基于CAN和LabVIEW的风机在线监测系统
2020-02-26崔志新陈学军
崔志新,陈学军,沈 军
(1.福州大学机械工程及自动化学院,福建福州 350000;2.莆田学院机电工程学院,福建莆田 351100)
0 引言
21世纪以来,由于世界经济的繁荣发展,人口持续增长,人们对能源的需求量也呈现出爆发式增长,而传统的化石能源逐渐枯竭再生困难,可再生能源越来越受到政府和企业的重视[1-2]。风能作为可再生能源发展迅速,但由于发展过于迅速也导致风机在线监测与故障诊断技术跟不上步伐。当风力发电机组出现故障时,不能被及时发现并做出有合理的应对措施,往往导致机组出现更大的损伤甚至报废,增加企业的运行成本,给风电场造成巨大损失。因此,一套实时、有效的在线监测和诊断系统对风力发电机而言尤为重要[3]。
传统的风机在线监测系统在多点监测和远距离数据采集与传输方面存在缺陷,如传统的RS232,其缺点是可靠性差、传输速率低及检错能力不强[4],不能满足风机的在线监测需求。对于一个机械设备的多点监测系统,要实时地传输大量的数据,一套可靠的、完整的数据通信系统必不可少[5]。
CAN总线校验能力强及可靠性高[6],可实现远距离传输和多点串行通讯。提出将CAN总线技术应用于风机的在线监测系统,并结合LabVIEW进行数据实时显示和分析。本系统分为上位机与下位机2部分[7],下位机以STM32F103ZET6单片机为核心,包括传感器、信号调理模块、ADC模块、CAN模块和USB-CAN适配器;上位机以PC机为核心,监测软件通过CAN采集接收数据信号、分析处理,进而实时、准确地显示风机运行工况。
1 监测系统的整体框架设计
基于CAN和LabVIEW的风机在线监测系统由上位机和下位机2部分组成。系统的整体机构框架设计如图1所示。
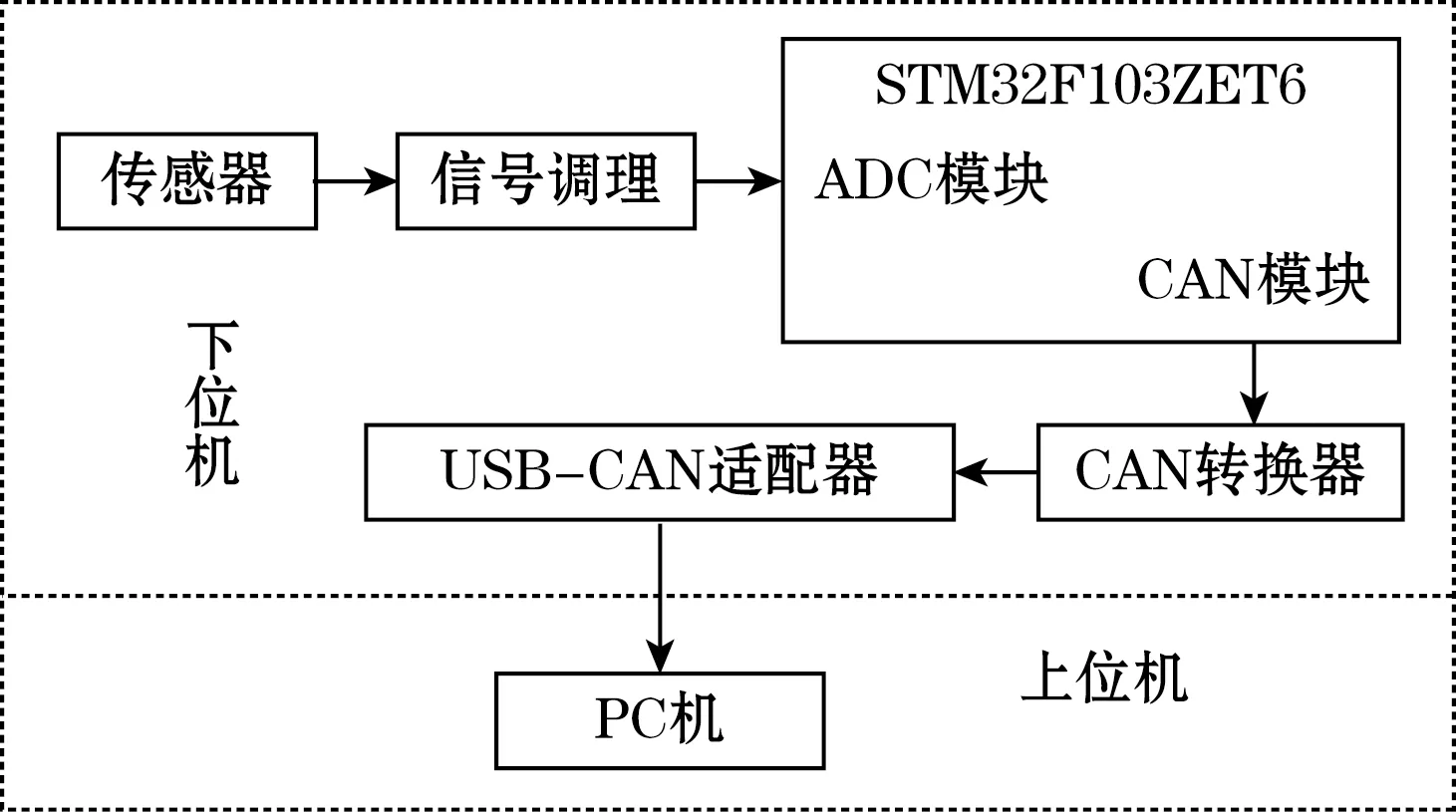
图1 监测系统组成框图
下位机主要完成数据采集,并对其进行信号预处理和数据传输。它包括传感器、信号调理模块、ADC模块、CAN模块和USB-CAN适配器。上位机实现的是采集数据的终端显示和分析,监测运行状态。
对于风力发电机组,这里采集的是机组振动信号,选用压电式加速度传感器,将采集的风力发电机组的振动信号接入信号调理电路,对其进行初步滤波和调压,使信号满足A/D采样范围。利用STM32F103ZET6的A/D转换模块将采集到的模拟信号量转换为数字信号量,通过CAN总线传输至上位机。上位机软件基于LabVIEW实现,其主要完成数据接收、显示以及对采集的信号进行分析处理。
2 监测系统硬件设计
2.1 信号调理电路设计
由于风力发电机组的工作环境较复杂,在对机组振动信号采集时会受到干扰,且传感器的输出信号一般也不能满足A/D采样范围。因此,需要对传感器输出信号进行预处理,信号调理电路图如图2所示。

图2 信号调理电路图
2.2 电源电路的设计
电源电路设计中用到2个稳压芯片:AMS1117-1.8和AMS1117-3.3。AMS1117-3.3为3.3 V稳压芯片,给外部接口提供+3.3 V电源,AMS1117-1.8是1.8 V稳压芯片,主要为CPU内核供电。电源电路图设计如图3所示。


图3 电源电路图
2.3 CAN总线接口电路设计
STM32F103ZET6中的CAN接口称为brCAN(基本扩展CAN),它支持CAN2.0A和CAN2.0B协议[6]。为此,只需要连接一个CAN总线收发器就可以实现通信。系统选用的收发器为TJA1050,这样做的优点是简化了接口电路的设计,增强了系统的稳定性,可以在复杂的环境下进行数据传输。硬件接口电路如图4所示。

图4 CAN总线接口电路图
主控芯片上的CAN TX及CAN RX与CAN总线收发器上的D及R相连接。另外,要在传输线两端并联一个120 Ω的电阻,这样可以减小传输过程中的信号反射[7-8],提高稳定性。同时CAN总线上可以悬挂多个节点,实现多点通讯。
3 监测系统的软件设计
3.1 CAN通讯模块程序设计
STM32F103ZET6内部自带CAN控制器,只需对其发送或接收数据的邮箱和控制寄存器进行正确的配置,即可实现CAN控制器与上位机之间的通讯。
设定CAN的通讯速率为500 Kbit/s,扫描时间为2 ms,CAN通信协议使用的是ISO11898标准[9]。在CAN协议中数据帧和遥控帧分为标准帧模式及扩展帧模式,标准帧格式有11位的标识符(ID),扩展帧格式有29位的标识符[10]。在本系统中采用标准帧格式,一帧发送8个字节的数据到上位机。CAN的工作模式设置为正常模式,过滤器组的工作模式设置为屏蔽位模式。CAN模块的程序主要包括3部分:首先初始化,完成工作模式、波特率、滤波器组等相关控制寄存器配置;其次,发送接收消息,库函数中有提供相关函数,可以直接调用;最终,CAN状态获取,即确认是否发送或接收成功,也可以在库函数中调用相关函数。CAN通讯模块的程序流程图5和图6所示。

图5 CAN发送数据程序流程图

图6 CAN接收数据程序流程图
3.2 上位机程序设计
LabVIEW图形化编程语言简单明了,官方提供的库函数里面有大量的数字信号标准处理函数,利用LabVIEW中的数据链接库(DDL)结合USB-CAN适配器厂家提供的接口函数,实现上位机程序的开发,可以缩短软件的开发周期[11]。
上位机程序首先要判断USB-CAN适配器是否连接到上位机。若连接正常,则初始化USB-CAN配置,接着打开CAN接收,对接收到的信号进行分析处理。其先对CAN数据包进行解包分析,然后对信号进行实时波形分析、时域分析、频域分析等,进而得出风机的运行状况。其程序流程图如图7所示。
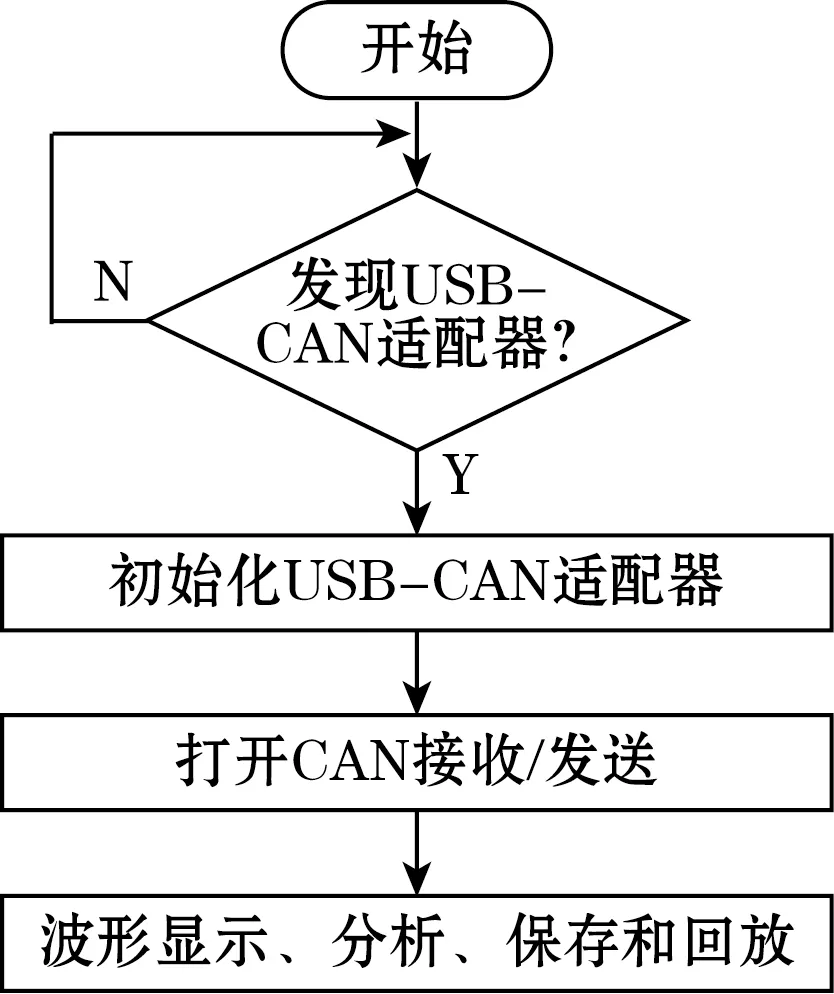
图7 上位机程序流程图
运用LabVIEW编写的上位机程序前面板总界面主要有两大板块:菜单栏板块和功能操作板块。菜单栏板块包括设备型号、设备参数、参数设定等,在菜单栏板块中可以调节波特率和扫描时间等参数;功能操作板块由系统监测、回放分析和退出系统组成。总界面图如图8所示。

图8 总界面图
4 实验分析
为了验证所设计的基于CAN和LabVIEW的风机在线监测系统,搭建简易实验平台如图9所示。

(a)传感器安装位置

(b)整体场景图
启动鼓风机模拟风机正常运行现场,然后打开上位机监测系统总界面。在菜单栏板块中设置设备的相关参数,如本次实验中选取通道2,波特率设置为500 Kbit/s,扫描时间为2 ms。参数设置完成后,点击系统监测进入监测系统界面,然后点击开始监测,监测运行效果界面图如图10所示。
图10中的实时趋势图,表明风机运行趋势总体平稳,不会出现波形突变。时域波形图和频域波形图表明风机的运行频率正常,无频率突变;波形指标、峭度指标、裕度指标,在极小范围内波动,说明风机正常运行。根据图10中的波形图和数据得出风机当前运行状况是正常的,符合模拟的实验现场情况。
若保存数据,则点击停止监测,接着点击数据保存;若退出监测系统,则点击退出,返回总界面。另外,回放分析界面将会对保存的数据进行回放,其界面图如图11所示。

图11 回放分析界面
5 结论
文中提出了基于CAN和LabVIEW的风机在线监测系统,分为硬件部分和软件部分,分别对其进行设计。硬件部分采用模块化的设计结构,电路更简洁明了,有利于后期的系统升级。软件部分主要利用CAN总线技术对数据进行实时、快速的接收和发送,然后对采集到的数据进行分析处理。上位机采用LabVIEW图形化编程语言[11],完成了系统总界面、监测系统界面和回放分析等功能。实验结果表明,该监测系统能够实时地监测风机运行状况。在风机出现故障时能快速、及时地反馈至上位机,将为风机在线监测与故障诊断奠定基础。
