低侧向效应MEMS压阻式加速度传感器
2020-02-26王明武梁应选
王 鹏,杨 帆,王 楠,王明武,梁应选
(陕西理工大学机械工程学院,陕西省工业自动化重点实验室,陕西汉中 723000)
0 引言
MEMS压阻式加速度传感器是利用半导体的压阻效应,当有外界加速度输入时,传感器敏感元件的梁结构会发生变形,进而产生应力输出,该应力会导致传感器的压敏电阻阻值发生变化,进而实现加速度信号的测量。最早的MEMS压阻式传感器是由美国斯坦福大学Rolyance[1]等人研制成功的,其结构为单悬臂梁-质量块结构。而在后来的几十年时间里,各种各样的梁-质量块结构的MEMS加速度计被研制成功,其中包括双梁质量块[2]、十字梁[3]以及复合多梁[4]等结构。
目前,压阻式加速度传感器的研究工作主要围绕着转换元件和敏感元件展开:一方面是通过将新材料和新技术引入到转换元件的研究中,如太原理工大学研制的基于GaAs介观压阻效应的压阻式加速度传感器和西安交通大学赵玉龙等人研制的基于非晶态碳膜的高g值加速度传感器[5-6];另一方面则注重对传感器的敏感结构进行研究,通过设计不同的力学结构,从而得到不同量程、灵敏度、固有频率的传感器,并通过结构设计优化提升传感器的各项性能。在某些特殊环境下,加速度信号组成较为复杂,例如机床主轴振动测试系统,可能有多方向加速度信号同时施加到传感器,这就要求设计的传感器具有较低的横向效应。压阻式加速度传感器的横向交叉干扰主要是由梁质心与检测质量块质心的高度不同而引起的。因此在目前的研究中,大多学者通过减小传感器质量块与梁的质心高度距离来降低传感器横向交叉干扰,如上述文献中的鲍敏航等人研制的平面内加速度传感器。印度理工学院Sankar等人通过在质量块上镀金,成功研制了具有极低横向交叉干扰压阻式加速度传感器,减小了梁质心与质量块质心的距离,有效地限制了传感器的横向交叉干扰[7]。另外,一些学者则通过增加敏感结构的横向刚度来降低传感器的横向交叉干扰,如双桥结构传感器,通过将悬臂梁置于质量块的四角上,拉大了梁中心线与质量块中心线的距离,从而有效地限制了传感器的横向交叉干扰[8]。西安交通大学赵玉龙等人提出了一种具有梁膜结构的加速度传感器,在传统单悬臂梁-质量块结构基础上增加了膜结构,在一定程度上增加了传感器横向刚度,降低了传感器的横向灵敏度[9]。在目前的研究中,大多学者通过减小传感器质量块与梁的质心高度距离或者增加敏感结构横向刚度来降低传感器横向交叉干扰。但是很少有研究能彻底消除传感器的横向交叉干扰,因此如何从理论上消除横向加速度对于传感器的影响成为高性能传感器研究中的技术难点之一。
1 压阻式加速度传感器的横向交叉干扰
横向交叉干扰是当横向加速度作用于传感器敏感结构时,梁结构产生扭转造成的,图1为梁-质量块结构示意图,其质量块质心与梁质心之间的距离d可以表示为
(1)
式中:hm为质量块的厚度;hb为敏感梁的厚度。

图1 传感器侧向干扰模型
当横向加速度ac作用于传感器时,质量块的惯性力将会使梁结构产生扭转,并引起一个力矩Mc,如式(2)所示:
(2)
设Kx为结构x方向的扭转刚度,Ky为结构y方向的扭转刚度,那么在横向加速度作用下质量块绕x轴的转角θx和绕y轴的转角θy可以用式(3)表示[10]:
(3)
由式(3)可知,传感器在受到非敏感方向加速度作用下,其输出应力由2方面决定,一是传感器的横向扭转刚度;二是质量块质心与梁质心之间的距离,增加传感器的结构刚度或者减小质量块和梁质心的距离都有助于减小传感器的横向交叉干扰。然而无论如何,由于现有MEMS加工工艺的限制,不可能使传感器结构受到非敏感方向加速度作用下的应力输出为0。前文已经对目前降低传感器横向交叉干扰的研究进行了分析,基本上都是尽可能地降低传感器结构受到非敏感方向时的应力输出,而无法彻底消除横向交叉干扰。
压阻式加速度传感器的原理是当敏感方向加速度作用在传感器敏感结构上时,布置在敏感梁上的压敏电阻阻值发生变化,使得传感器信号检测电路产生一定的输出,也就是说传感器的输出是由2部分所决定的,一部分是结构变形区域的应力值大小,一部分是惠斯登电桥的输出特性。从前文的研究可以看出,无论结构怎么变化,其受到非敏感方向加速度作用下应力输出都不可能为0,因此本文拟采用惠斯登电桥的输出特性和敏感梁上的应力分布特点来优化传感器信号检测电路,以达到减小甚至消除传感器的横向交叉干扰的目的,图2为典型的惠斯登全桥电路。
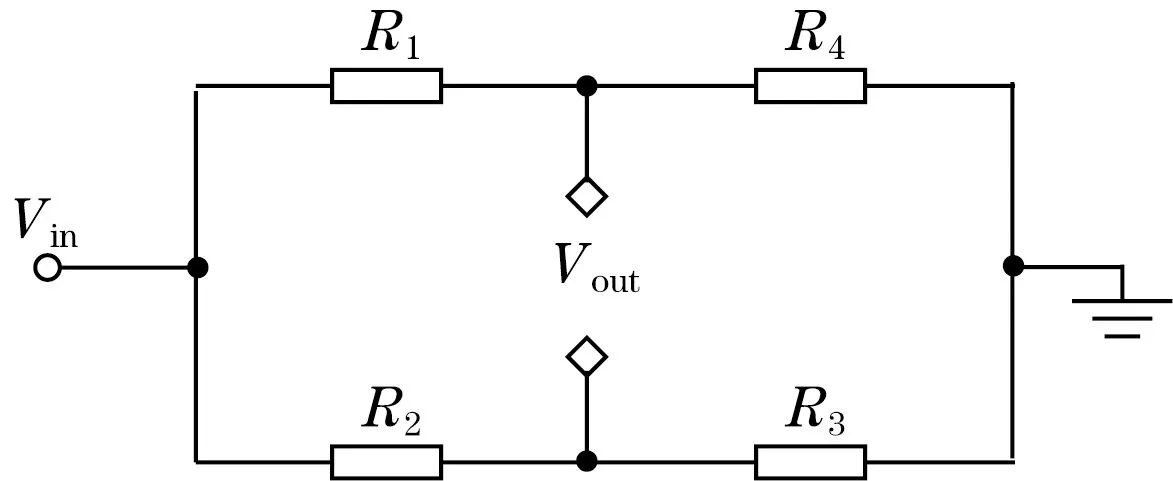
图2 惠斯登全桥电路
图2中,R1、R2、R3、R4为传感器的4个压敏电阻,假设ΔR1、ΔR2、ΔR3和ΔR4分别为4个压敏电阻的变化值,对于MEMS加速度传感器来说,R1=R2=R3=R4=R,|ΔR1|=|ΔR2|=|ΔR3|=|ΔR4|,当惠斯登电桥的4个电阻发生变化时,其输出公式为
(4)
分析式(4)可得到当以下情况发生时,惠斯登电桥的输出均为0:
(1)当4个压敏电阻的变化量大小相等,方向相同时,等式成立,惠斯登电桥的输出为0;
(2)当ΔR1=-ΔR3和ΔR2=-ΔR4时,即惠斯登电桥对角线上的电阻变化大小相等,方向相反时,等式成立,惠斯登电桥输出为0。
通过以上的研究和分析发现,合理地利用惠斯登电桥的输出特点,通过将电阻排布在合适的应力区域,可以使惠斯登电桥的输出为0,从而达到消除传感器横向交叉干扰的目的。
2 传感器芯片设计
传感器芯片的设计主要包括敏感结构和信号检测电路的设计,其中敏感结构设计主要取决于应用场合对于传感器的性能指标要求,而信号检测电路的设计是保证传感器能顺利输出电信号的关键。
2.1 传感器敏感结构设计
图3为传感器芯片示意图,4根支撑梁沿着质量块短边对称分布,4根敏感梁沿着质量块长边对称布置,8根梁共同支撑检测质量块,4根敏感梁上均有1个阻值相同的压敏电阻,4个压敏电阻通过金属引线连接成传感器的信号检测电路,当敏感方向加速度作用于传感器芯片时,弹性元件在中央质量块惯性力作用下发生变形,进而在各梁上产生应力。此时,由于小梁的长度和宽度均小于大梁,在末端相同位移的情况下具有更大的变形应力,从而有效地改善了传感器灵敏度与固有频率之间的矛盾关系。同时由于八梁结构本身对于传感器的横向交叉具有较好的抑制能力,因此适合作为本文传感器的敏感结构。传感器的结构尺寸为检测质量块的尺寸,选为(长×宽×高) 3 000 μm×2 500 μm×380 μm,敏感梁和支撑梁的尺寸(长×宽×高)分别为250 μm×110 μm×22 μm和400 μm×120 μm×22 μm[11]。
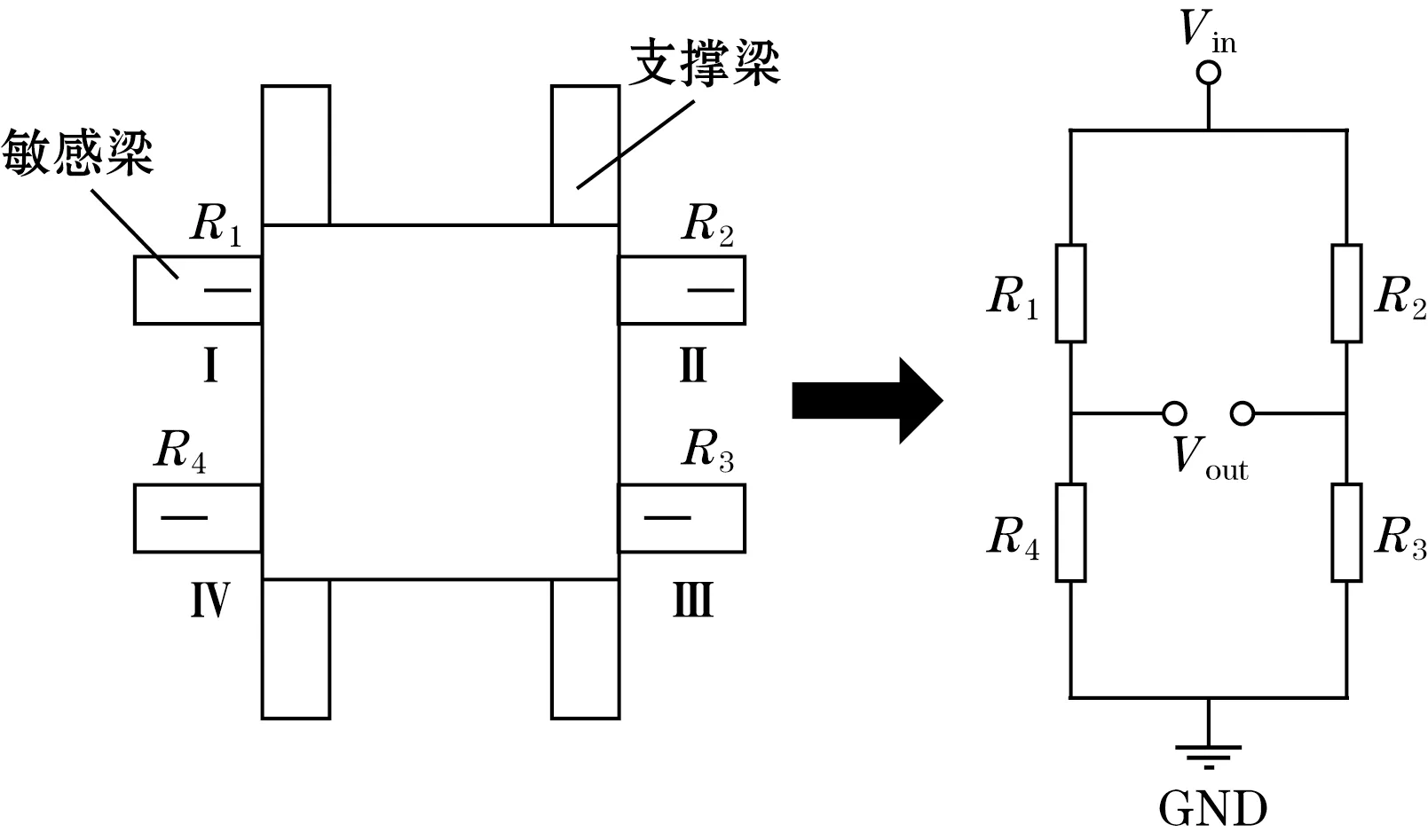
(a)八梁结构(b)电阻排布图3 传感器的芯片示意图
2.2 FEM仿真
本小节将采用有限元分析中的模态分析和静态分析等方法分别对传感器敏感梁上最大应力以及固有频率进行仿真,验证传感器尺寸设计的合理性。仿真分析过程中的参数设置为:材料弹性模量设置为1.66×1011N/m2(硅材料的弹性系数),材料密度设置为2 331 kg/m3(硅材料的密度),材料泊松比设置为0.278(硅材料的泊松比),建模和分析过程均采用全命令流(APDL)的方式实现[12],分析过程主要为静态分析和动态分析。静态分析主要分析结构在受到一定加速度作用下敏感梁上的应力分布,图4为z向100g加速度作用下复合八梁结构传感器芯片的应力分布图。由图4可以看出,复合八梁结构敏感梁上最大应力为21.1 MPa,未超出硅材料屈服极限。有限元分析软件中的模态分析可有效地对传感器敏感结构的动态特性进行评估,表1为传感器敏感结构的前四阶固有频率。其中一阶固有频率为15.004 kHz。
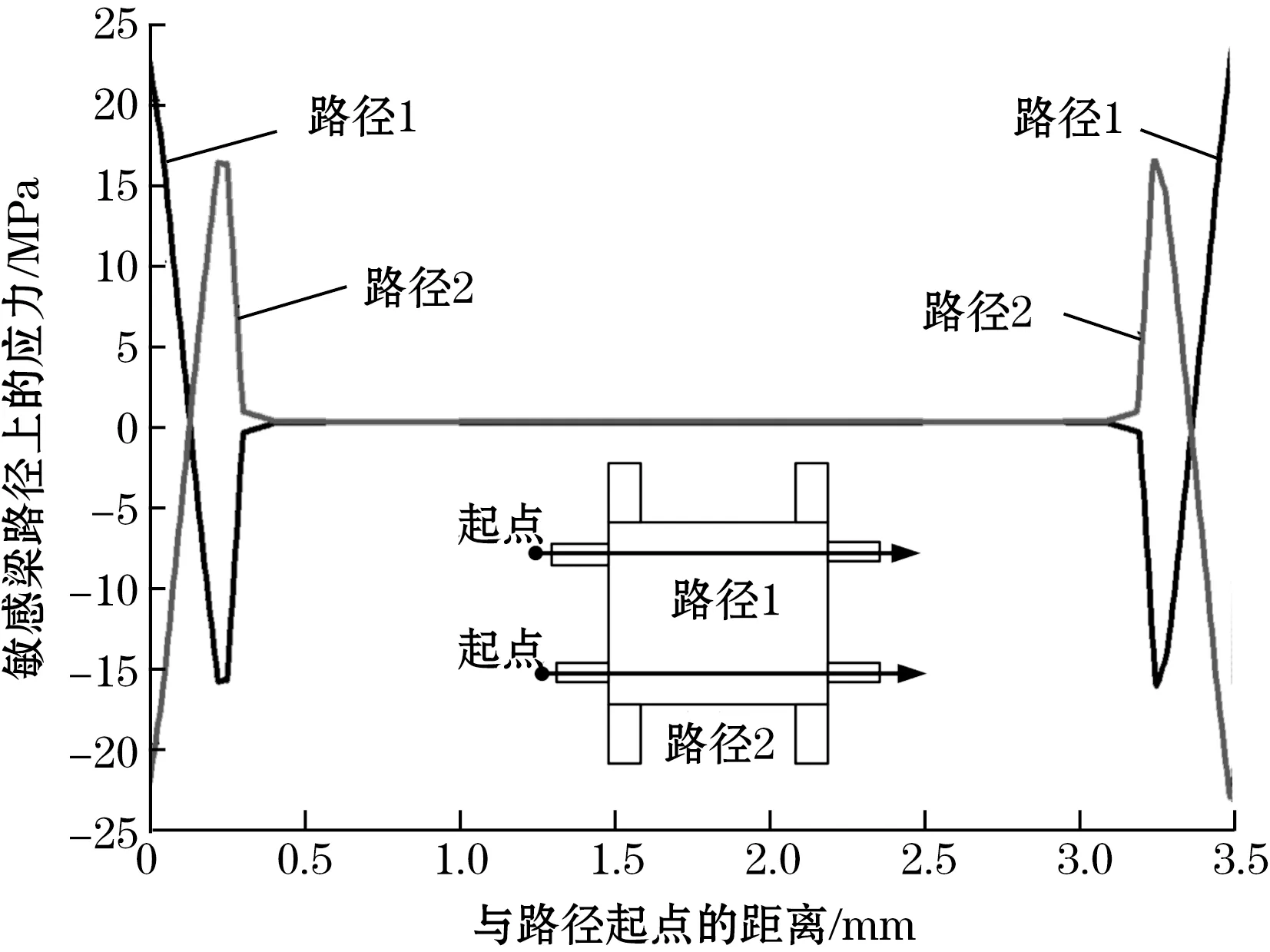
图4 z向加速度作用下敏感梁上应力分布图

表1 复合八梁结构传感器前四阶模态的固有频率 kHz
2.3 传感器信号检测电路设计
压敏电阻的排布方式主要受到敏感梁应力区域以及惠斯登电桥特性影响,首先压敏电阻要求布置在敏感梁应力最大区域,其次是惠斯登电桥的电阻排布。惠斯登电桥压敏电阻排布方式的作用体现在2个方面,一是增大传感器敏感方向的输出,二是消除传感器的横向交叉干扰。本文拟根据惠斯登电桥的特性来确定本文惠斯登电桥的排布方式。惠斯登电桥的特点是如果对角线上的2个压敏电阻的变化大小相等,方向相反,或者4个压敏电阻等大等方向变化,则惠斯登电桥的输出为0,反之,当一组对角线上的2个压敏电阻的变化大小相等,方向一致且与另一组对角线上2个压敏电阻变化方向相反时,则惠斯登电桥的输出为最大。根据前文对复合八梁结构的理论分析和ANSYS仿真分析可知,敏感梁上的应力最大区域主要出现在敏感梁的两侧,且同一根敏感梁两侧的应力值大小相等,方向相反,若要同时使传感器的横向交叉干扰为0,4个压敏电阻应该按照图5所示进行排布。
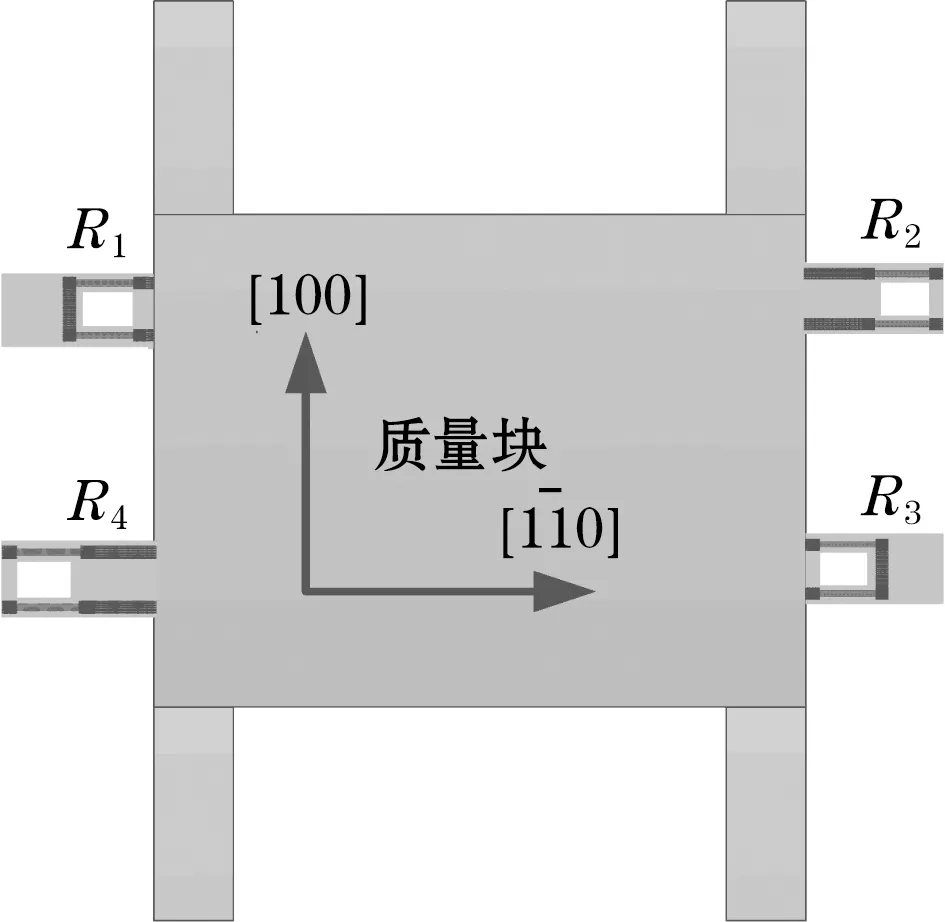
图5 电阻排布图
如图6和7所示,当结构受到x和y方向加速度作用时,惠斯登电桥对角线的2个电阻处于应力相反区域,即变化量大小相等,方向相反,则惠斯登电桥的输出为0;另一方面,还要考虑这样的电阻排布方式对传感器敏感方向输出的影响,当结构受到z向加速度作用的时候,惠斯登电桥对角线的2个电阻处于相同应力区域,即同增同减,传感器在敏感方向具有良好的输出特性。因此验证了上述的电阻排布方式具有可行性,也证明了本文设计的传感器结构具有在理论上同时消除传感器x和y方向的横向交叉干扰的能力。
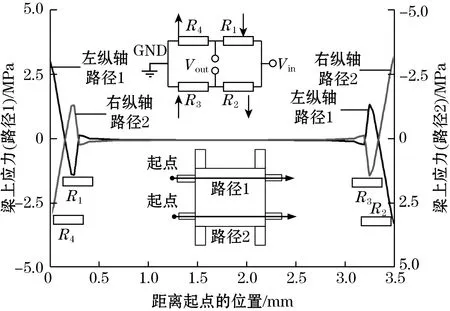
图6 x方向加速度作用下的横向干扰消除原理
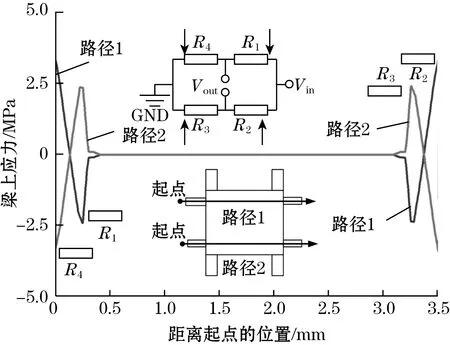
图7 y方向加速度作用下的横向干扰消除原理
2.4 对比分析
前文分别从结构设计和FEM仿真对所设计的低侧向效应MEMS压阻式加速度传感器进行了介绍,为了进一步体现所设计的结构具有优越的性能,采用有限元仿真软件对八梁结构、双桥结构进行仿真分析,并与本文所设计的传感器结构进行对比分析。由于本文所设计的复合八梁结构是将八梁结构的4根梁的尺寸缩小或者是在双桥结构的基础上在质量块另一组对边上添加了4根小梁得到的,因此这里取八梁结构各梁的尺寸均为400 μm×120 μm×22 μm,双桥结构各梁的尺寸也为400 μm×120 μm×22 μm,质量块尺寸与复合八梁一致,仿真结果如表2所示。由表2结果可以看出,本文最终设计的复合八梁结构敏感梁上最大应力与八梁结构基本一致,而固有频率却是八梁结构的2倍;与双桥结构相比,虽然梁上应力有所下降,但是其固有频率却得到了很大的提升。
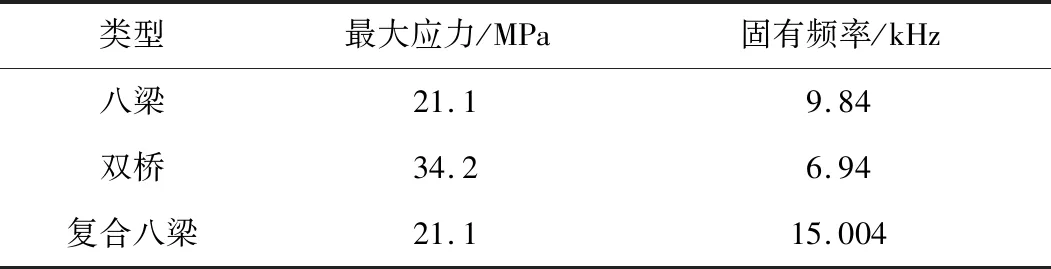
表2 传感器结构性能比较
3 传感器加工
传感器整个加工过程共需要7块掩膜版,其中6块用来制作加速度传感器芯片,1块用来制作玻璃。其中玻璃起到为传感器芯片提供保护和阻尼间隙的作用。硅片的加工主要包括离子注入、深反应离子刻蚀和金属溅射等工艺。具体工艺步骤如下:
(1)压敏电阻轻掺杂,用以制作压敏电阻条,掺杂总剂量和注入能量分别设置为3×1014cm-2和80 keV,获得P型掺杂,最终方块电阻平均值和压敏电阻表面浓度分别为215 Ω和5×1018/cm3。随后将掺杂之后的硅片置于1 100 ℃高温的扩散炉中进行90 min的高温退火,保障掺杂杂质在硅片中的均匀分布[13]。
(2)在完成第一步之后,再次对硅片进行离子注入,以形成欧姆接触区。欧姆接触区的电阻要足够小,因此需要加大硼离子的注入剂量。
(3)利用深反应离子刻蚀方法对传感器的背腔结构进行加工,刻蚀过程中要时刻对刻蚀速率进行控制。硅的刻蚀速率大约为2.5 μm/min。腐蚀的深度约为358 μm。
(4)在以往的传感器设计中,通常采用减薄质量块的方式来为质量块提供阻尼间隙,本文采用在玻璃上腐蚀凹槽的方式来为传感器提供阻尼间隙,这样做不仅可以减少硅微工艺的步骤,而且可以有效降低由于质量块减薄所造成了传感器灵敏度的损失。玻璃的腐蚀深度为22 μm,腐蚀面积为3 550 μm×2 550 μm,腐蚀玻璃采用的溶液为KOH溶液。在350 ℃下,利用阳极键合技术将硅片和玻璃片进行键合,键合中心电压约为1 000 V,边缘电压约800 V,整个键合过程需要约30 min。
(5)引线孔是保障压敏电阻和金属引线之间产生有效连接的关键步骤,其主要通过光刻工艺完成,引线孔的大小在电阻条边界之内以保证金属引线与压敏电阻的有效接触。
(6)采用金属溅射方法制作金属引线,采用Au-Pt-Ti三明治结构金属金线,最终生成Ti-Pt-Au膜的厚度分别为50、50、500 nm。
(7)采用ICP技术刻蚀顶层硅,对传感器敏感结构进行释放,使得质量块成为可动结构,刻蚀间隙宽度为12 μm。制作完成的传感器芯片如图8所示。
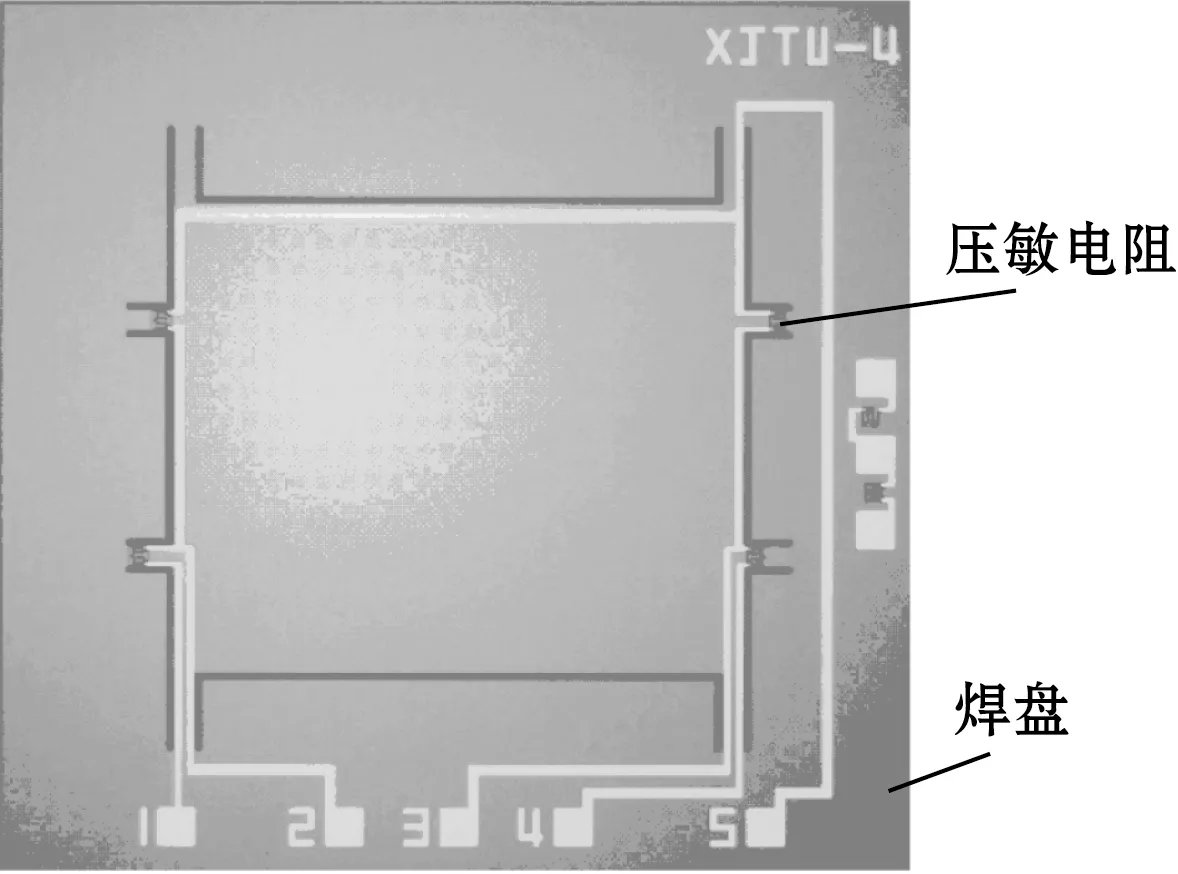
图8 传感器芯片图
4 传感器封装和测试
4.1 传感器封装
本文所研制的复合八梁MEMS低侧向效应压阻式加速度传感器主要应用于高速机床主轴等高频测振等领域,高频加速度信号通过敏感结构和检测电路输出到外界,产生与被测量所对应的电信号。由于研制的传感器芯片体积微小,加之硅材料很容易受到外界环境的污染,因此必须将芯片与外界环境进行隔离[14]。传感器芯片先粘贴于PCB转接板上,用来与外界进行电气连接,不锈钢壳体有效地将传感器芯片与外界环境进行了隔离;在加工传感器的芯片过程中,背面键合的玻璃可以为传感器提供过载保护以及阻尼间隙;采用刚性粘结剂将PCB板粘结于封装壳体内部,降低由于封装带来的传感器固有频率损失。封装完成的传感器芯片如图9所示。

图9 封装完成的芯片图
4.2 传感器测试
图10为加速度传感器的静态标定系统,实验时,由控制主机产生控制信号,驱动转台旋转,从而产生离心加速度信号。测试系统主要包括离心机主机、工作转台、直流电源以及万用表。离心机系统的可用加速度范围为3~200g,最小加速度间隔为3g。为了充分消除实验中存在的各种随机误差,对于敏感方向进行了3次满行程加载和卸载过程,每次所采用的参数条件均一致。图11为传感器传感器的z向输入输出曲线,图12为传感器的的x和y向输入输出曲线,试验结果表明,传感器在8 V供电下的的测量灵敏度为1.798 mV/g,平均零位偏差为2.312 mV。传感器的横向灵敏度与传感器的敏感方向灵敏度的比值可以得出复合八梁结构传感器的x向交叉干扰为0.86%,y向横向交叉干扰为0.77%。
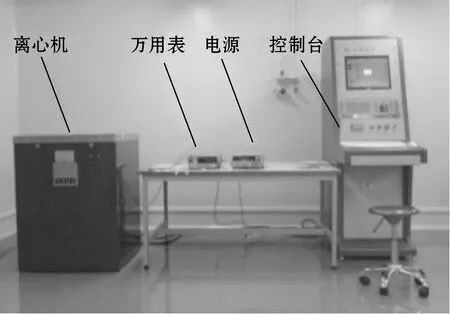
图10 传感器静态性能标定系统
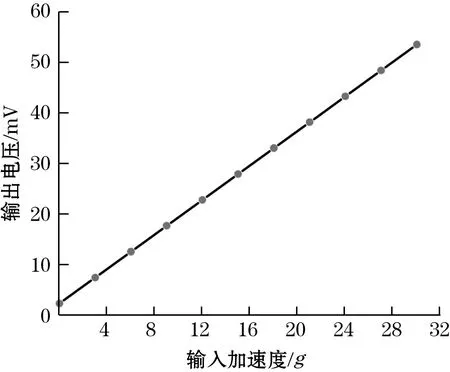
图11 传感器z向输入输出曲线图
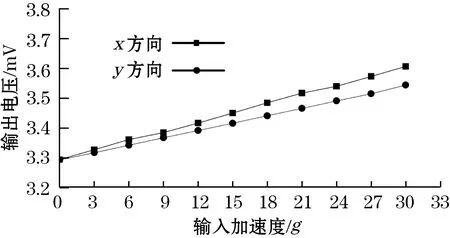
图12 传感器x和y向输入输出曲线图
传感器受到动态加速度作用下的响应特性往往用来表征所设计器件的动态特性指标。在机床主轴振动测试应用中,由于振动信号往往是动态信号,即大小和时间都会随着时间而变化,这时就需要所设计的传感器不仅要能精确测量信号幅值的大小,而且能够对大范围的频率变化具有良好的响应。本文采用冲击响应法测试传感器的固有频率,即通过落锤施加给传感器一个冲击响应信号,通过计算输出波形的周期来确定传感器的动态响应范围,测试方法为首先将传感器固定在虎钳上,使其在x和y方向被卡死,然后将传感器的信号接入放大调理电路中,并将放大后的信号接入示波器进行分析,之后用落锤沿着传感器敏感方向进行多次敲击,保存每次敲击后示波器的输出数据。最后用沃尔曼滤波器对传感器信号进行滤波分析,敲击实验共进行了20余次,其中最大的输出响应如图13所示,由图13可以看出,传感器的输出响应的第1个峰值出现在0.05 ms处,第4个波峰出现在0.27 ms处,因此输出波形的周期可以计算为0.071 ms,因此,可以计算得到传感器的响应频率为14 kHz。
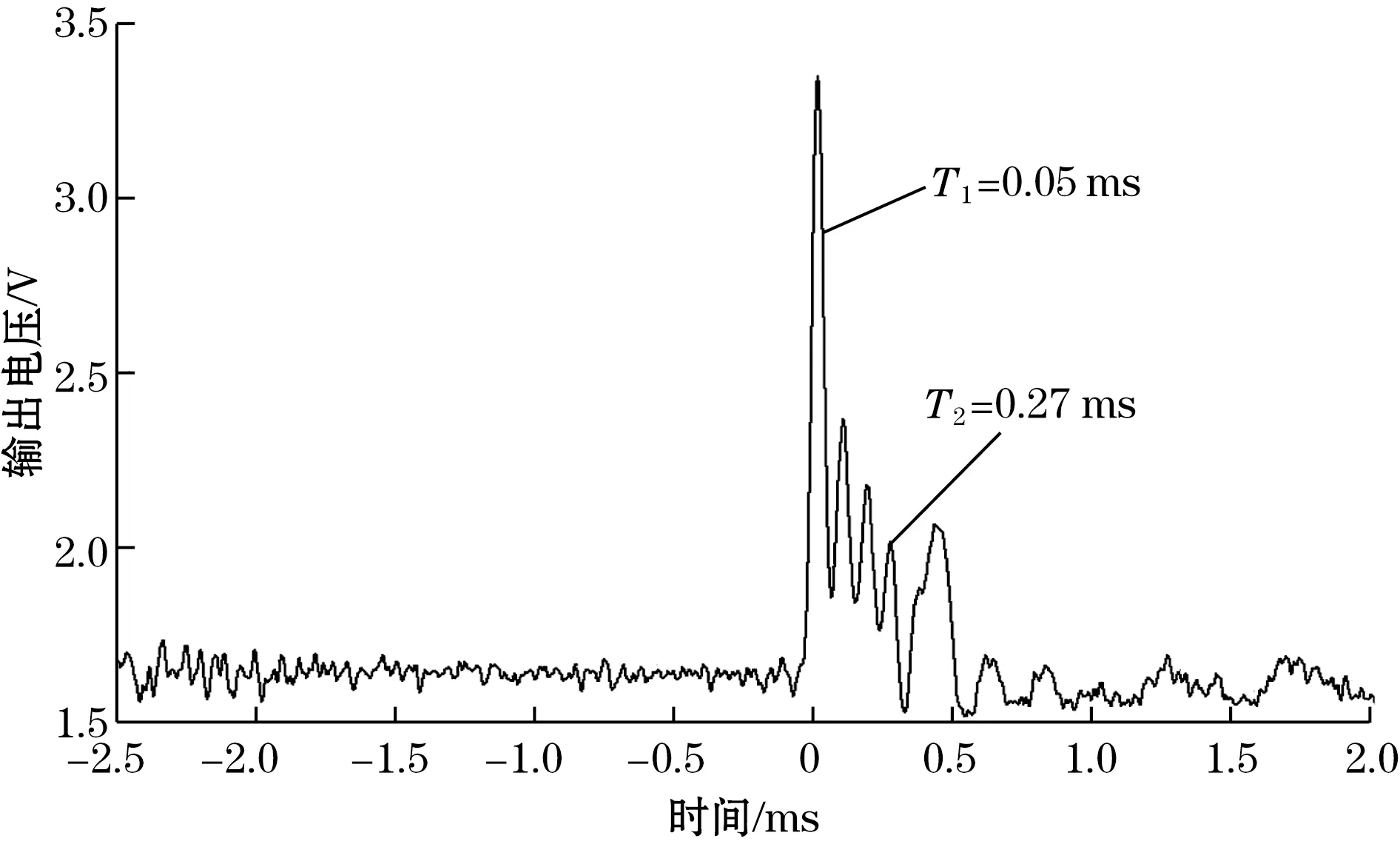
图13 冲击法测量传感器动态响应
5 结论
本文针对传统压阻式传感器侧向效应无法被彻底消除的技术难题,提出了一种具有复合八梁结构的低侧向效应MEMS压阻式加速度传感器,通过仿真分析得到了敏感结构梁上的应力分布图,并利用应力分布特点优化了传感器信号检测电路,从理论上消除了传感器的横向交叉干扰;利用MEMS加工技术对传感器进行了加工,并完成了传感器的封装测试工作,测试结果表明传感器的测量灵敏度为1.798 mV/g;固有频率为14 kHz;横向交叉干扰小于1%;表明该传感器具有较低的横向交叉干扰。
