
此时,需要考虑与马达运动相关的部件主要电源控制板MUX POWER-99、马达驱动板MU DRIVER-07以及刹车、驱动电机[11]是否运行正常。
2.3.3 故障排除过程
打开左右侧盖,我们先测量MUX POWER-99 板+120 V和-120 V 是否有输出,根据电路图,找到MU DRIVER-07板CN15 接头,当手握推车把手前后推拉机器时,CN15的1、2 和3、4 端子分别有±125 V 左右,由此确定MUX POWER-99 输入到MU DRIVER-07 板电压正常[12]。为了确定是MU DRIVER-07 板的问题还是驱动电机的问题,我们需要检测MU DRIVER-07 板CN14 和CN16 输出到驱动电机电压和驱动电机线圈阻值。拔出CN14 和CN16 端子,测量后发现输出电压异常,而左右马达线圈阻值也均在11.5 Ω 左右且正常。但机器代码明确指出马达电机过流,因此,首先需要分析马达问题。
MUX-100DJ 有左右各一个马达,在用万用表测量两个马达的线圈阻值都正常,且现场又没有新马达可以更换确认是否为马达不良的情况下,考虑到一般两个马达不会同时损坏,我们可以用交换法处理,具体方法如下。
(1)用万用表测量左右马达的线圈是否良好,如果线圈开路,可以确定马达故障;如果线圈良好,则需进行下一步检查。我们假设右侧马达不良:① 操作机器前,先拔下左侧马达插头CN14,出现“d1”,可能是右侧马达不良,随后插入左侧马达插头CN14,拔下右侧马达插头CN16,操作机器,此时不会出现“d1”;② 拔下左侧马达插头CN14 和右侧马达插头CN16,把左侧马达插头CN14 插入MU DRIVER-07 板的CN16,操作机器,此时可能不会出现“d1”,拔下左侧马达插头CN14,把右侧马达插头CN16 插入MU DRIVER 板的CN14,操作机器,如果此时出现“d1”,我们可以断定右侧马达不良。
(2)如果左侧马达不良,情况与上面相反,可参照分析。(3)应急解决法。同时拔下左侧马达插头CN14 和右侧马达插头CN16,此时操作机器不会出现“d1”,在平坦的路面移动机器,没有马达助力的情况下推机器会觉得比较重。
(4)引起该故障的原因是该款设备使用的是有刷马达。长期的使用使碳粉磨损,导致马达线圈短路引起马达过流,解决的办法是对马达进行清洁除碳。
3 讨论与总结
岛津MUX-100DJ 型移动式DR 是一款比较智能的成熟的机器,故障率比较低,它具有很强的自检和故障自诊断功能。在维修该机时,首先,要查阅故障代码,清楚各个代码所对应的意义,实行精确的点对点处理[13];其次,要结合故障现象运用观察法、静态测量法、在线测量法、替换法、原理分析法等,结合该机工作原理电路图和机器构造,实现故障的粗略和精细查找相统一[14];最后,当怀疑电路缺陷替换或更改电路元件时,必须通过电路运算,得到确切的参数才能更改,不能盲目替换或更换元器件,以免扩大故障或损坏机器。
以上三例故障主要由元器件老化、使用磨损、缺乏维护保养等因素引起的。医疗仪器故障出现后,在能够精确快速解决的情况下,行业工作者更多的是需要结合周期性、预防性维修工作[15],特别是在仪器故障发生前对中大型医疗仪器定制详细的周期性、预防性维修计划(该工作包含目前各大医院推行的计量和质量控制检测)。只有做到像每架飞机起飞前后都必须强制性检测维护保养一样的全寿命闭环质量控制,我们的现代化医疗设备的管理和维修工作才算真正做到了实处[16]。
